
一种吊具防撞保护方法、控制器、系统及岸桥.pdf

St****12


1/10

2/10

3/10

4/10

5/10

6/10

7/10

8/10

9/10

10/10
亲,该文档总共24页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

一种吊具防撞保护方法、控制器、系统及岸桥.pdf
本申请涉及工程机械领域,具体涉及一种吊具防撞保护方法、控制器、系统及岸桥。本申请提供的这种吊具防撞保护方法,包括获取吊具的运行状态信息;获取吊具的预测运行轨迹;获取障碍物的位置信息;根据吊具的预测运行轨迹以及障碍物的位置信息,生成提示信息;当提示信息提示吊具将与障碍物相撞时,根据预测运行轨迹以及障碍物的位置信息生成控制指令,控制指令用于提示或控制吊具躲避障碍物。通过对吊具的运行移动轨迹进行预测,及时调整吊具的移动参数,从而对吊具起到防撞保护的作用,当吊具不存在与障碍物相撞的风险时,也减少了将吊具与障碍物之
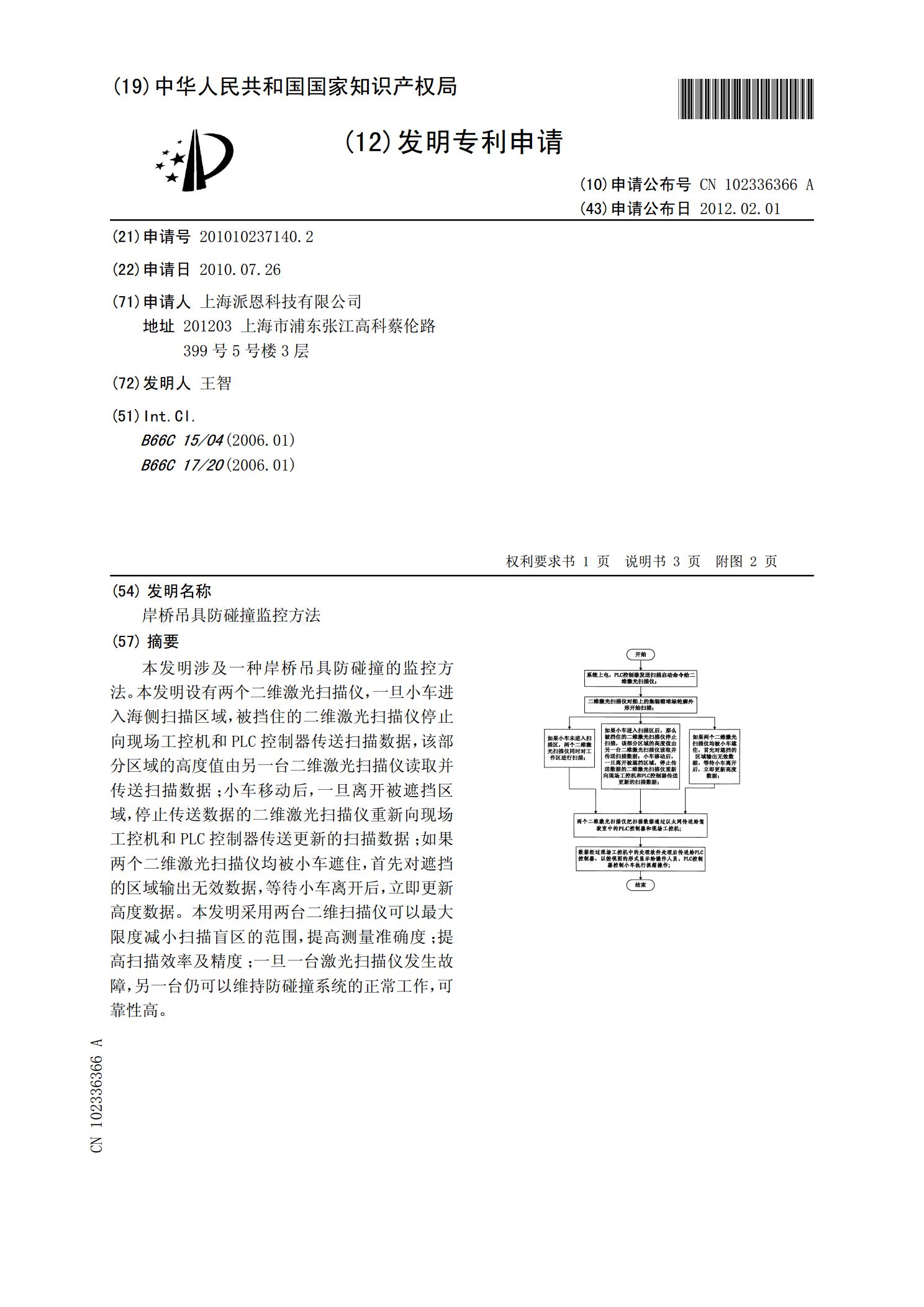
岸桥吊具防碰撞监控方法.pdf
本发明涉及一种岸桥吊具防碰撞的监控方法。本发明设有两个二维激光扫描仪,一旦小车进入海侧扫描区域,被挡住的二维激光扫描仪停止向现场工控机和PLC控制器传送扫描数据,该部分区域的高度值由另一台二维激光扫描仪读取并传送扫描数据;小车移动后,一旦离开被遮挡区域,停止传送数据的二维激光扫描仪重新向现场工控机和PLC控制器传送更新的扫描数据;如果两个二维激光扫描仪均被小车遮住,首先对遮挡的区域输出无效数据,等待小车离开后,立即更新高度数据。本发明采用两台二维扫描仪可以最大限度减小扫描盲区的范围,提高测量准确度;提高扫

岸桥简易空箱吊具的应用.docx
岸桥简易空箱吊具的应用岸桥简易空箱吊具是一种非常实用的装卸工具,其主要应用于港口场地和货船上对空箱的操作。相比传统的空箱吊具,这种吊具具有结构更为简洁,作用更加灵活、高效的优点。本文将从以下几个方面深入探讨岸桥简易空箱吊具的应用。一、岸桥简易空箱吊具的结构及使用方法岸桥简易空箱吊具由主机、固定机构、抱箱臂、斜臂等组成,其主要工作原理是通过把空箱的角部夹在两个臂之间使其保持平衡。在使用过程中,先要将抱箱臂放下,再由叉臂升起来夹住箱角。在装卸完成后,将空箱放回地面并将抱箱臂折叠,收回斜臂即可。二、岸桥简易空箱
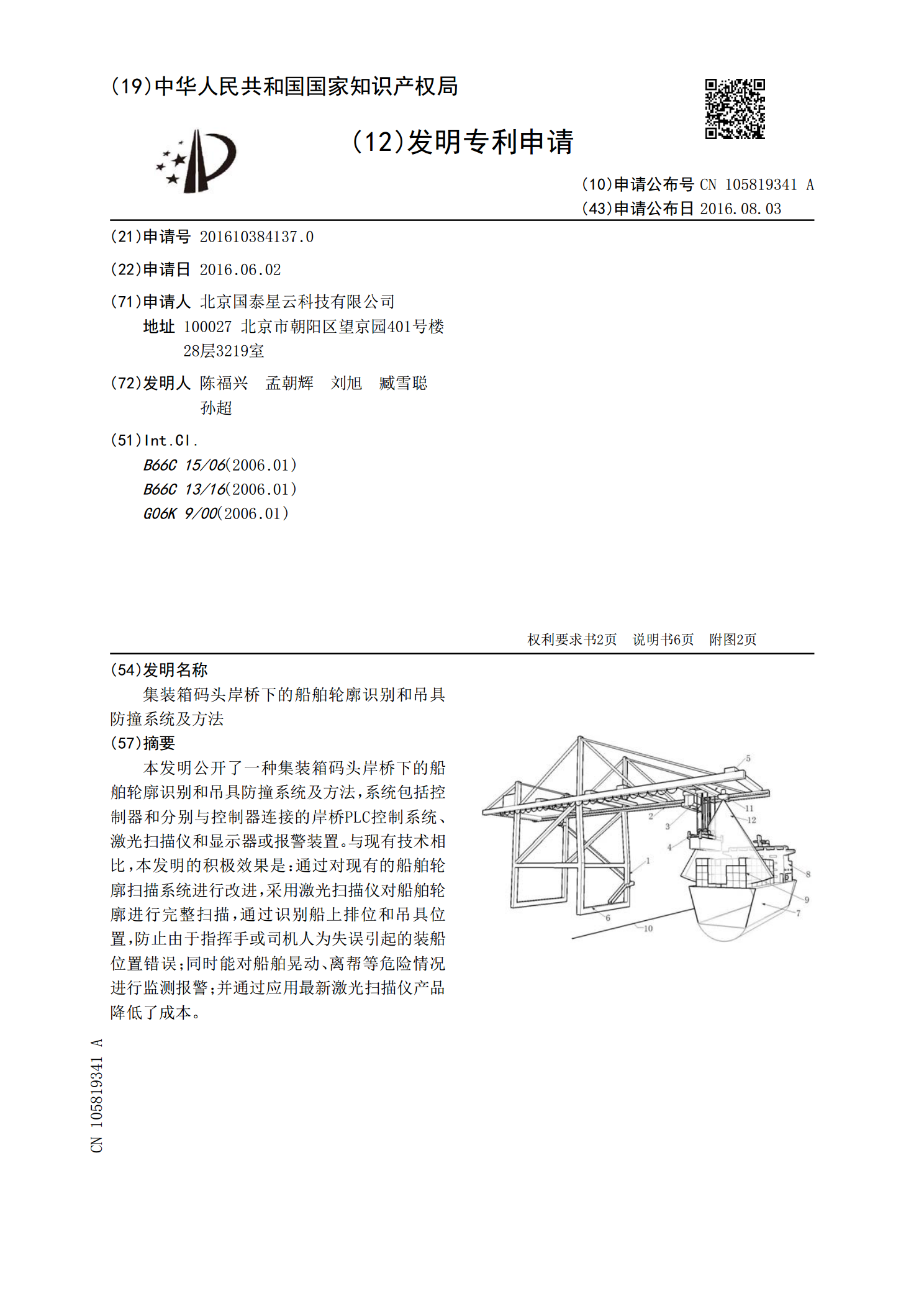
集装箱码头岸桥下的船舶轮廓识别和吊具防撞系统及方法.pdf
本发明公开了一种集装箱码头岸桥下的船舶轮廓识别和吊具防撞系统及方法,系统包括控制器和分别与控制器连接的岸桥PLC控制系统、激光扫描仪和显示器或报警装置。与现有技术相比,本发明的积极效果是:通过对现有的船舶轮廓扫描系统进行改进,采用激光扫描仪对船舶轮廓进行完整扫描,通过识别船上排位和吊具位置,防止由于指挥手或司机人为失误引起的装船位置错误;同时能对船舶晃动、离帮等危险情况进行监测报警;并通过应用最新激光扫描仪产品降低了成本。

岸桥吊具导板状态检测保护功能设计与应用.docx
岸桥吊具导板状态检测保护功能设计与应用标题:岸桥吊具导板状态检测保护功能设计与应用摘要:岸桥吊具导板作为岸桥重要的组成部分,在物流领域承担着重要的货物卸载和装载任务。为了确保岸桥吊具导板的正常运行和安全性,本文探讨了导板状态检测保护功能的设计与应用。首先,介绍了岸桥吊具导板的工作原理和重要性。然后,详细讨论了导板状态检测保护功能的设计要点,包括传感器选择、数据采集与处理、故障诊断与保护等方面。最后,通过实际案例分析,验证了导板状态检测保护功能的应用效果。本文旨在为岸桥吊具导板的运行和维护提供参考,以提高物