
一种新型仿生鱼尾推进装置.pdf

猫巷****正德

1/10

2/10
3/10
4/10
5/10
6/10
7/10
8/10
9/10
10/10
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料
一种新型仿生鱼尾推进装置.pdf
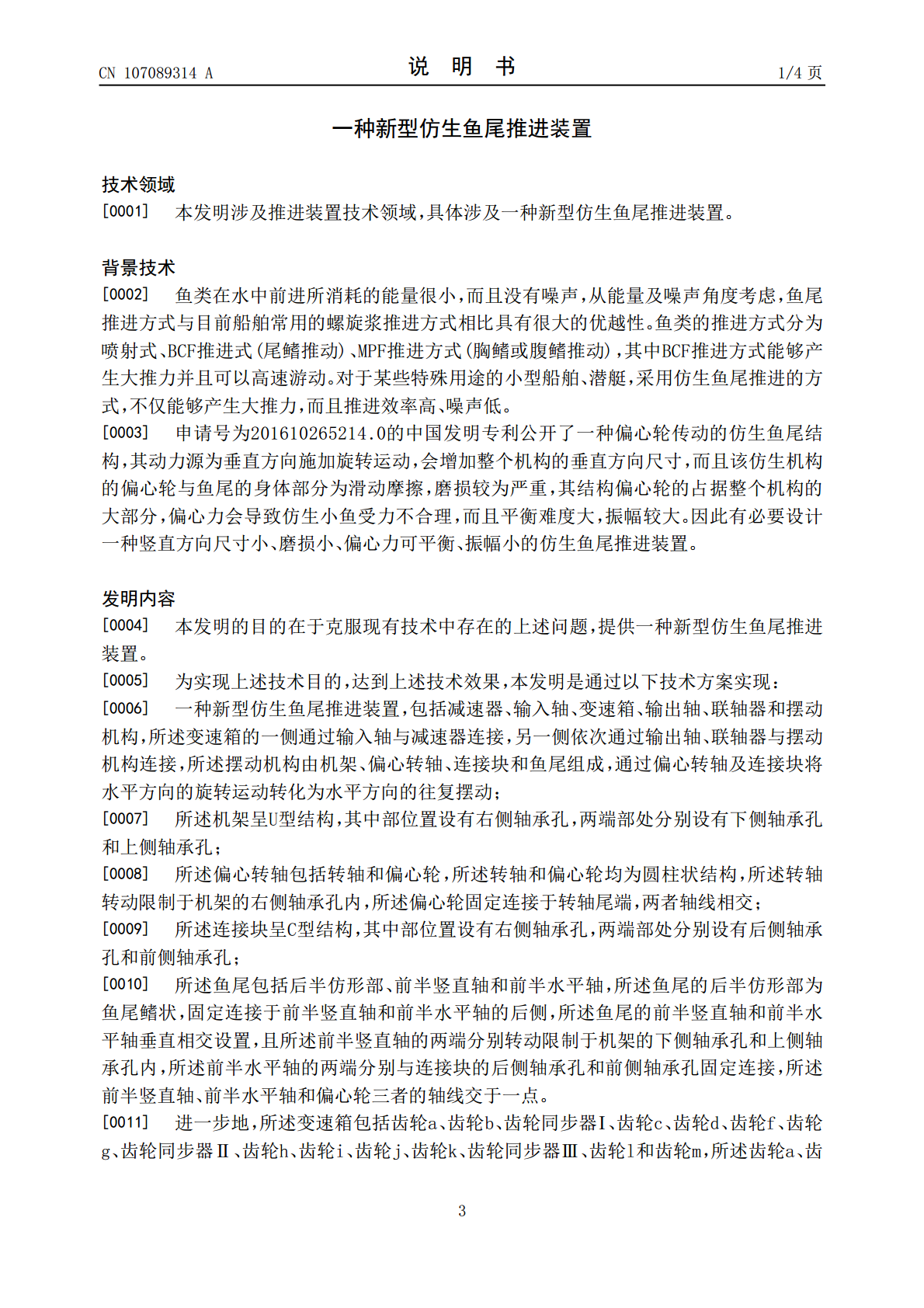
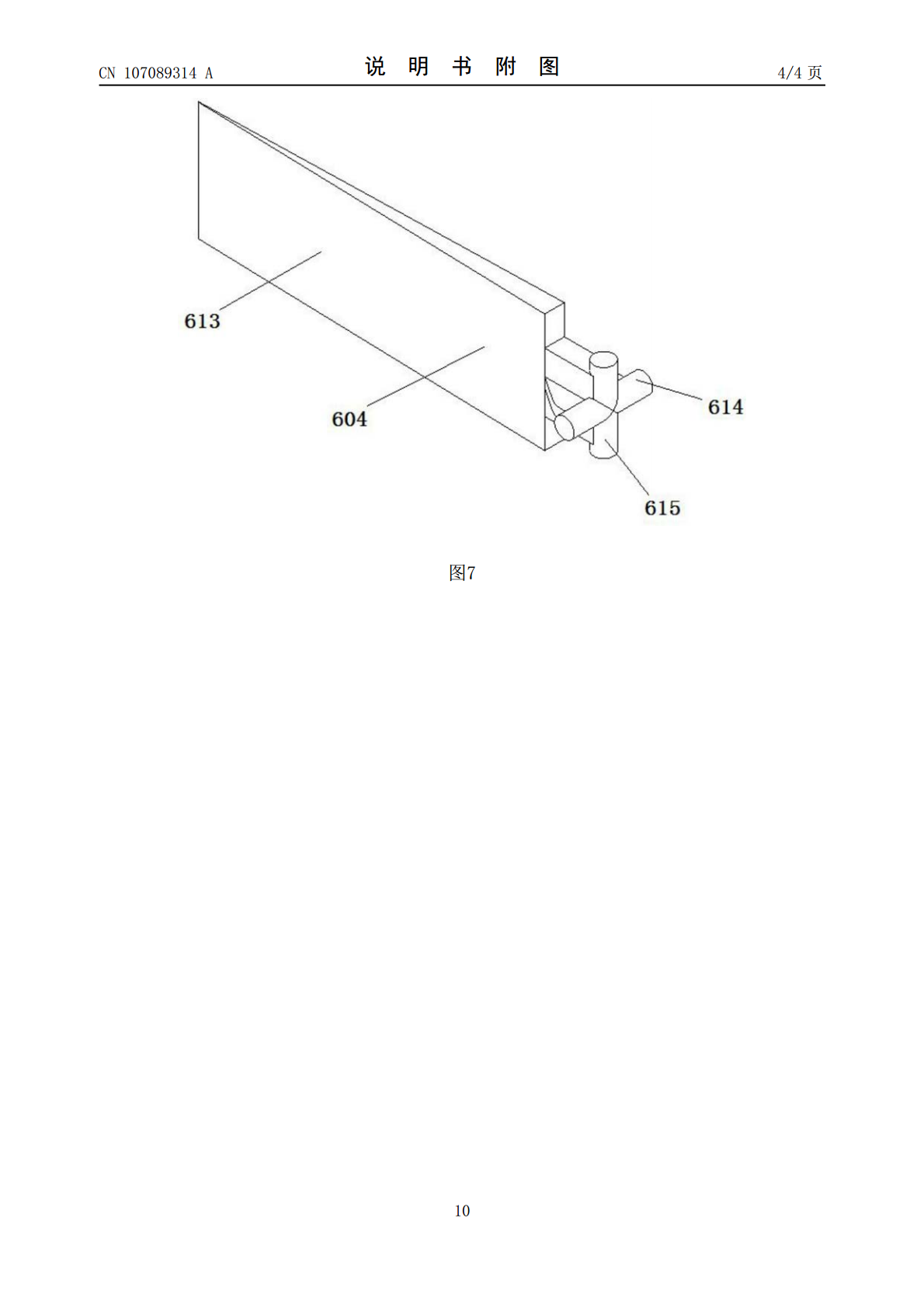
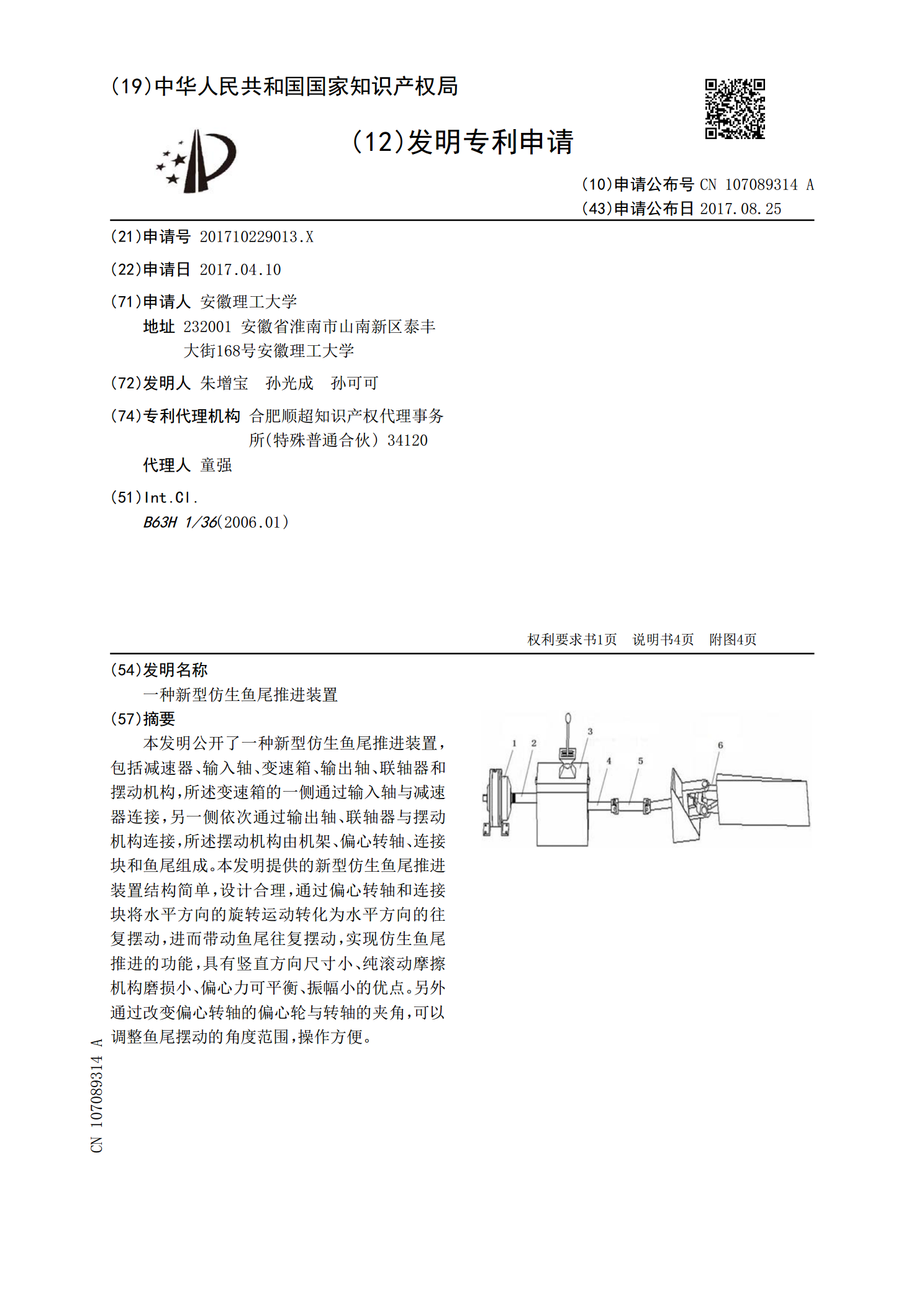
本发明公开了一种新型仿生鱼尾推进装置,包括减速器、输入轴、变速箱、输出轴、联轴器和摆动机构,所述变速箱的一侧通过输入轴与减速器连接,另一侧依次通过输出轴、联轴器与摆动机构连接,所述摆动机构由机架、偏心转轴、连接块和鱼尾组成。本发明提供的新型仿生鱼尾推进装置结构简单,设计合理,通过偏心转轴和连接块将水平方向的旋转运动转化为水平方向的往复摆动,进而带动鱼尾往复摆动,实现仿生鱼尾推进的功能,具有竖直方向尺寸小、纯滚动摩擦机构磨损小、偏心力可平衡、振幅小的优点。另外通过改变偏心转轴的偏心轮与转轴的夹角,可以调整鱼

仿生鱼尾推进装置.pdf
本发明涉及一种仿生鱼尾推进装置,包括壳体、侧臂、齿条组件、不完全齿轮、活塞滑块、缸体、仿生鱼尾,其技术要点是:所述齿条组件可滑动的限位在壳体内,齿条组件包括腰圆环形结构,该环形结构长边的内壁上各设有一齿条,环形结构两端设有条形的耳部结构,不完全齿轮限位在壳体上,并与齿条组件的其中一个齿条相啮合,耳部结构上固定有活塞滑块,活塞滑块可滑动的限位在固定于壳体端部缸体内,活塞滑块另一端固定侧臂固定,左右两侧臂之间固定有仿生鱼尾。通过不完全齿轮与齿条组件啮合传动,带动齿条组件、左右侧臂以及鱼尾实现往复摆动,仿生鱼尾
一种新型仿鱼尾的船用推进装置.pdf
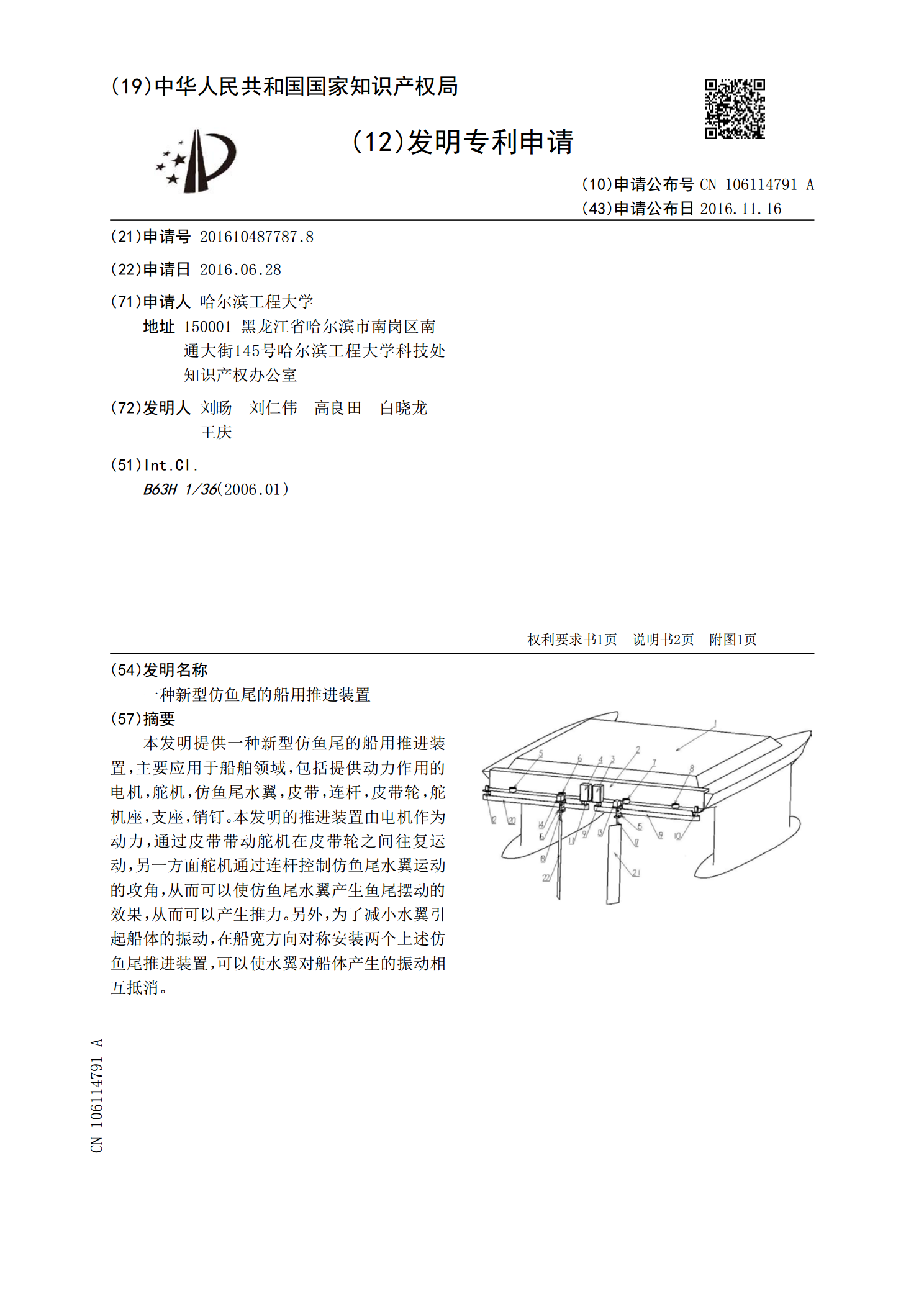
本发明提供一种新型仿鱼尾的船用推进装置,主要应用于船舶领域,包括提供动力作用的电机,舵机,仿鱼尾水翼,皮带,连杆,皮带轮,舵机座,支座,销钉。本发明的推进装置由电机作为动力,通过皮带带动舵机在皮带轮之间往复运动,另一方面舵机通过连杆控制仿鱼尾水翼运动的攻角,从而可以使仿鱼尾水翼产生鱼尾摆动的效果,从而可以产生推力。另外,为了减小水翼引起船体的振动,在船宽方向对称安装两个上述仿鱼尾推进装置,可以使水翼对船体产生的振动相互抵消。

一种仿生机器鱼尾部传动装置.pdf
本发明提供了一种仿生机器鱼尾部传动装置,属于仿生机器鱼技术领域,包括舵机、密封盖和鱼尾,还包括横向齿轮、纵向齿轮、主动臂、第一支撑台、摇块、摇臂、第二支撑台和入水传感器,所述的舵机的传动轴与横向齿轮连接,横向齿轮与纵向齿轮咬合,纵向齿轮的连接轴与主动臂连接,主动臂、摇臂和从动臂依次连接,摇臂的另一端通过摇块与鱼尾连接。本发明的有益效果为:结构简单,设计巧妙,采用曲柄摇块装置,可以实现单舵机和单关节驱动,传动效率高,控制灵敏,并且能够方便调节振幅范围和摆动角度的调整,可靠性高。
线驱动柔性仿鱼尾水下推进装置及其仿生机构.pdf
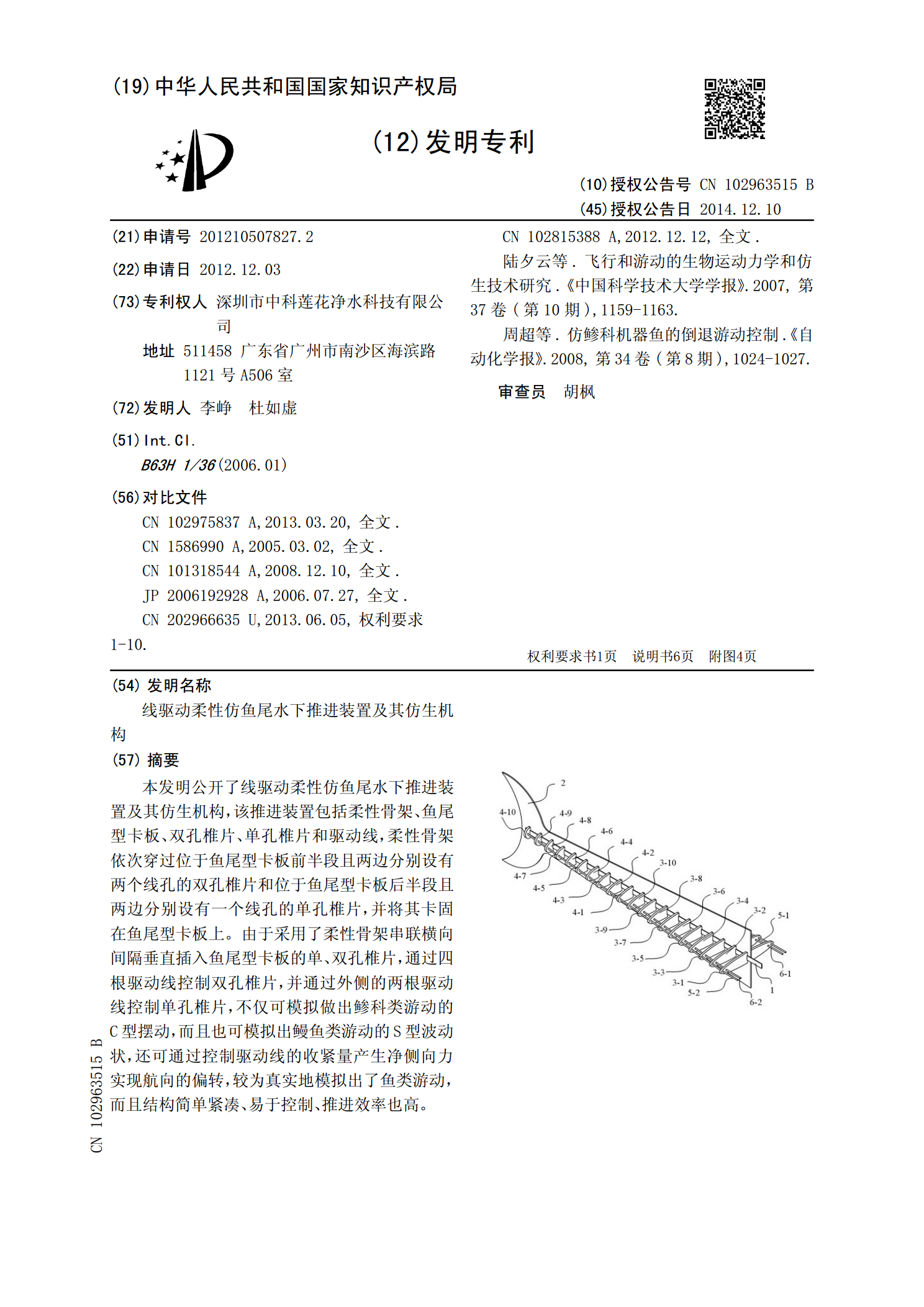
本发明公开了线驱动柔性仿鱼尾水下推进装置及其仿生机构,该推进装置包括柔性骨架、鱼尾型卡板、双孔椎片、单孔椎片和驱动线,柔性骨架依次穿过位于鱼尾型卡板前半段且两边分别设有两个线孔的双孔椎片和位于鱼尾型卡板后半段且两边分别设有一个线孔的单孔椎片,并将其卡固在鱼尾型卡板上。由于采用了柔性骨架串联横向间隔垂直插入鱼尾型卡板的单、双孔椎片,通过四根驱动线控制双孔椎片,并通过外侧的两根驱动线控制单孔椎片,不仅可模拟做出鲹科类游动的C型摆动,而且也可模拟出鳗鱼类游动的S型波动状,还可通过控制驱动线的收紧量产生净侧向力实