
基于集装箱箱区轮廓三维识别的吊具安全防撞系统及方法.pdf

是你****晨呀


1/10

2/10

3/10

4/10

5/10

6/10

7/10

8/10

9/10

10/10
亲,该文档总共12页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
基于集装箱箱区轮廓三维识别的吊具安全防撞系统及方法.pdf
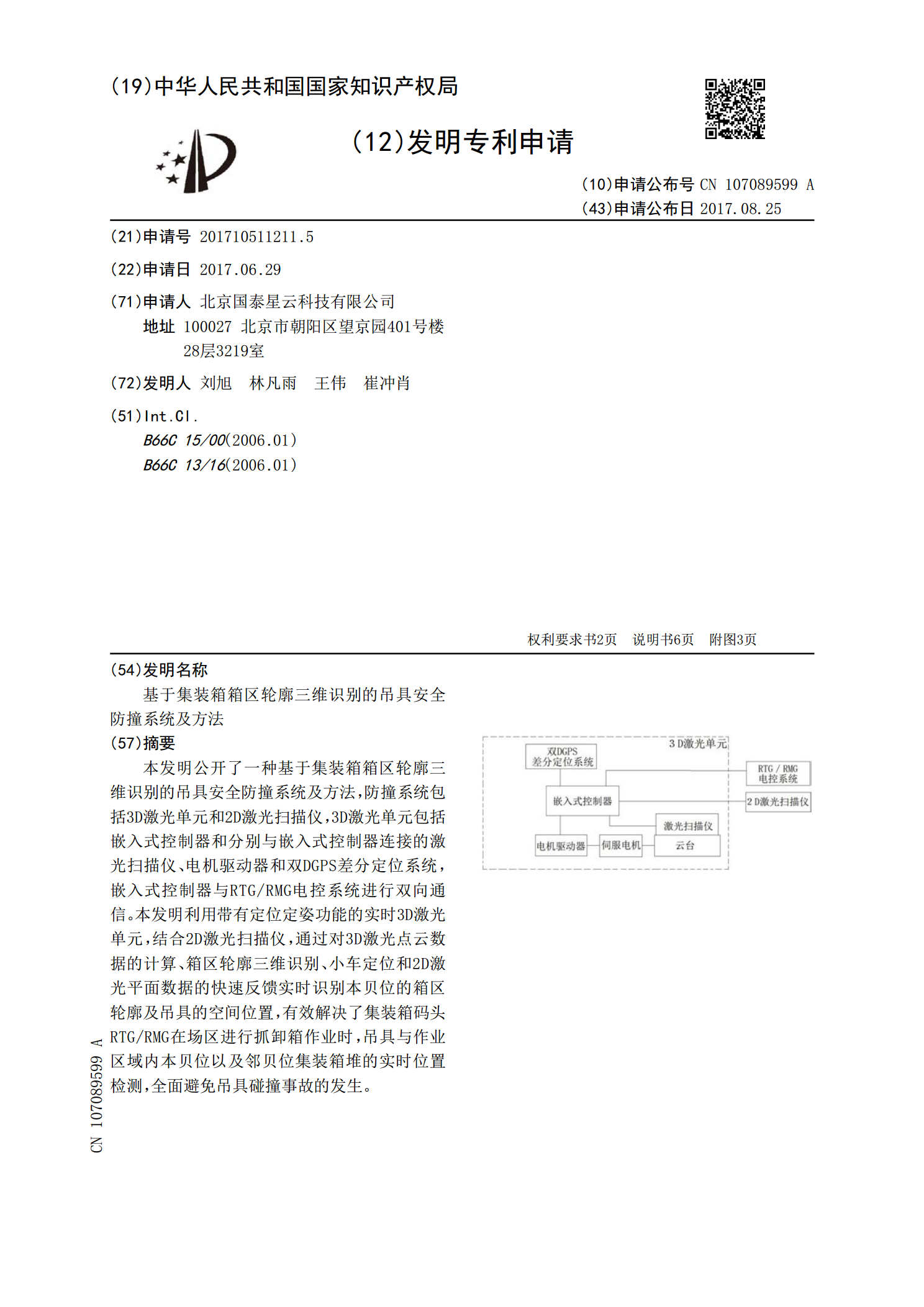
本发明公开了一种基于集装箱箱区轮廓三维识别的吊具安全防撞系统及方法,防撞系统包括3D激光单元和2D激光扫描仪,3D激光单元包括嵌入式控制器和分别与嵌入式控制器连接的激光扫描仪、电机驱动器和双DGPS差分定位系统,嵌入式控制器与RTG/RMG电控系统进行双向通信。本发明利用带有定位定姿功能的实时3D激光单元,结合2D激光扫描仪,通过对3D激光点云数据的计算、箱区轮廓三维识别、小车定位和2D激光平面数据的快速反馈实时识别本贝位的箱区轮廓及吊具的空间位置,有效解决了集装箱码头RTG/RMG在场区进行抓卸箱作业时
集装箱码头岸桥下的船舶轮廓识别和吊具防撞系统及方法.pdf
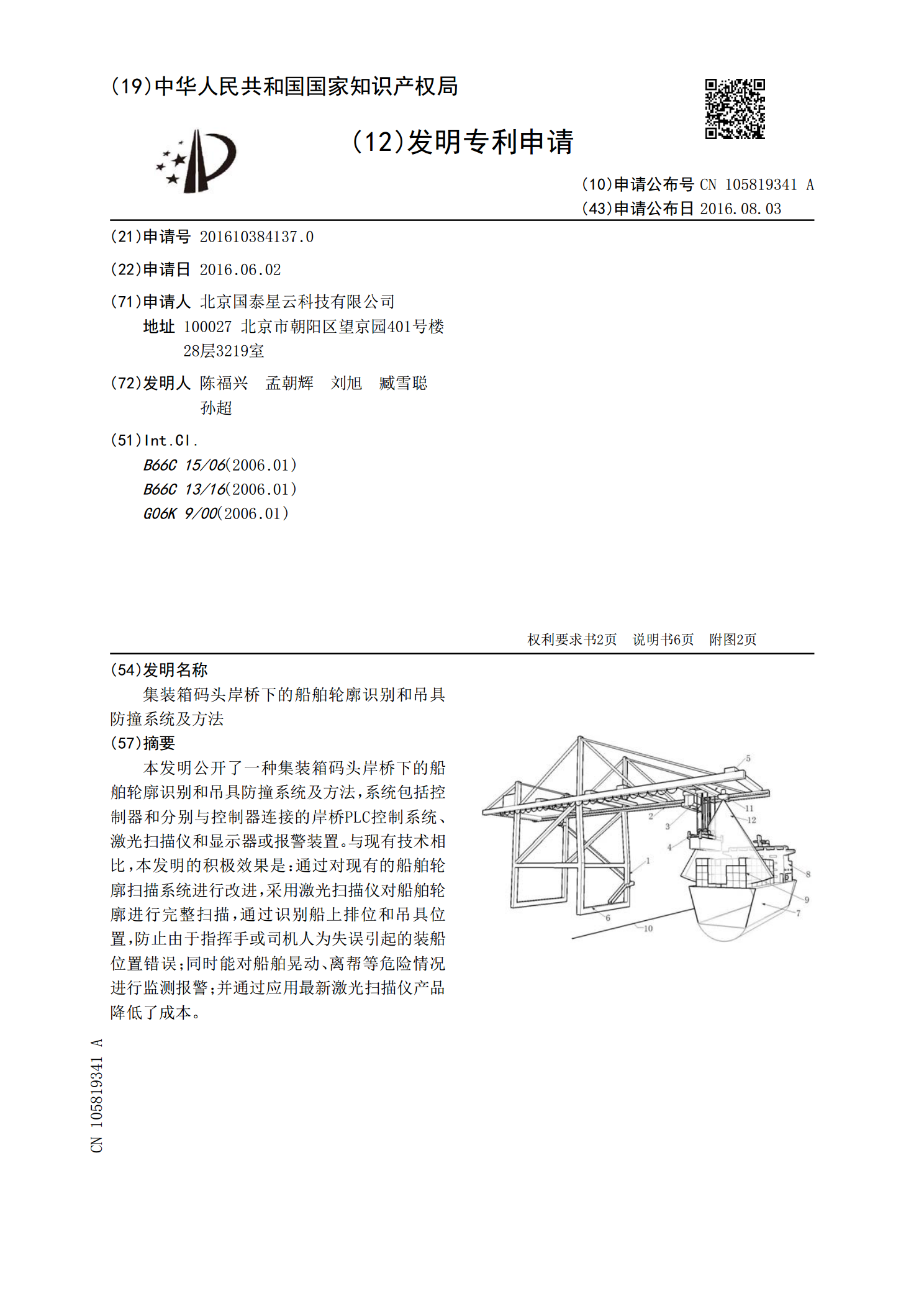
本发明公开了一种集装箱码头岸桥下的船舶轮廓识别和吊具防撞系统及方法,系统包括控制器和分别与控制器连接的岸桥PLC控制系统、激光扫描仪和显示器或报警装置。与现有技术相比,本发明的积极效果是:通过对现有的船舶轮廓扫描系统进行改进,采用激光扫描仪对船舶轮廓进行完整扫描,通过识别船上排位和吊具位置,防止由于指挥手或司机人为失误引起的装船位置错误;同时能对船舶晃动、离帮等危险情况进行监测报警;并通过应用最新激光扫描仪产品降低了成本。

集装箱吊具的视觉识别系统以及集装箱的吊箱方法.pdf
本发明公开了一种集装箱吊具的视觉识别系统,包括控制装置,控制装置分别连接安装于吊具的视频输入设备、用于显示视频输入设备所拍摄图像的显示设备,所述的视频输入设备有4组,分别安装于吊具的四个角处,用于拍摄下方集装箱的四个顶角以及每个顶角所对应的锁孔的位置;然后将4个视频输入设备的图像拼接形成一个图像;控制装置设有数据处理单元以及对接单元;数据处理单元对图像中的集装箱的轮廓特征以及锁孔特征进行识别,计算集装箱与吊具之间的角度偏移量与位置偏移量;对接单元将数据处理单元计算的角度偏移量与位置偏移量传送给plc,由p
基于物体轮廓跟踪的集装箱码头场桥防撞控制系统及方法.pdf
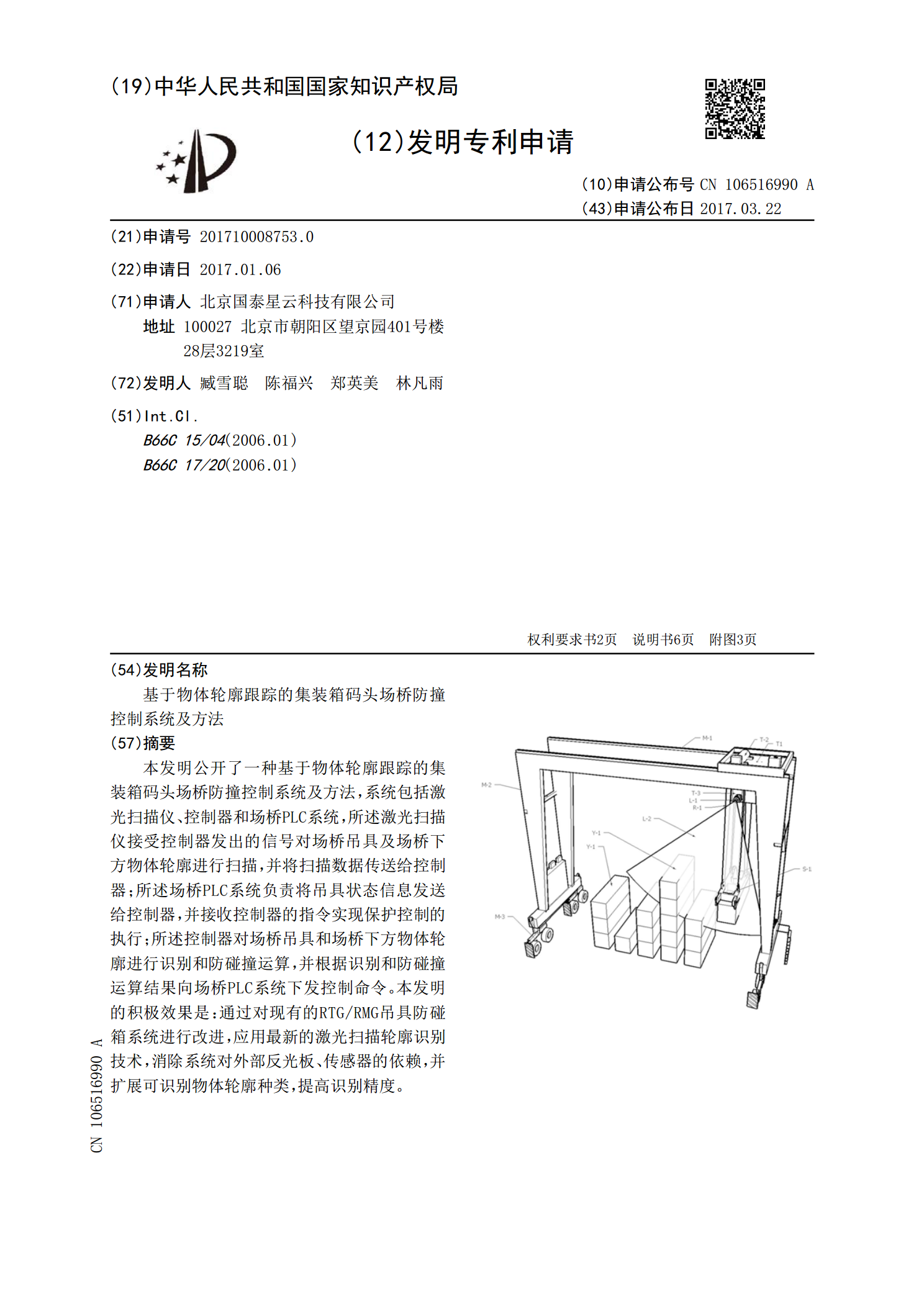
本发明公开了一种基于物体轮廓跟踪的集装箱码头场桥防撞控制系统及方法,系统包括激光扫描仪、控制器和场桥PLC系统,所述激光扫描仪接受控制器发出的信号对场桥吊具及场桥下方物体轮廓进行扫描,并将扫描数据传送给控制器;所述场桥PLC系统负责将吊具状态信息发送给控制器,并接收控制器的指令实现保护控制的执行;所述控制器对场桥吊具和场桥下方物体轮廓进行识别和防碰撞运算,并根据识别和防碰撞运算结果向场桥PLC系统下发控制命令。本发明的积极效果是:通过对现有的RTG/RMG吊具防碰箱系统进行改进,应用最新的激光扫描轮廓识别

一种吊具防撞保护方法、控制器、系统及岸桥.pdf
本申请涉及工程机械领域,具体涉及一种吊具防撞保护方法、控制器、系统及岸桥。本申请提供的这种吊具防撞保护方法,包括获取吊具的运行状态信息;获取吊具的预测运行轨迹;获取障碍物的位置信息;根据吊具的预测运行轨迹以及障碍物的位置信息,生成提示信息;当提示信息提示吊具将与障碍物相撞时,根据预测运行轨迹以及障碍物的位置信息生成控制指令,控制指令用于提示或控制吊具躲避障碍物。通过对吊具的运行移动轨迹进行预测,及时调整吊具的移动参数,从而对吊具起到防撞保护的作用,当吊具不存在与障碍物相撞的风险时,也减少了将吊具与障碍物之