
车轮尺寸检测系统和方法.pdf

景山****魔王


1/10

2/10
3/10

4/10
5/10

6/10

7/10

8/10
9/10

10/10
亲,该文档总共22页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

车轮尺寸的检测方法和系统.pdf
本发明提供一种车轮尺寸的检测方法和系统,所述车轮检测方法包括:获取距离传感器与待测车辆的车轮之间的距离信息;根据所述距离信息确定所述车轮的尺寸。本发明提供的车轮尺寸的检测方法,可检测并计算待测车辆的车轮的尺寸,继而根据车轮的尺寸确定车轮的磨损情况,避免了车轮尺寸变化引发的安全事故。

车轮尺寸检测系统和方法.pdf
本发明提供了一种车轮尺寸检测系统和方法,其中,车轮尺寸检测系统包括:至少三个设置在单侧轨道的同一侧的激光位移传感器,至少两个对称设置在单侧轨道的两侧的激光位移传感器,控制器局域网络CAN采集卡和工控主机;激光位移传感器用于获取待检测车辆的车轮的坐标信息,并向CAN采集卡发送待检测车辆的车轮的坐标信息;CAN采集卡用于接收激光位移传感器获取的待检测车辆的车轮的坐标信息,并向工控主机发送待检测车辆的车轮的坐标信息;工控主机用于根据待检测车辆的车轮的坐标信息,在线计算获取车轮的尺寸。通过本发明提供的车轮尺寸的检

车轮尺寸检测系统和方法.pdf
本发明提供一种车轮尺寸检测系统和方法,所述车轮尺寸检测系统包括:至少6个距离传感器、数据采集卡和控制器,每个距离传感器与所述数据采集卡连接,所述数据采集卡与所述控制器连接;其中,至少5个距离传感器位于轨道的一侧;至少一个距离传感器位于所述轨道的另一侧,所述轨道的一侧的距离传感器中存在至少一个距离传感器,与所述轨道的另一侧的距离传感器对称设置。本发明提供的车轮尺寸的检测系统和方法,可检测并计算待测车辆的车轮的尺寸,继而根据车轮的尺寸确定车轮的磨损情况,避免了车轮尺寸变化引发的安全事故。
基于多瓣轮模型的车轮尺寸检测方法和系统.pdf
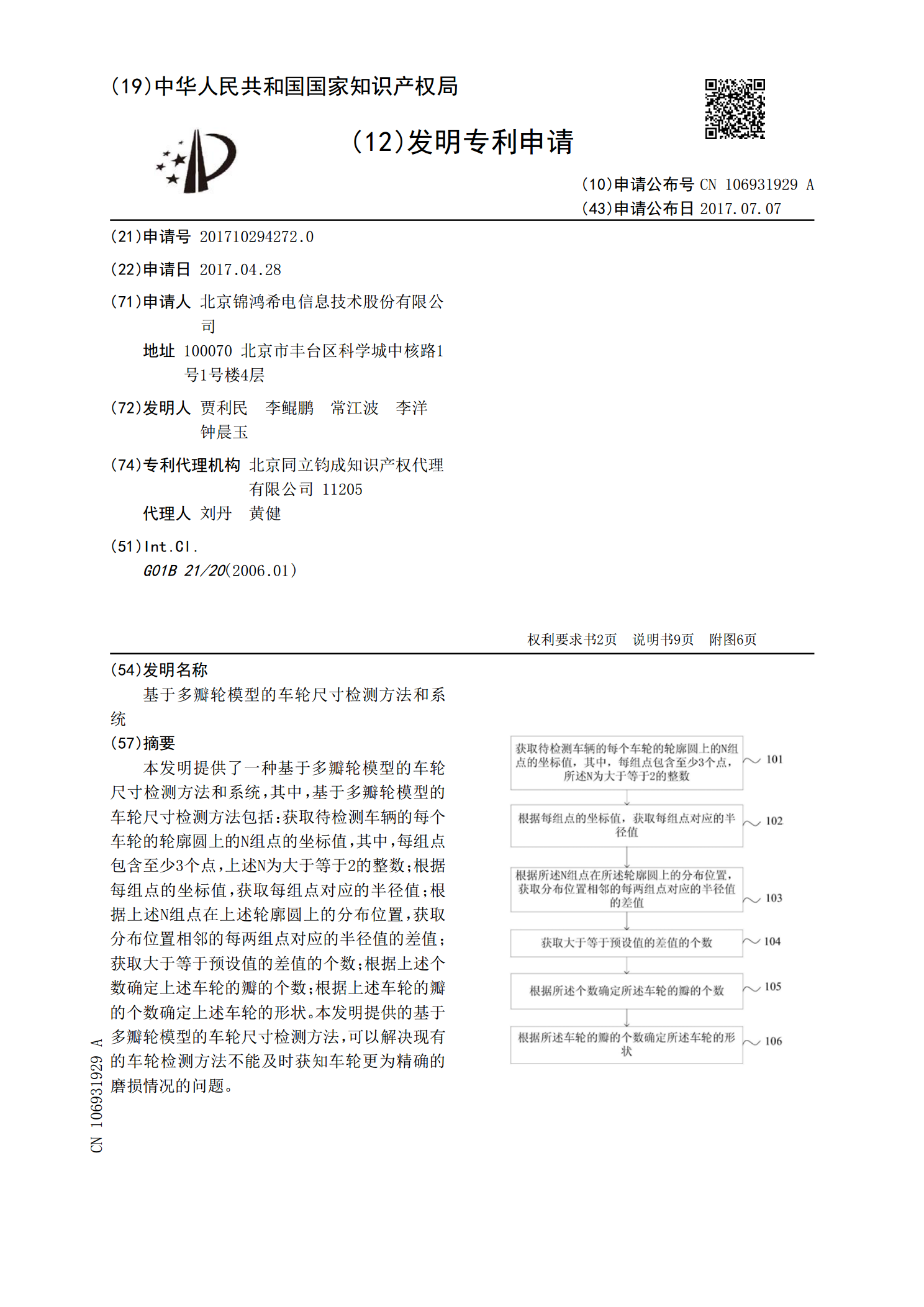
本发明提供了一种基于多瓣轮模型的车轮尺寸检测方法和系统,其中,基于多瓣轮模型的车轮尺寸检测方法包括:获取待检测车辆的每个车轮的轮廓圆上的N组点的坐标值,其中,每组点包含至少3个点,上述N为大于等于2的整数;根据每组点的坐标值,获取每组点对应的半径值;根据上述N组点在上述轮廓圆上的分布位置,获取分布位置相邻的每两组点对应的半径值的差值;获取大于等于预设值的差值的个数;根据上述个数确定上述车轮的瓣的个数;根据上述车轮的瓣的个数确定上述车轮的形状。本发明提供的基于多瓣轮模型的车轮尺寸检测方法,可以解决现有的车轮
列车轮对尺寸动态检测系统及检测方法.pdf
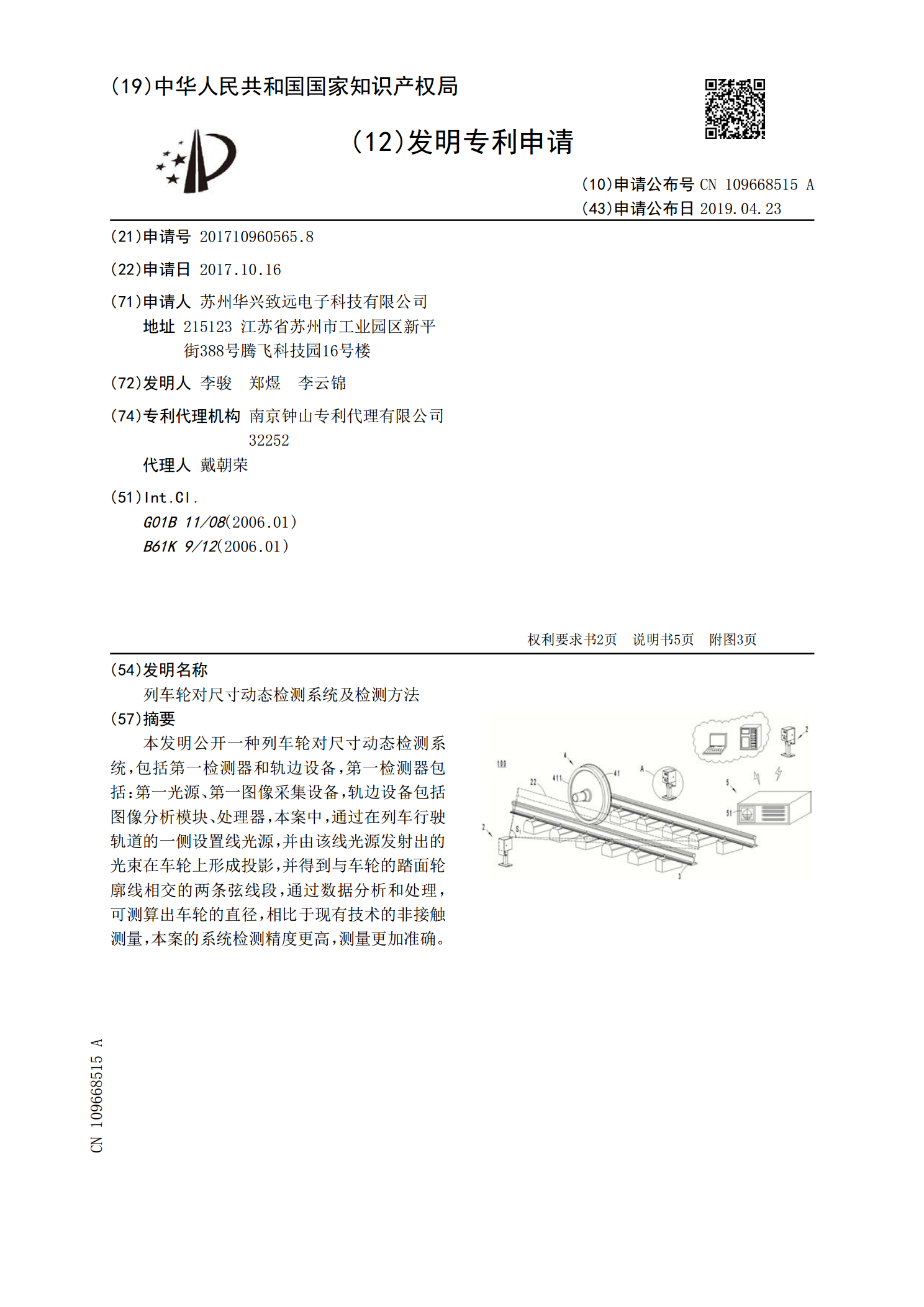
本发明公开一种列车轮对尺寸动态检测系统,包括第一检测器和轨边设备,第一检测器包括:第一光源、第一图像采集设备,轨边设备包括图像分析模块、处理器,本案中,通过在列车行驶轨道的一侧设置线光源,并由该线光源发射出的光束在车轮上形成投影,并得到与车轮的踏面轮廓线相交的两条弦线段,通过数据分析和处理,可测算出车轮的直径,相比于现有技术的非接触测量,本案的系统检测精度更高,测量更加准确。