
一种可变位行走装置.pdf

一吃****新冬


1/10

2/10

3/10

4/10

5/10

6/10

7/10

8/10

9/10

10/10
亲,该文档总共24页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
一种可变位行走装置.pdf
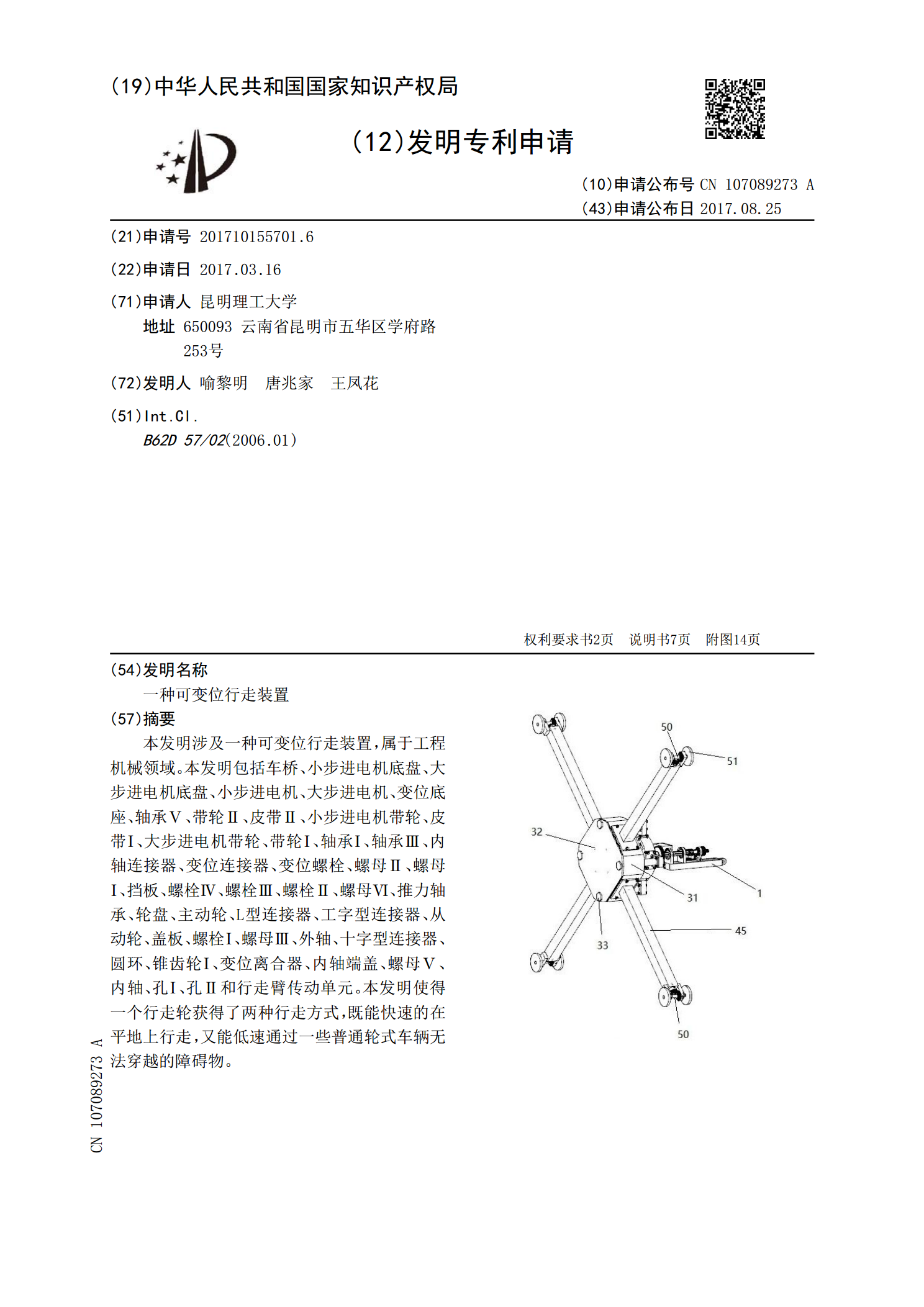
本发明涉及一种可变位行走装置,属于工程机械领域。本发明包括车桥、小步进电机底盘、大步进电机底盘、小步进电机、大步进电机、变位底座、轴承Ⅴ、带轮Ⅱ、皮带Ⅱ、小步进电机带轮、皮带Ⅰ、大步进电机带轮、带轮Ⅰ、轴承Ⅰ、轴承Ⅲ、内轴连接器、变位连接器、变位螺栓、螺母Ⅱ、螺母Ⅰ、挡板、螺栓Ⅳ、螺栓Ⅲ、螺栓Ⅱ、螺母Ⅵ、推力轴承、轮盘、主动轮、L型连接器、工字型连接器、从动轮、盖板、螺栓Ⅰ、螺母Ⅲ、外轴、十字型连接器、圆环、锥齿轮Ⅰ、变位离合器、内轴端盖、螺母Ⅴ、内轴、孔Ⅰ、孔Ⅱ和行走臂传动单元。本发明使得一个行走轮获得

一种可旋转的焊接变位装置.pdf
本发明公开了一种可旋转的焊接变位装置,属于焊接变位领域。一种可旋转的焊接变位装置,包括底板,所述底板的顶部连接有固定框,所述固定框内连接有气缸,所述气缸的输出端连接有支撑板,所述支撑板的顶部连接有连接块,所述连接块的外壁固定连接有固定轴;所述固定轴的外壁转动连接有连接件,所述连接件通过螺栓连接有放置板,所述连接件的外壁规定连接有棘轮;所述固定轴的外壁固定连接有固定环,所述固定环的外壁连接有固定块,所述固定块内转动连接有与棘轮相配合的棘爪;所述放置板上设有用于固定工件的定位机构;本发明可使工件调整不同的倾斜

一种行走装置、底盘及可移动平台.pdf
本实用新型涉及一种行走装置、底盘及可移动平台,包括第一安装架、主动行走机构、从动行走机构和传力组件;主动行走机构包括第二安装架和主动行走组件,第二安装架安装于第一安装架上,主动行走组件安装于第二安装架上;从动行走机构包括第三安装架和从动行走组件,第三安装架安装于第一安装架上,从动行走组件安装于第三安装架上;传力组件连接第二安装架和第三安装架;主动行走组件和/或从动行走组件在行走遇到异常地面时,带动安装在的第二安装架和/或第三安装架运动,运动产生的力通过传力组件在第二安装架和第三安装架之间传递,带动主动行走
一种可升降盲人辅助行走装置.pdf
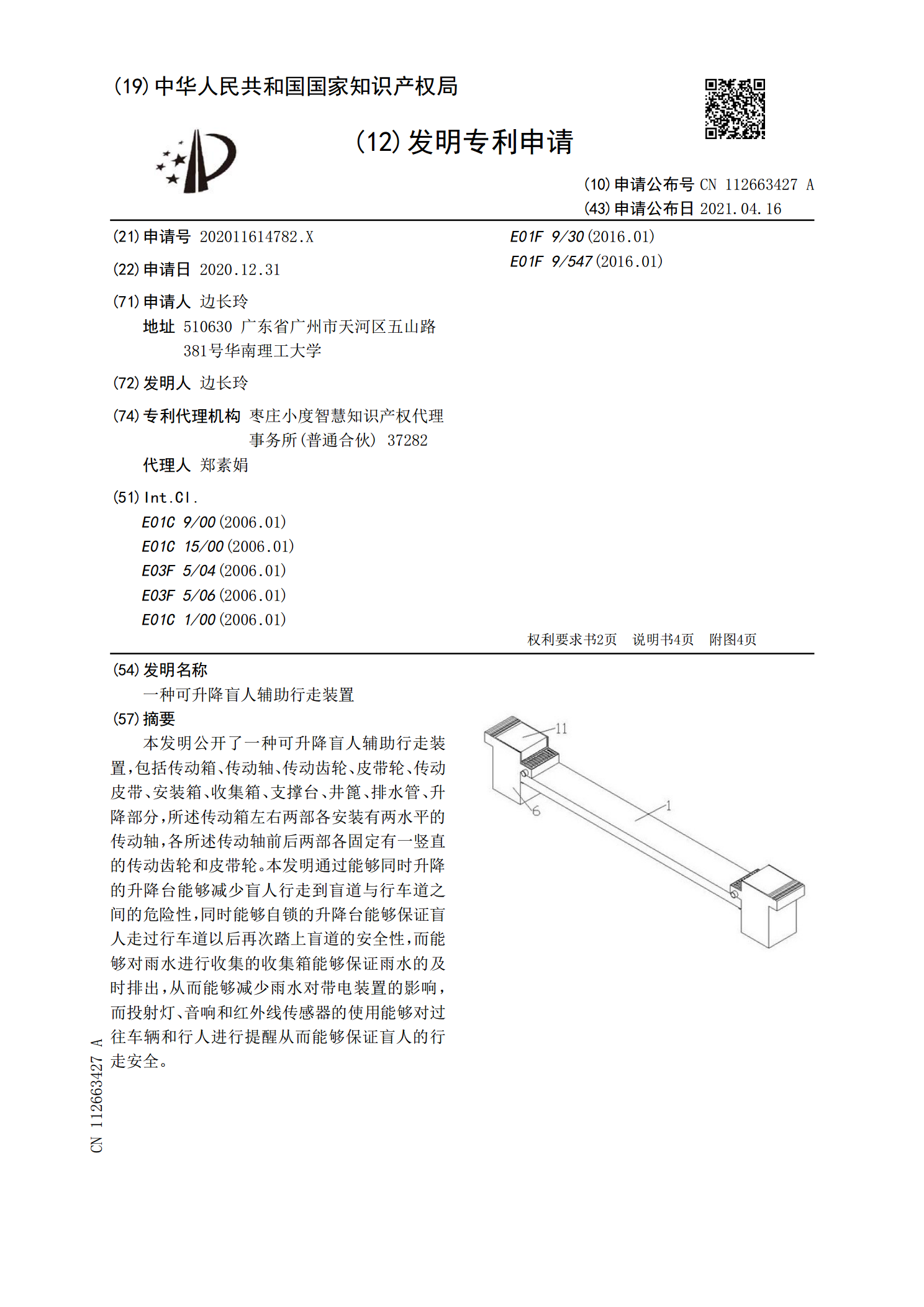
本发明公开了一种可升降盲人辅助行走装置,包括传动箱、传动轴、传动齿轮、皮带轮、传动皮带、安装箱、收集箱、支撑台、井篦、排水管、升降部分,所述传动箱左右两部各安装有两水平的传动轴,各所述传动轴前后两部各固定有一竖直的传动齿轮和皮带轮。本发明通过能够同时升降的升降台能够减少盲人行走到盲道与行车道之间的危险性,同时能够自锁的升降台能够保证盲人走过行车道以后再次踏上盲道的安全性,而能够对雨水进行收集的收集箱能够保证雨水的及时排出,从而能够减少雨水对带电装置的影响,而投射灯、音响和红外线传感器的使用能够对过往车辆和

一种导线可越障机器人行走装置.pdf
本发明提出了一种导线可越障机器人行走装置,其采用双臂三关节轮式结构,越障时双臂交替握线以避开障碍,行走时采用轮以保证行驶速度,包括前行走轮1、后行走轮2、前压紧轮3、后压紧轮4、前行走轮臂5、后行走轮臂6、前压紧轮臂7、后压紧轮臂8、四个前电机9、四个后电机10、前关节臂11、后关节臂12和本体13。本机器人行走装置可以跨越典型导线障碍如防振锤、压接管、间隔棒、悬垂线夹等,可作为高压输电线路巡线机器人以及导线除冰机器人行走装置。该平台具有机构较为简单,控制方式简单,控制精度要求较低,行走及越障速