
一种轮式机器人参数调校的优化方法、装置和系统.pdf

是你****优呀


1/10

2/10

3/10

4/10

5/10

6/10

7/10

8/10

9/10

10/10
亲,该文档总共17页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

一种轮式机器人参数调校的优化方法、装置和系统.pdf
一种轮式机器人参数调校的优化方法包括:通过固定的第一摄像头和第二摄像头获取包括所述轮式机器人的第一图像、第二图像和第三图像。根据所述第一摄像头、第二摄像头的位置以及获取的图像中的轮式机器人的位置,确定所述轮式机器人在拐点位置顺时针旋转的往返路径的第一夹角及在拐点位置逆时针旋转的往返路径的第二夹角,以及单程实际直线距离,根据所述第一夹角及在第二夹角,以及单程实际直线距离进行误差轮式机器人的调校参数的计算。由于只需要进行往返测试,对测试场地的面积要求较小,并且每次测试对起点位置的要求不高,不需要对偏差进行忽略

一种轮式机器人的误差调校方法和装置.pdf
一种轮式机器人的误差调校方法包括:通过往返测试的方式,获取轮式机器人往返的实际距离、在拐点顺时针拐弯时的往返路线的第一夹角,以及在拐点逆时针拐弯时的往返路线的第二夹角;根据述述往返的实际距离与轮式机器人的理论距离值,获得理想平均轮径与实际轮径之间的偏差的调校参数;根据所述第一偏差角,以及第一偏差角与第二偏差角之和,确定理论轮距与实际轮距的调校参数,根据所述第三偏差角、所述往返的实际距离以及实际轴距离,确定左右轮直径不等调校参数。该方法通过往返测试的方式,占用测试场地小,可以简单方便的对轮式机器人的各个调校

一种轮式装甲战车车轮前束调校装置及其调校方法.pdf
本发明涉及军队车辆后勤保障对特种战车的检修养护技术领域,具体涉及一种轮式装甲战车车轮前束调校装置及其调校方法,包括六个探头所含的十个光敏测量模组和六个二维角度传感器,并配有智能处理控制主板和计算机处理系统还包括配合测量和调整的底盘转向拉臂测量装置。本发明通过角度换算可以进行军用战车三桥、四桥以及多桥的同步测量,便将基于不同基准的单轮前束角补偿到同一个基准线上,将差值计算到每个车轮的前束角中,便能得到统一基准的六轮、八轮前束角,方便车辆维护调整,本发明结构简单,测量方便。
一种轮式机器人的定位方法和装置.pdf
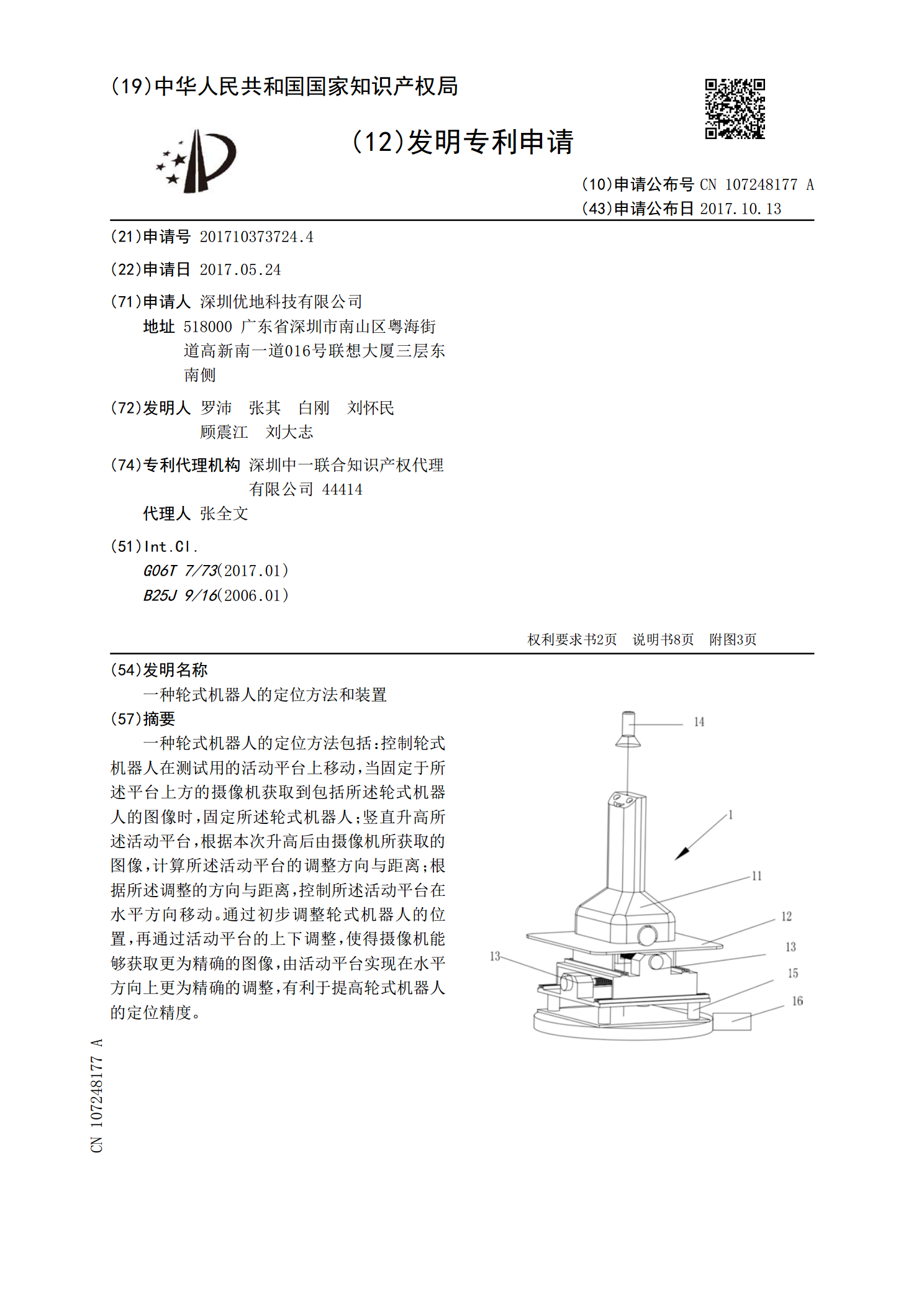
一种轮式机器人的定位方法包括:控制轮式机器人在测试用的活动平台上移动,当固定于所述平台上方的摄像机获取到包括所述轮式机器人的图像时,固定所述轮式机器人;竖直升高所述活动平台,根据本次升高后由摄像机所获取的图像,计算所述活动平台的调整方向与距离;根据所述调整的方向与距离,控制所述活动平台在水平方向移动。通过初步调整轮式机器人的位置,再通过活动平台的上下调整,使得摄像机能够获取更为精确的图像,由活动平台实现在水平方向上更为精确的调整,有利于提高轮式机器人的定位精度。
一种轮式机器人定位方法和轮式机器人.pdf
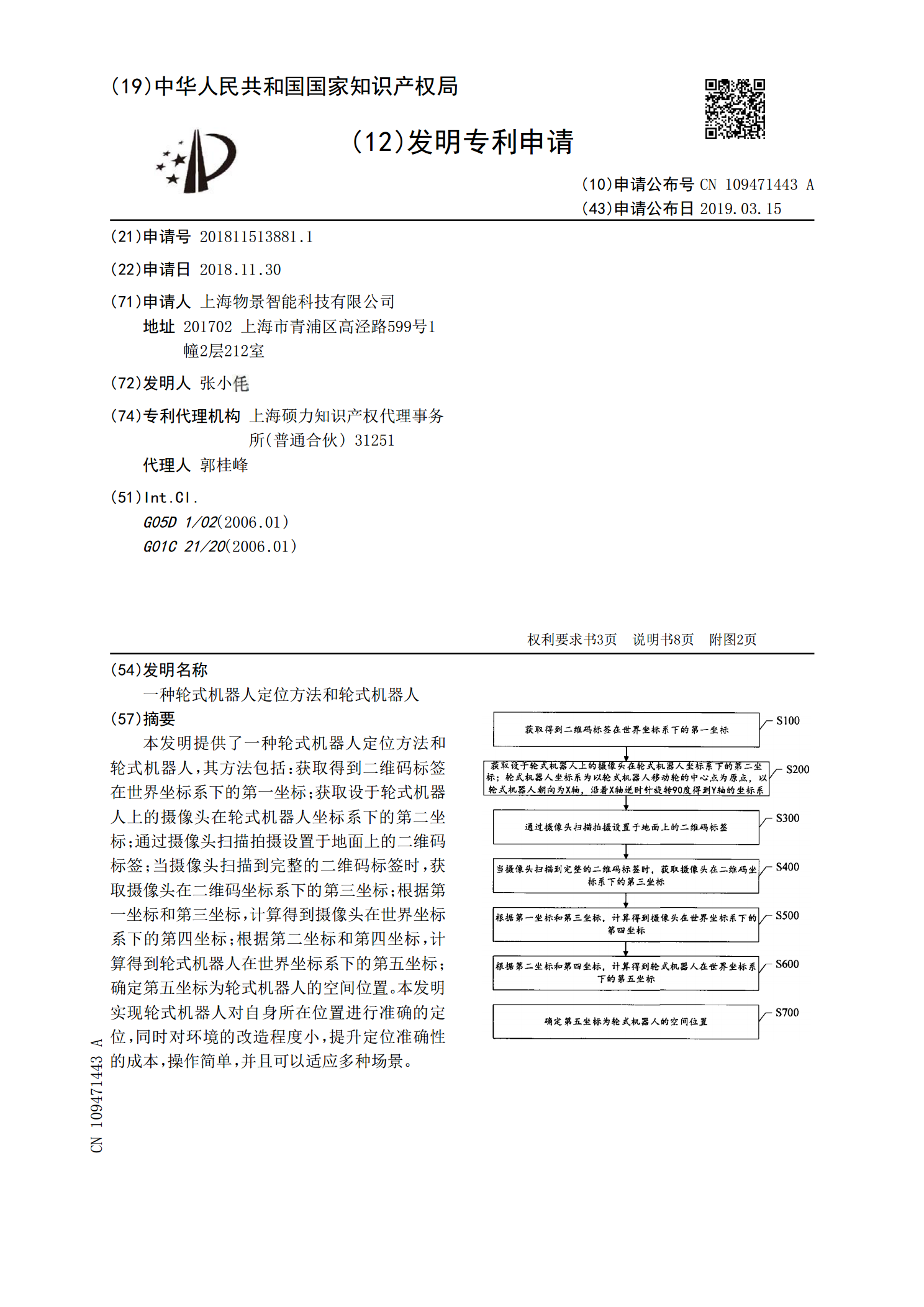
本发明提供了一种轮式机器人定位方法和轮式机器人,其方法包括:获取得到二维码标签在世界坐标系下的第一坐标;获取设于轮式机器人上的摄像头在轮式机器人坐标系下的第二坐标;通过摄像头扫描拍摄设置于地面上的二维码标签;当摄像头扫描到完整的二维码标签时,获取摄像头在二维码坐标系下的第三坐标;根据第一坐标和第三坐标,计算得到摄像头在世界坐标系下的第四坐标;根据第二坐标和第四坐标,计算得到轮式机器人在世界坐标系下的第五坐标;确定第五坐标为轮式机器人的空间位置。本发明实现轮式机器人对自身所在位置进行准确的定位,同时对环境的