
基于数据融合的车辆防滑控制系统与防滑控制方法.pdf

运升****魔王


1/10

2/10
3/10

4/10

5/10

6/10

7/10

8/10

9/10
10/10
亲,该文档总共14页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
基于数据融合的车辆防滑控制系统与防滑控制方法.pdf
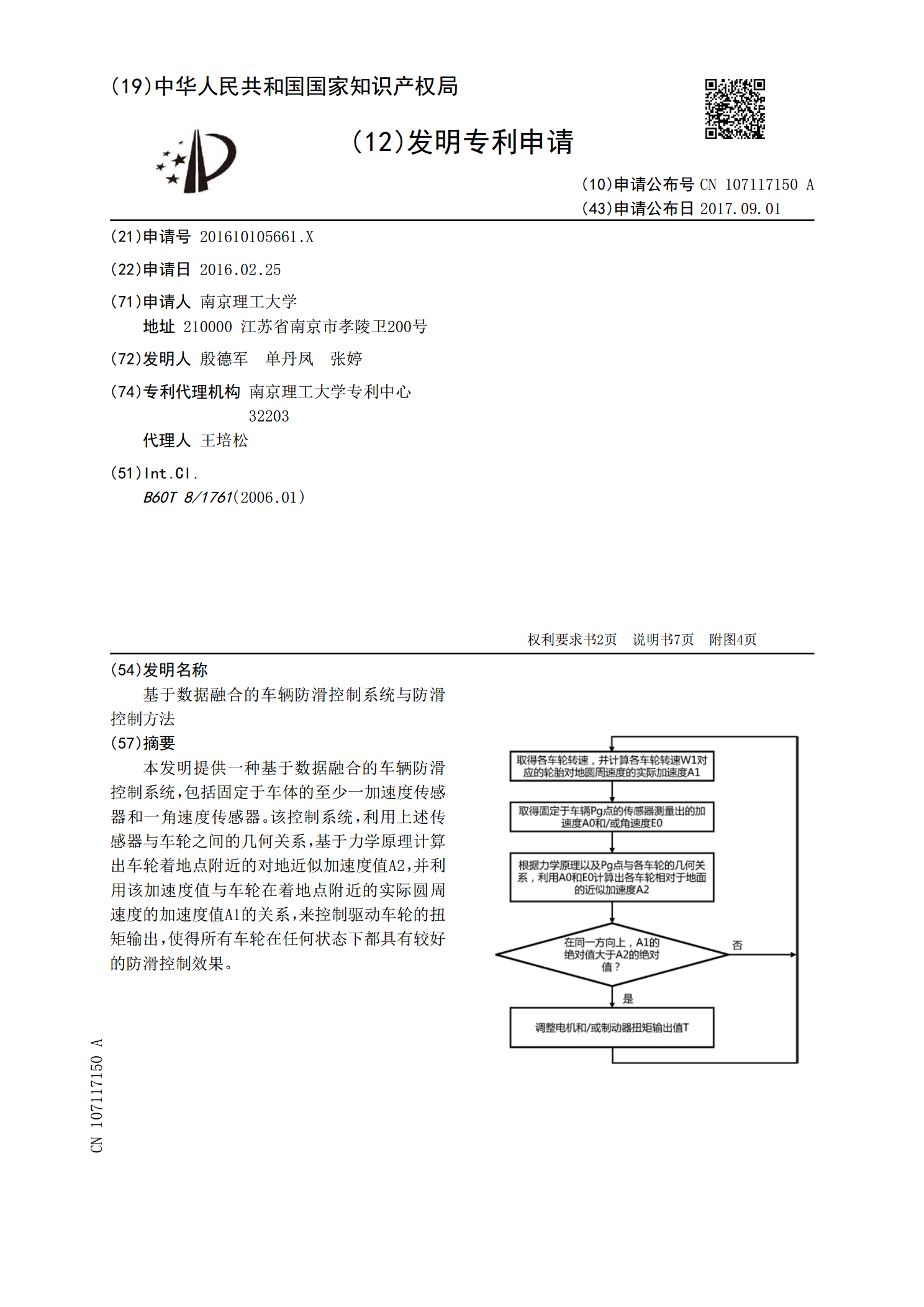
本发明提供一种基于数据融合的车辆防滑控制系统,包括固定于车体的至少一加速度传感器和一角速度传感器。该控制系统,利用上述传感器与车轮之间的几何关系,基于力学原理计算出车轮着地点附近的对地近似加速度值A2,并利用该加速度值与车轮在着地点附近的实际圆周速度的加速度值A1的关系,来控制驱动车轮的扭矩输出,使得所有车轮在任何状态下都具有较好的防滑控制效果。

高鲁棒性车轮防滑控制方法、防滑控制系统及车辆.pdf
本发明提供一种高鲁棒性的车轮防滑控制系统。该控制系统,利用各车轮的角速度,对其微分得到角加速度,结合驱动各车轮的扭矩值,利用车轮动力学方程计算各车轮受到的驱动力,并结合各车轮中心的加速度及调节因子计算得到各车轮的约束扭矩。通过比较上层扭矩输出请求值及约束扭矩数值,来控制驱动车轮的扭矩输出,使得所有车轮在任何状态下都具有较好的防滑控制效果。
车辆及其防滑系统和防滑控制方法.pdf
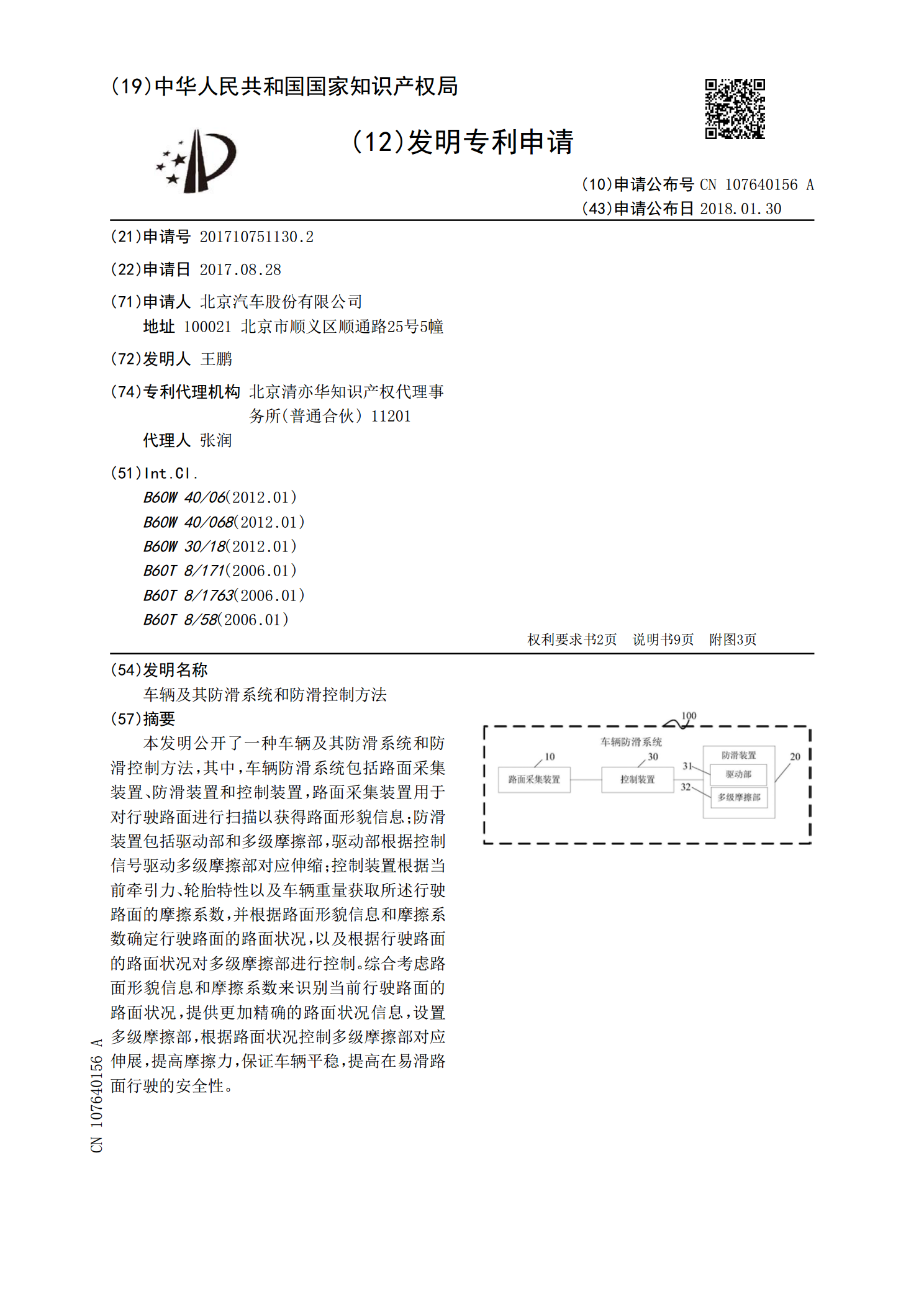
本发明公开了一种车辆及其防滑系统和防滑控制方法,其中,车辆防滑系统包括路面采集装置、防滑装置和控制装置,路面采集装置用于对行驶路面进行扫描以获得路面形貌信息;防滑装置包括驱动部和多级摩擦部,驱动部根据控制信号驱动多级摩擦部对应伸缩;控制装置根据当前牵引力、轮胎特性以及车辆重量获取所述行驶路面的摩擦系数,并根据路面形貌信息和摩擦系数确定行驶路面的路面状况,以及根据行驶路面的路面状况对多级摩擦部进行控制。综合考虑路面形貌信息和摩擦系数来识别当前行驶路面的路面状况,提供更加精确的路面状况信息,设置多级摩擦部,根

车辆的防滑控制方法、系统及车辆.pdf
本发明公开了一种车辆的防滑控制方法、系统及车辆,其中,车辆为轮边电机驱动的车辆,车辆的每个车轮对应设置一个轮边电机,所述方法包括以下步骤:获取每个车轮的滑移率和角加速度;根据每个车轮的滑移率和/或角加速度判断是否有车轮处于打滑状态;如果有车轮处于打滑状态,则调节处于打滑状态的车轮所对应的轮边电机的需求扭矩,以对车辆进行防滑控制。根据本发明的方法,不仅实现起来简单方便,而且能够更为准确地判断车辆的打滑情况,并在车辆出现打滑情况时,快速地进行防滑控制,从而有效地保证了车辆的稳定性和安全性。

无需轮速信息的车辆防滑控制方法、控制系统以及车辆.pdf
本发明提供一种无需轮速信息的车辆防滑控制系统。该控制系统,利用各车轮中心的加速度和驱动扭矩数值,根据车辆动力学方程计算出各车轮的估计角加速度