
一种智能娱乐机器人.pdf

努力****向丝


1/10

2/10
3/10
4/10

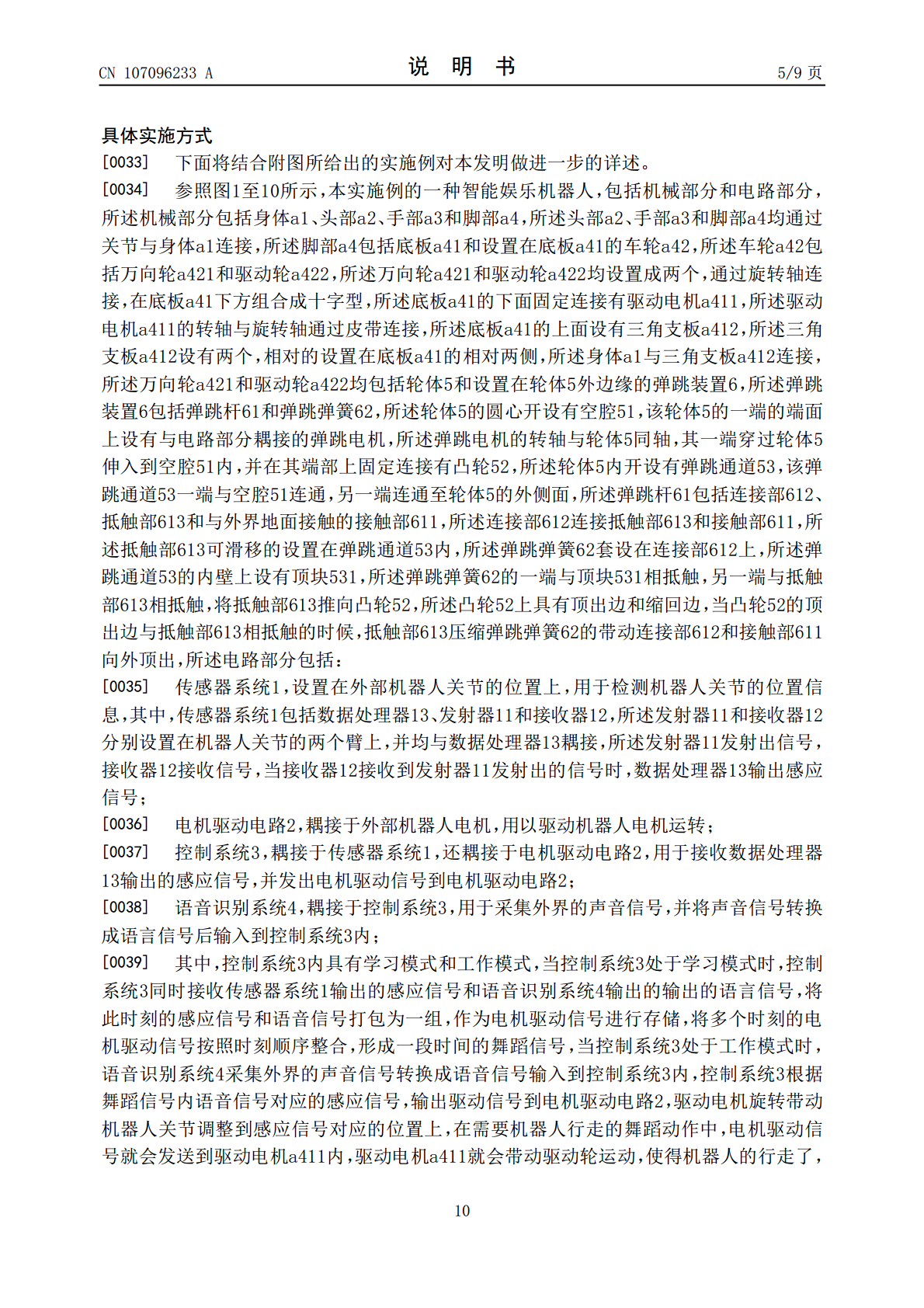
5/10
6/10
7/10

8/10

9/10
10/10
亲,该文档总共23页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
一种智能娱乐机器人.pdf
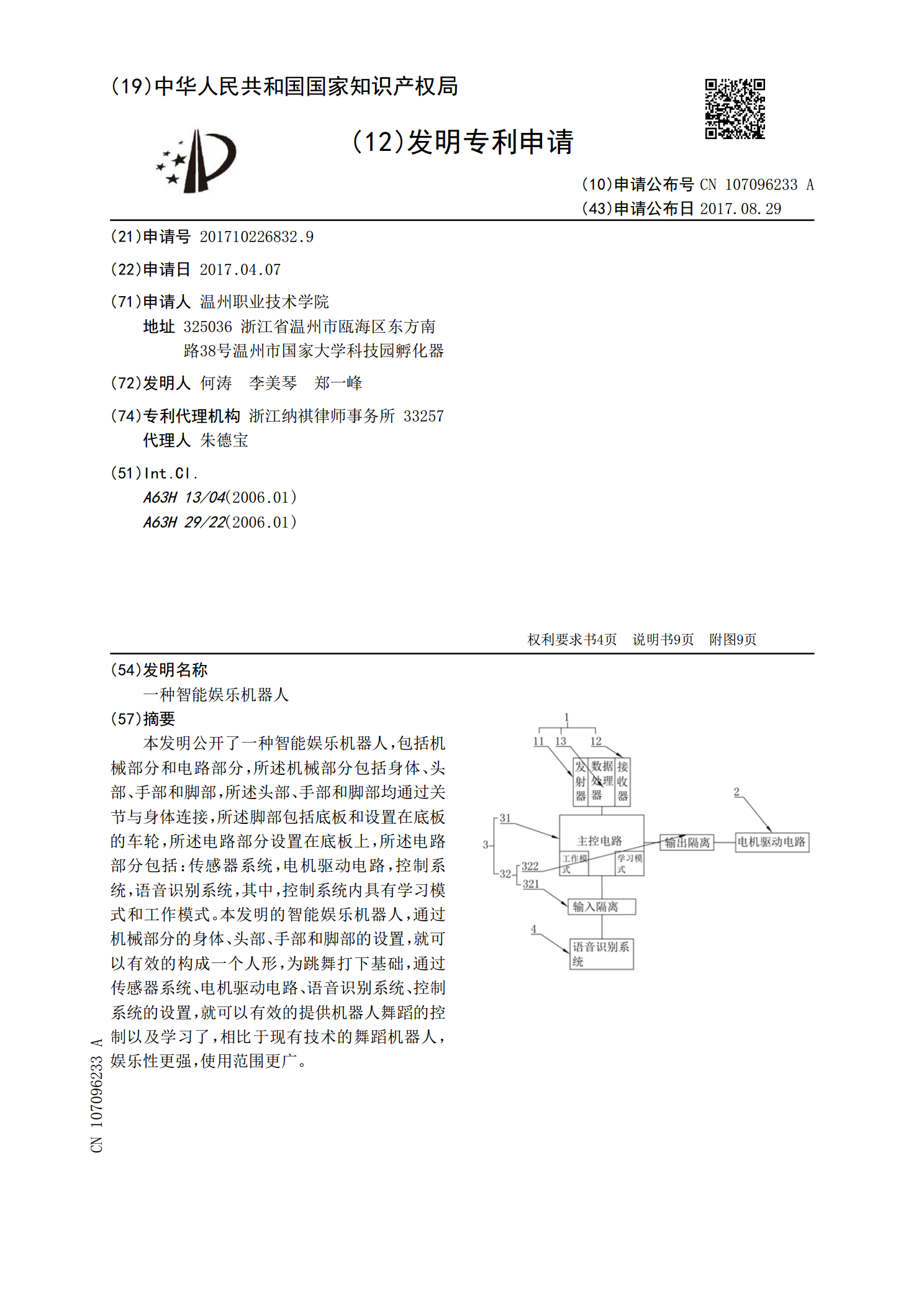
本发明公开了一种智能娱乐机器人,包括机械部分和电路部分,所述机械部分包括身体、头部、手部和脚部,所述头部、手部和脚部均通过关节与身体连接,所述脚部包括底板和设置在底板的车轮,所述电路部分设置在底板上,所述电路部分包括:传感器系统,电机驱动电路,控制系统,语音识别系统,其中,控制系统内具有学习模式和工作模式。本发明的智能娱乐机器人,通过机械部分的身体、头部、手部和脚部的设置,就可以有效的构成一个人形,为跳舞打下基础,通过传感器系统、电机驱动电路、语音识别系统、控制系统的设置,就可以有效的提供机器人舞蹈的控制

一种智能交互娱乐机器人.pdf
本发明公开了一种智能交互娱乐机器人,包括控制箱,控制箱的上方外壁上设置有头盒,且头盒的前侧镶嵌有摄像机,头盒的左、右两侧外壁上安装有语音接收器,且语音接收器的外侧壁上安装有信号天线,控制箱的左右两侧外壁上设置有旋转块,且控制箱通过外壁上的旋转块与机械臂连接,机械臂的末端上安装有手抓。本发明通过设置中央处理芯片、摄像机,中央处理芯片采用Arduino系列核心芯片,兼容主芯片Xilinx‑XC6SLX9,实现对各模块的数据传递与控制,设置具有三方位云台和补光灯的高清摄像机,能够使摄像头实现左右、上下、前后方向

一种儿童娱乐智能机器人.pdf
本发明公开了一种儿童娱乐智能机器人,包括头部壳体模块、人机交互模块、供能模块和底座壳体模块,所述头部壳体模块包括后盖、保护罩、喇叭网和硅胶塞,所述后盖、保护罩和所述喇叭网依次卡合连接,所述后盖、保护罩和所述喇叭网上均开设有滑槽,所述后盖底部内壁可拆卸连接有压片,所述压片上具有卡槽,所述硅胶塞贯穿所述滑槽与所述压片连接;在后盖内侧设置带有卡槽的压片,端盖在后盖外侧安装时,将带有弹性弹片的硅胶塞卡合在压片上的卡槽中,仅靠弹片与型材之间的摩擦力紧固端盖,在装置组装过程中更具有效率,不仅减少了复杂的工序,减少螺钉
一种娱乐仿人智能机器人.pdf
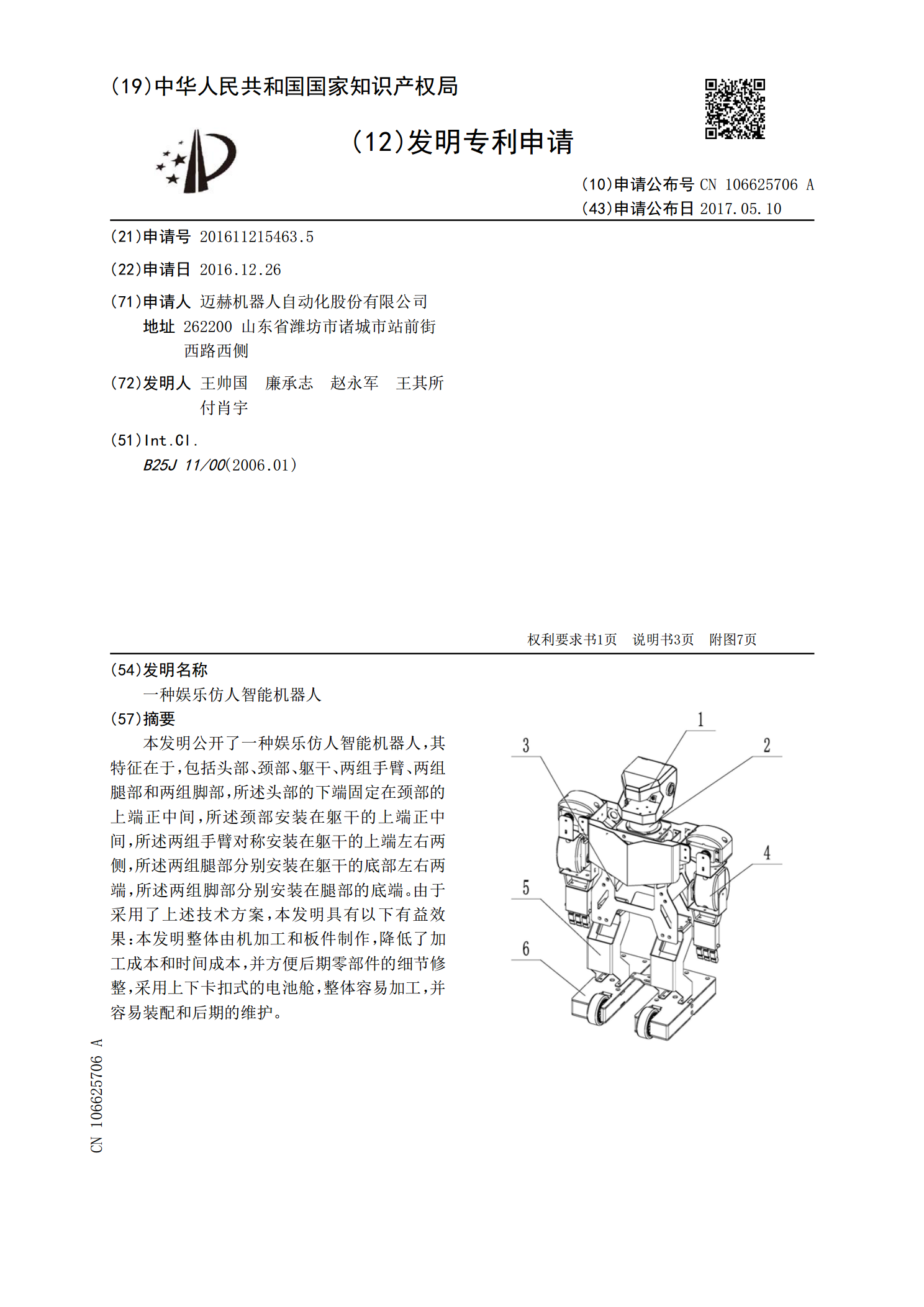
本发明公开了一种娱乐仿人智能机器人,其特征在于,包括头部、颈部、躯干、两组手臂、两组腿部和两组脚部,所述头部的下端固定在颈部的上端正中间,所述颈部安装在躯干的上端正中间,所述两组手臂对称安装在躯干的上端左右两侧,所述两组腿部分别安装在躯干的底部左右两端,所述两组脚部分别安装在腿部的底端。由于采用了上述技术方案,本发明具有以下有益效果:本发明整体由机加工和板件制作,降低了加工成本和时间成本,并方便后期零部件的细节修整,采用上下卡扣式的电池舱,整体容易加工,并容易装配和后期的维护。

一种多功能智能娱乐机器人.pdf
本发明提供了一种多功能智能娱乐机器人,属于机器人领域,包括主机,主机包括可拆卸连接的左机体及右机体,左机体朝向右机体的一侧设置有弧形槽,右机体朝向左机体的一侧也设置有弧形槽,左机体上设置有第一连接轴及第二连接轴,第一连接轴上设置有第一驱动器,第二连接轴上设置有第二驱动器,右机体上设置有第三连接轴及第四连接轴,第三连接轴上连接有第三驱动器,第四连接轴上设置有第四驱动器;左机体及右机体内均设置有蓄电池,左机体及右机体之间连接有两根连接带。这种机器人能够飞行使用,也可能在水中使用,功能多样,能够给使用者带来更多