
椭圆—正弦非圆—非圆三轮同步带传动设计方法.pdf

觅松****哥哥


1/10

2/10

3/10

4/10

5/10

6/10

7/10

8/10

9/10

10/10
亲,该文档总共17页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
椭圆—正弦非圆—非圆三轮同步带传动设计方法.pdf
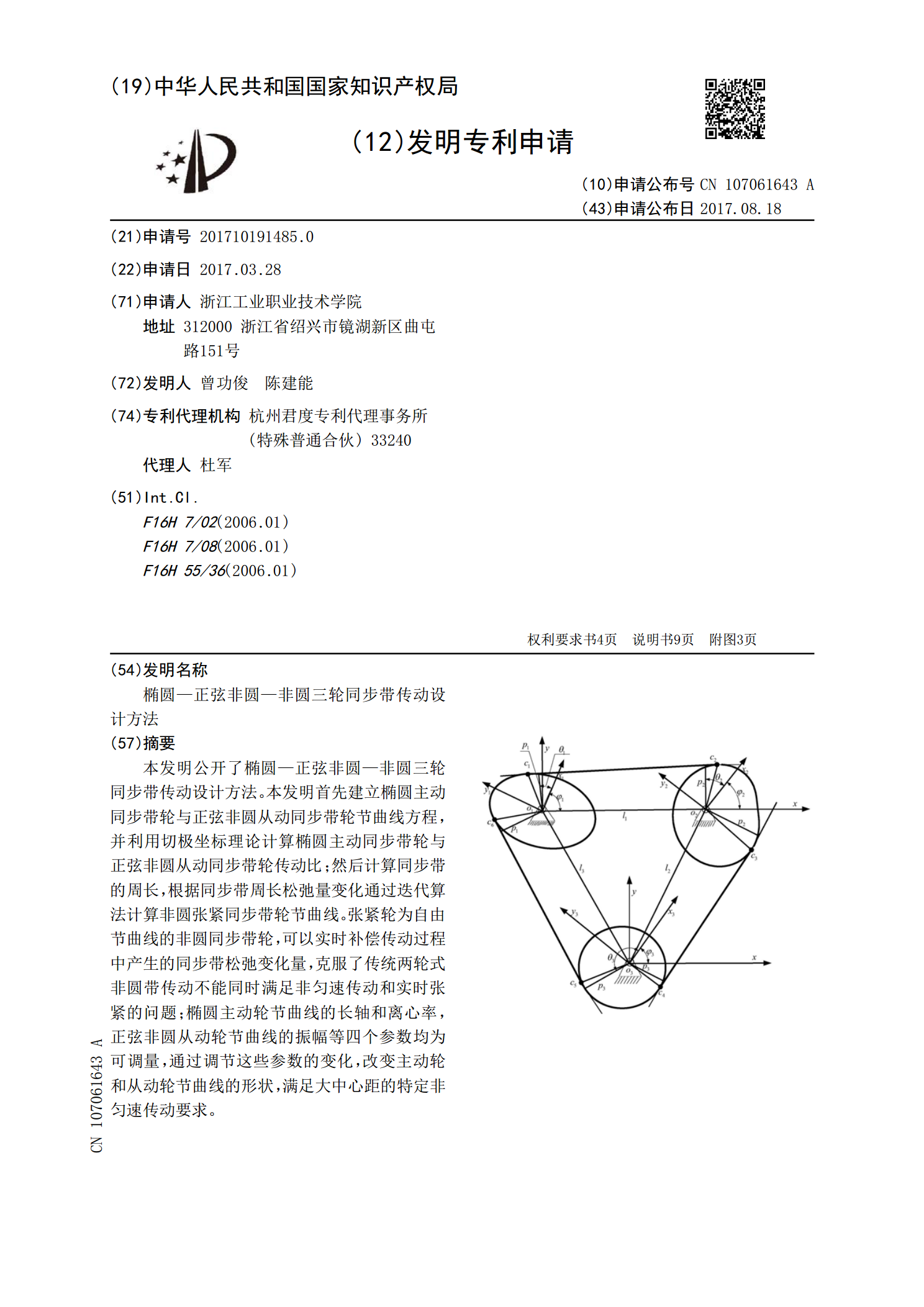
本发明公开了椭圆—正弦非圆—非圆三轮同步带传动设计方法。本发明首先建立椭圆主动同步带轮与正弦非圆从动同步带轮节曲线方程,并利用切极坐标理论计算椭圆主动同步带轮与正弦非圆从动同步带轮传动比;然后计算同步带的周长,根据同步带周长松弛量变化通过迭代算法计算非圆张紧同步带轮节曲线。张紧轮为自由节曲线的非圆同步带轮,可以实时补偿传动过程中产生的同步带松弛变化量,克服了传统两轮式非圆带传动不能同时满足非匀速传动和实时张紧的问题;椭圆主动轮节曲线的长轴和离心率,正弦非圆从动轮节曲线的振幅等四个参数均为可调量,通过调节这

圆—椭圆—非圆三轮同步带传动设计方法.pdf
本发明公开了圆—椭圆—非圆三轮同步带传动设计方法。本发明首先建立同步带主从动轮的节曲线方程,并利用切极坐标理论计算主从动轮传动比;然后计算同步带的周长,根据同步带周长松弛量变化通过迭代算法计算非圆张紧同步带轮自由节曲线,张紧轮为自由节曲线的非圆同步带轮,可以实时补偿传动过程中产生的同步带松弛变化量,克服了传统两轮式非圆带传动不能同时满足非匀速传动和实时张紧的问题;圆主动同步带轮节曲线的半径和椭圆从动同步带轮节曲线的长轴、离心率均为可调量,通过三个量的调节改变圆主动轮节曲线和椭圆从动轮节曲线的形状,满足大中
巴斯噶非圆—正弦非圆—非圆三轮同步带传动设计方法.pdf
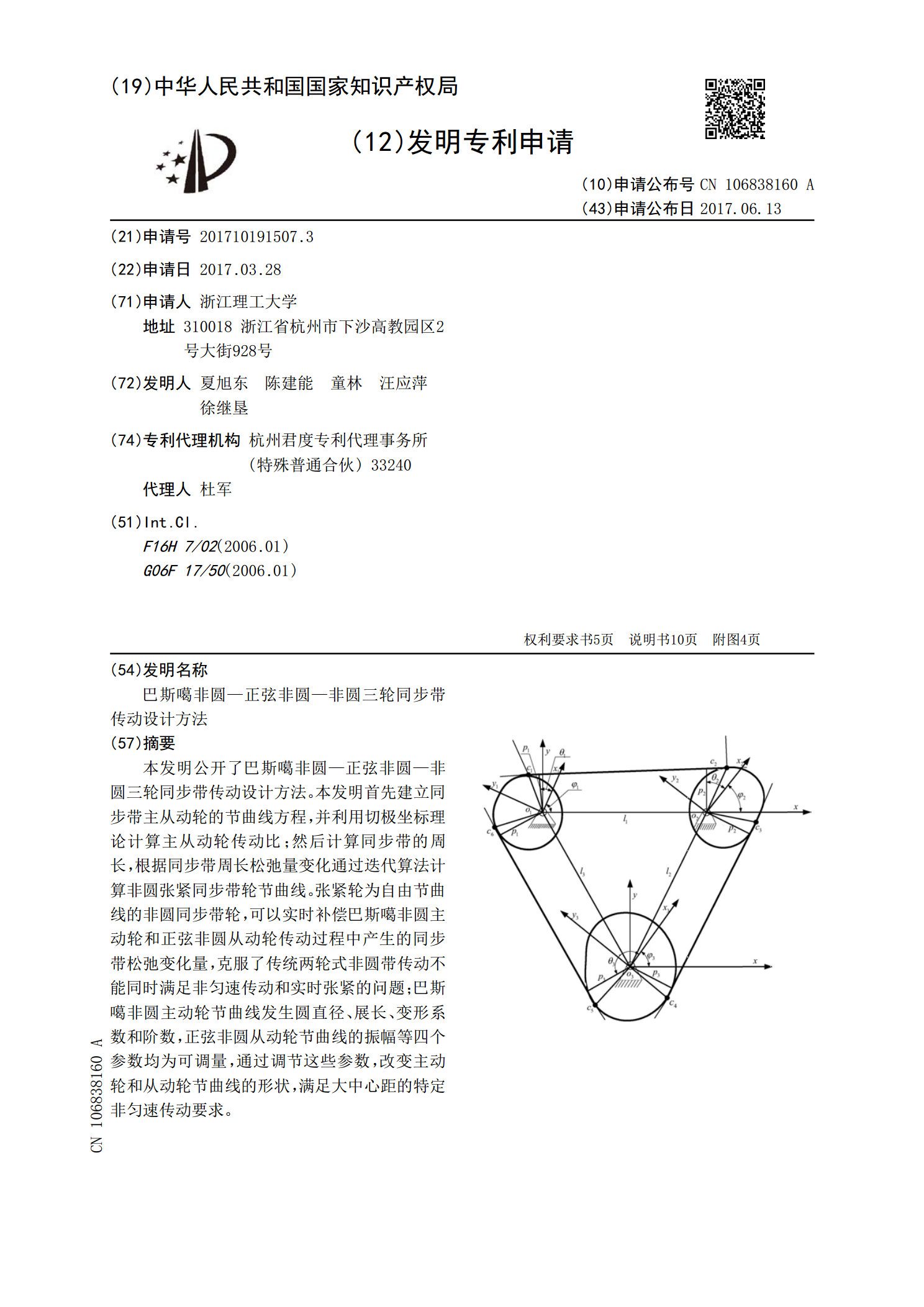
本发明公开了巴斯噶非圆—正弦非圆—非圆三轮同步带传动设计方法。本发明首先建立同步带主从动轮的节曲线方程,并利用切极坐标理论计算主从动轮传动比;然后计算同步带的周长,根据同步带周长松弛量变化通过迭代算法计算非圆张紧同步带轮节曲线。张紧轮为自由节曲线的非圆同步带轮,可以实时补偿巴斯噶非圆主动轮和正弦非圆从动轮传动过程中产生的同步带松弛变化量,克服了传统两轮式非圆带传动不能同时满足非匀速传动和实时张紧的问题;巴斯噶非圆主动轮节曲线发生圆直径、展长、变形系数和阶数,正弦非圆从动轮节曲线的振幅等四个参数均为可调量,

圆—傅里叶非圆—非圆三轮同步带传动设计方法.pdf
本发明公开了一种圆—傅里叶非圆—非圆三轮同步带传动设计方法。本发明主动轮是常规的圆形同步带轮;从动轮是傅里叶同步带轮,其输出规律决定于从动轮的傅里叶曲线参数;张紧轮是非圆同步带轮,它起到实时补偿主动轮、从动轮传动过程中带来的同步带松弛量变化。本发明首先建立同步带主从动轮的节曲线方程,并利用切极坐标理论计算主从动轮传动比;然后计算同步带的周长,根据同步带周长松弛量变化通过迭代方法计算张紧同步带轮节曲线的各项参数。本发明为实现大中心距的非匀速直接精确传动提供一种新传动机构和新设计方法,同时满足非匀速传动和实时

圆—偏心圆—非圆三轮同步带传动设计方法.pdf
本发明公开了圆—偏心圆—非圆三轮同步带传动设计方法。本发明首先建立同步带主从动轮的节曲线方程,并利用切极坐标理论计算主从动轮传动比;然后计算同步带的周长,根据同步带周长松弛量变化通过迭代算法得到非圆张紧同步带轮节曲线,并公开了非圆同步带轮齿廓生成方法;张紧轮为自由节曲线的非圆同步带轮,可以实时补偿传动过程中产生的同步带松弛变化量,克服传统两轮式非圆带传动不能同时满足非匀速传动和实时张紧问题;圆主动轮节曲线的半径、偏心圆从动轮节曲线的半径和偏心距为可调量,通过三个量的调节可以改变主动轮和从动轮节曲线的形状,