
集装箱吊具的视觉识别系统以及集装箱的吊箱方法.pdf

一只****生物


1/10

2/10

3/10

4/10

5/10

6/10

7/10

8/10

9/10

10/10
亲,该文档总共12页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

集装箱吊具的视觉识别系统以及集装箱的吊箱方法.pdf
本发明公开了一种集装箱吊具的视觉识别系统,包括控制装置,控制装置分别连接安装于吊具的视频输入设备、用于显示视频输入设备所拍摄图像的显示设备,所述的视频输入设备有4组,分别安装于吊具的四个角处,用于拍摄下方集装箱的四个顶角以及每个顶角所对应的锁孔的位置;然后将4个视频输入设备的图像拼接形成一个图像;控制装置设有数据处理单元以及对接单元;数据处理单元对图像中的集装箱的轮廓特征以及锁孔特征进行识别,计算集装箱与吊具之间的角度偏移量与位置偏移量;对接单元将数据处理单元计算的角度偏移量与位置偏移量传送给plc,由p

能够自动倾倒以及平稳释放的集装箱吊具.pdf
本发明公开了能够自动倾倒以及平稳释放的集装箱吊具,包括自适应装置,所述自适应装置上端设置有吊柱,所述吊柱上端设置有自动倾倒装置,所述自适应装置下端设置有锁销装置,所述吊柱中空,所述吊柱内设置有稳压装置,所述自动倾倒装置内设置有重力补偿装置;本发明公开的自动倾倒装置利用集装箱的重力自动完成集装箱的倾斜卸货,结构简单,且只需要借助较少的外力,倾倒过程中消耗的动能较少,经济环保,锁销装置可缓解吊具夹持集装箱时的冲击力,减缓集装箱或夹具零件的磨损,稳压装置对集装箱形成竖直的压力,配合锁销装置的夹持,使吊具对集装箱

集装箱吊具的转销驱动装置.pdf
集装箱吊具的转销驱动装置,用往复直线运动电动机代替立式平行轴斜齿轮减速电机来驱动电动吊具的转销机构,解决因为减速电机行程不准和因电机损坏而造成的吊具故障,其特征在于包括直线运动电动机、连杆和转销组件,直线运动电动机在两端各具有动力输出轴,各动力输出轴可转动地连接连杆的第一端,连杆的第二端可转动地连接一转柄,转柄连接转销组件,动力输出轴和连杆之间的转动中心线与连杆和转柄之间的转动中心线平行。

集装箱吊具旋锁管理新方法.docx
集装箱吊具旋锁管理新方法随着国家的发展和经济的繁荣,海洋运输的重要性越来越被重视,而集装箱作为一种重要的货物运输方式,其吊装过程和安全管理也越来越引起人们的关注。而集装箱旋锁作为集装箱吊装过程中不可或缺的一部分,其管理也越来越被重视。本文将针对集装箱吊具旋锁的管理问题,提出一些新的管理方法,使得旋锁使用更加安全和方便。一、需求分析在集装箱运输中,旋锁作为固定集装箱位置的重要工具,其使用原则主要是能够承载一定的拉力和保证安全。因此,对于旋锁的管理和使用,应根据实际需求进行分析。1.安全性需求:集装箱吊装过程
一种组合式集装箱吊拼装吊具.pdf
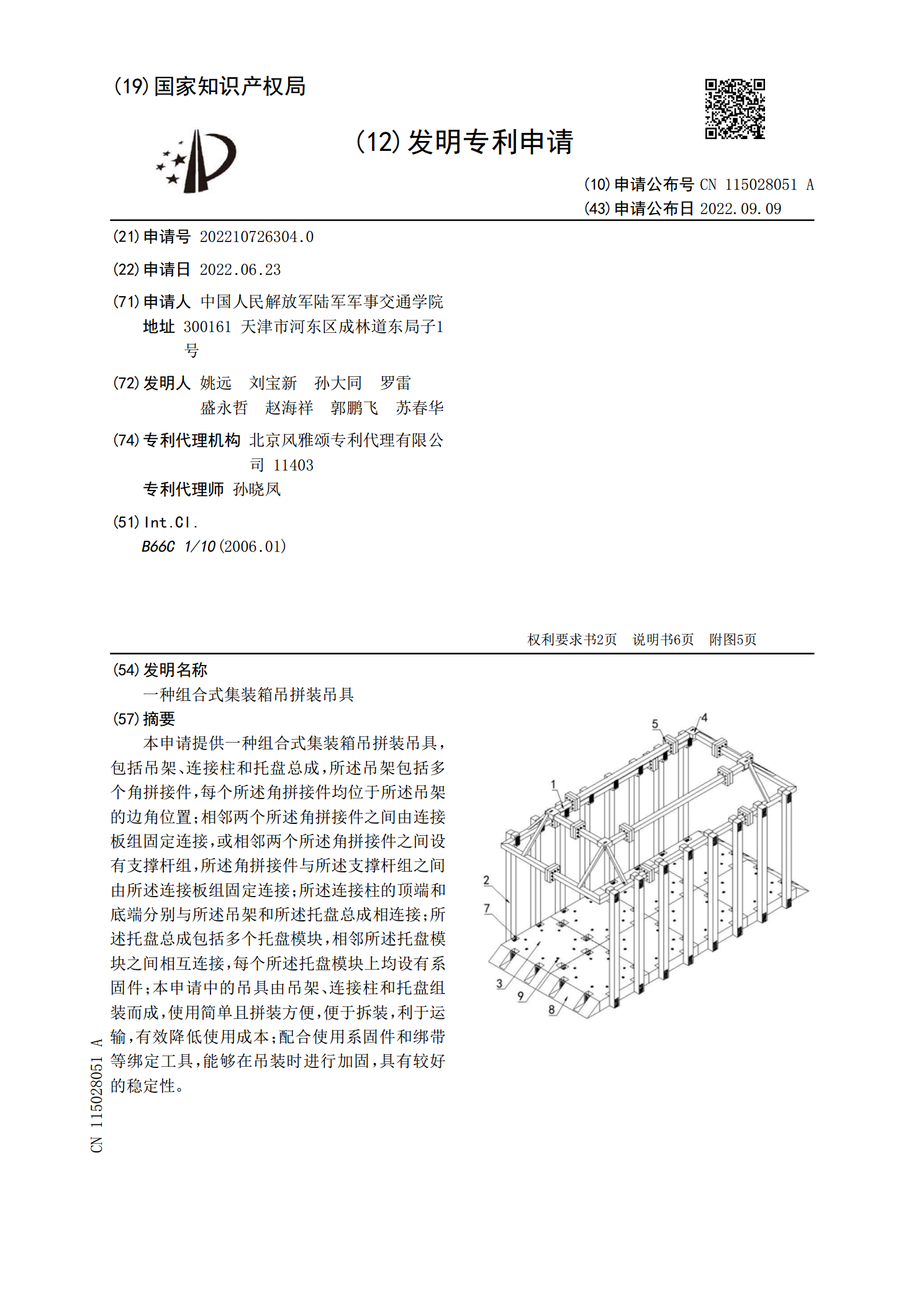
本申请提供一种组合式集装箱吊拼装吊具,包括吊架、连接柱和托盘总成,所述吊架包括多个角拼接件,每个所述角拼接件均位于所述吊架的边角位置;相邻两个所述角拼接件之间由连接板组固定连接,或相邻两个所述角拼接件之间设有支撑杆组,所述角拼接件与所述支撑杆组之间由所述连接板组固定连接;所述连接柱的顶端和底端分别与所述吊架和所述托盘总成相连接;所述托盘总成包括多个托盘模块,相邻所述托盘模块之间相互连接,每个所述托盘模块上均设有系固件;本申请中的吊具由吊架、连接柱和托盘组装而成,使用简单且拼装方便,便于拆装,利于运输,有效