
一种具有可卷绕脚蹼的机器人脚掌.pdf

韶敏****ab

1/9
2/9
3/9
4/9
5/9
6/9
7/9
8/9
9/9
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料
一种具有可卷绕脚蹼的机器人脚掌.pdf
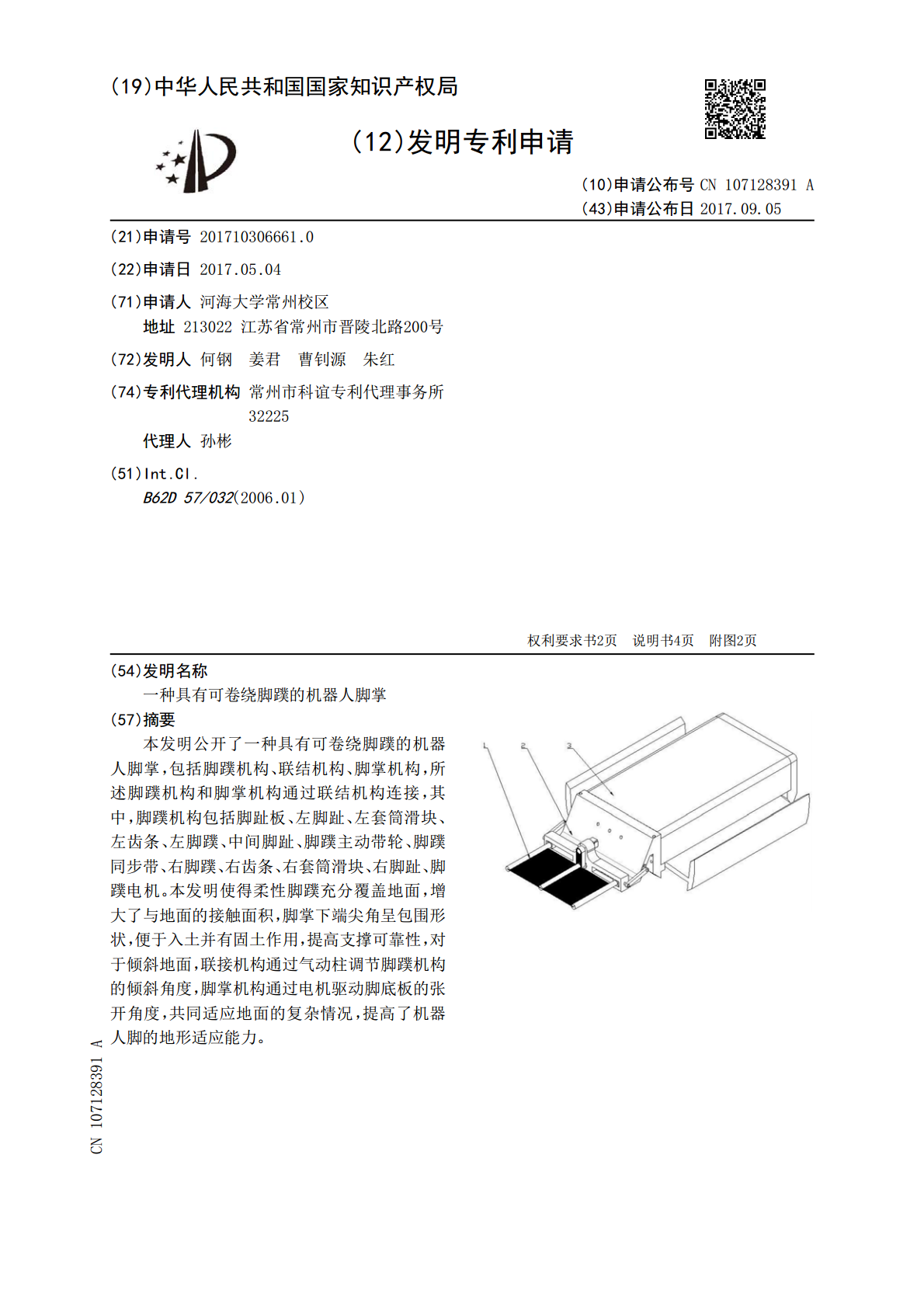
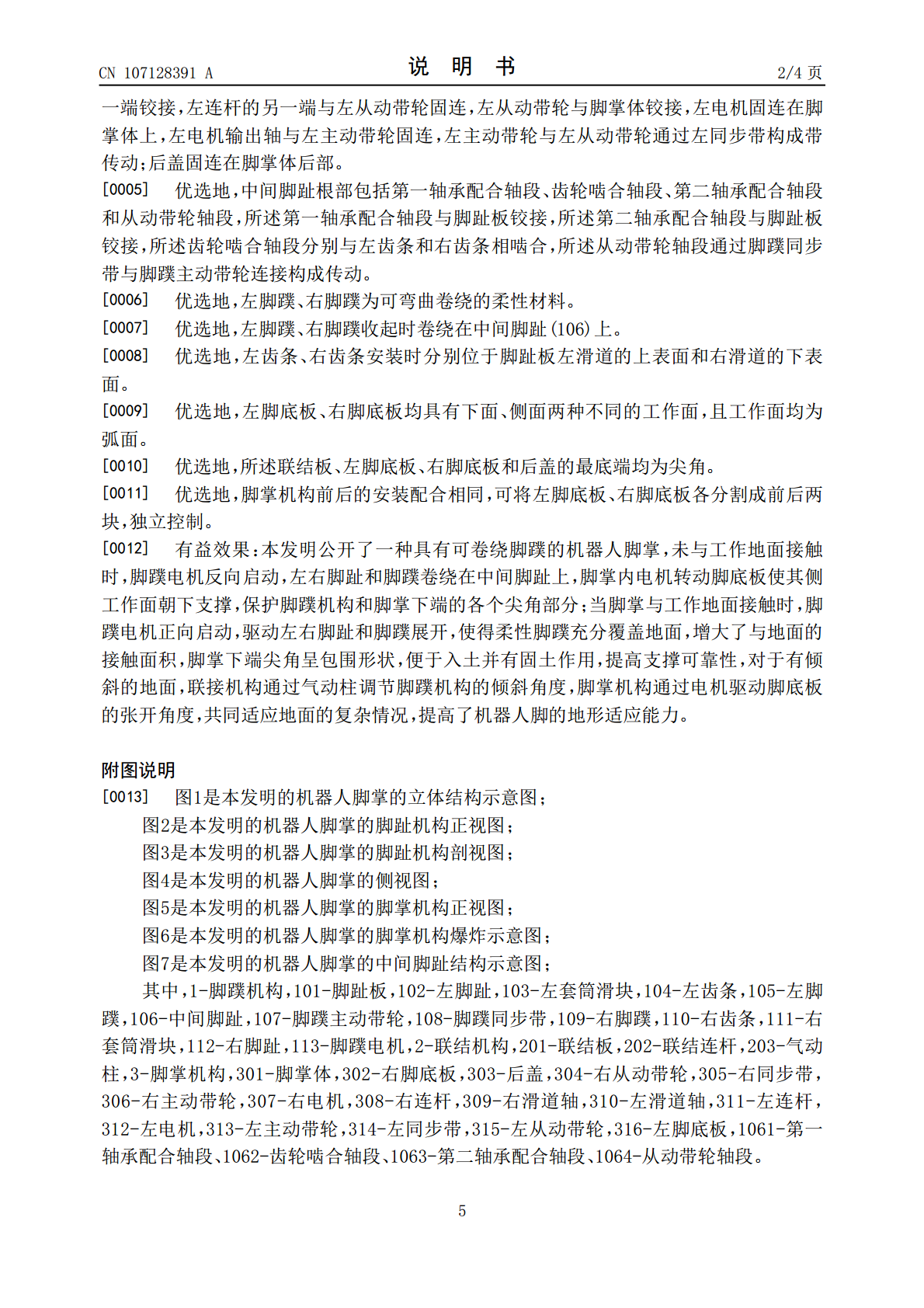
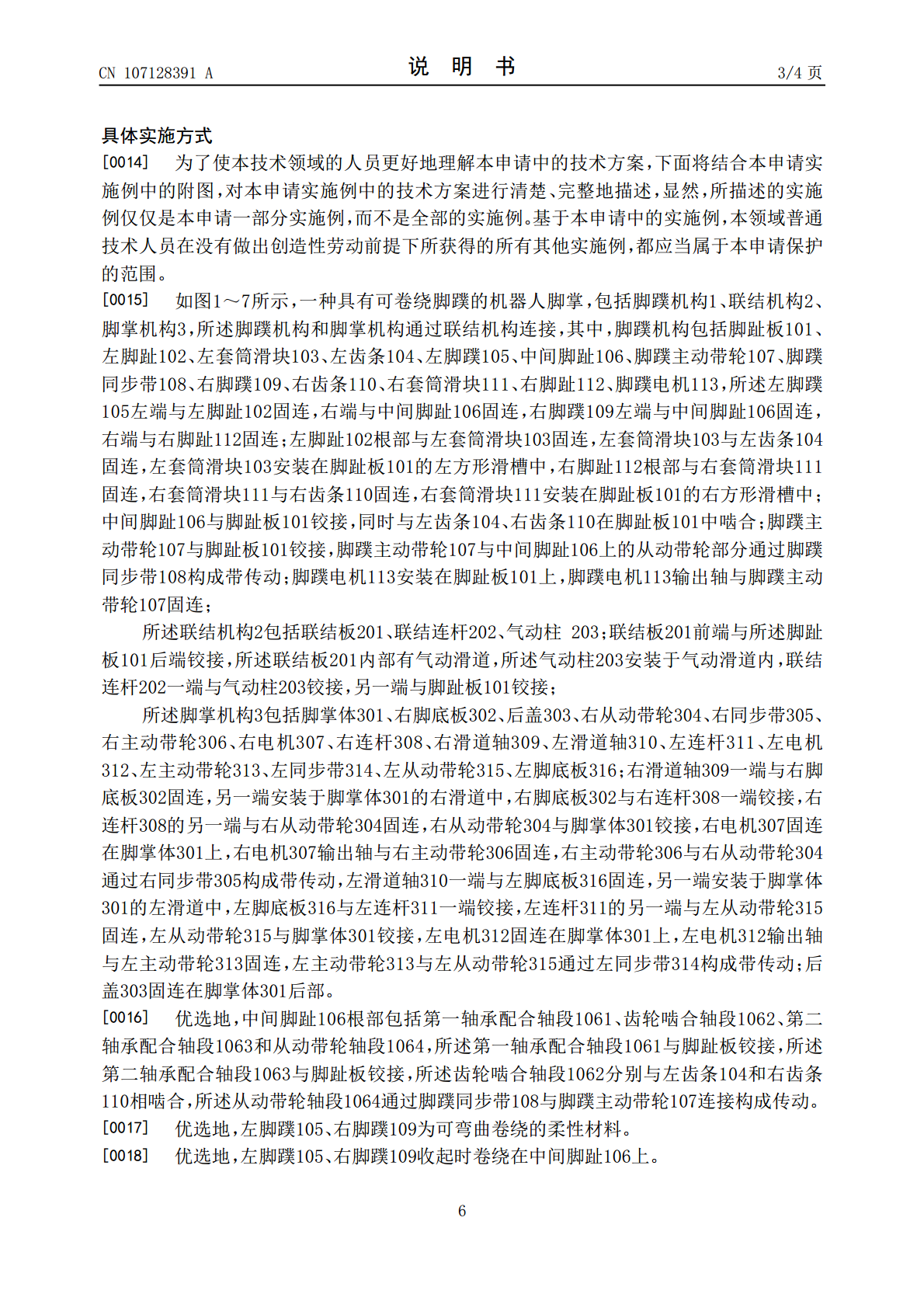
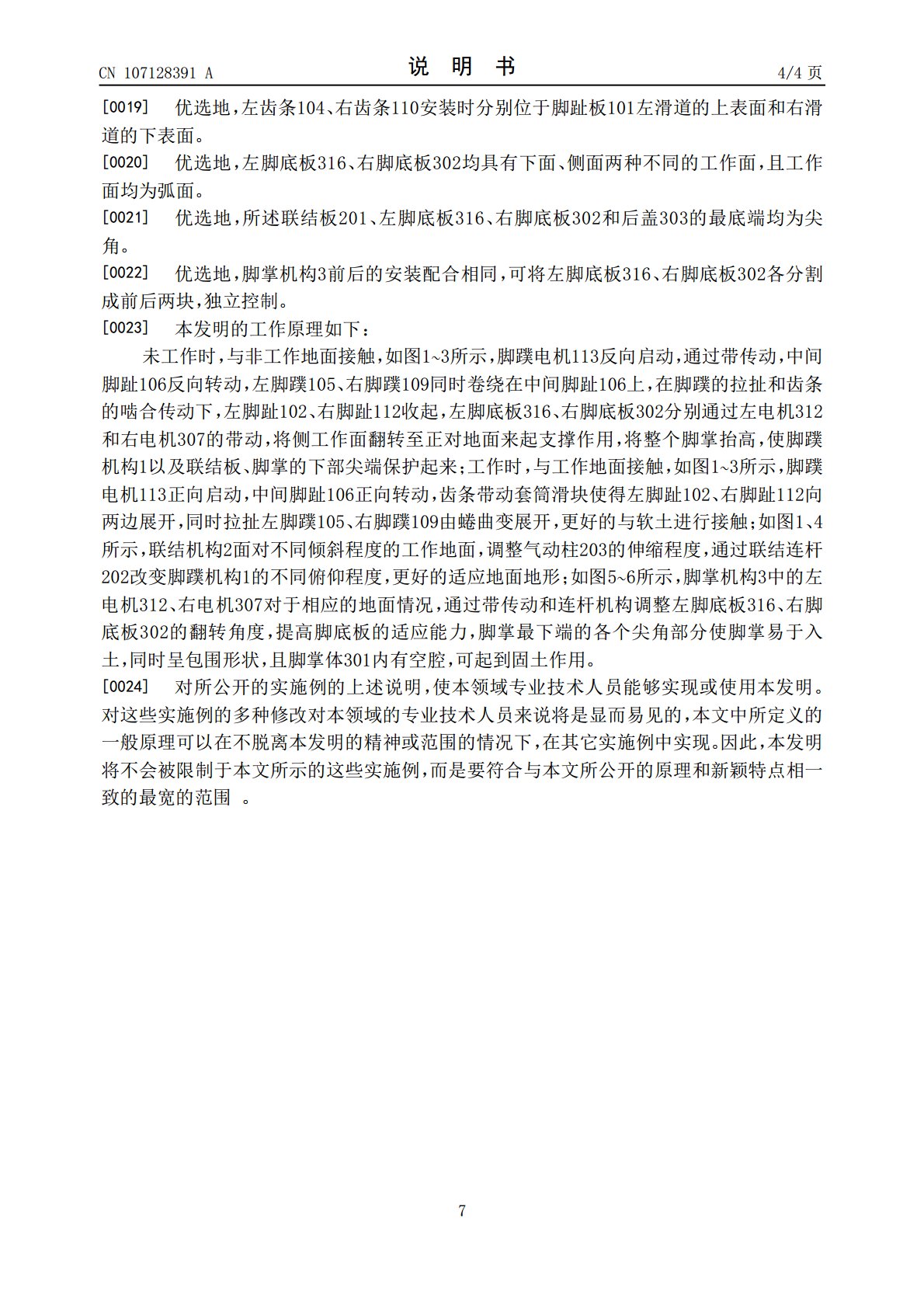
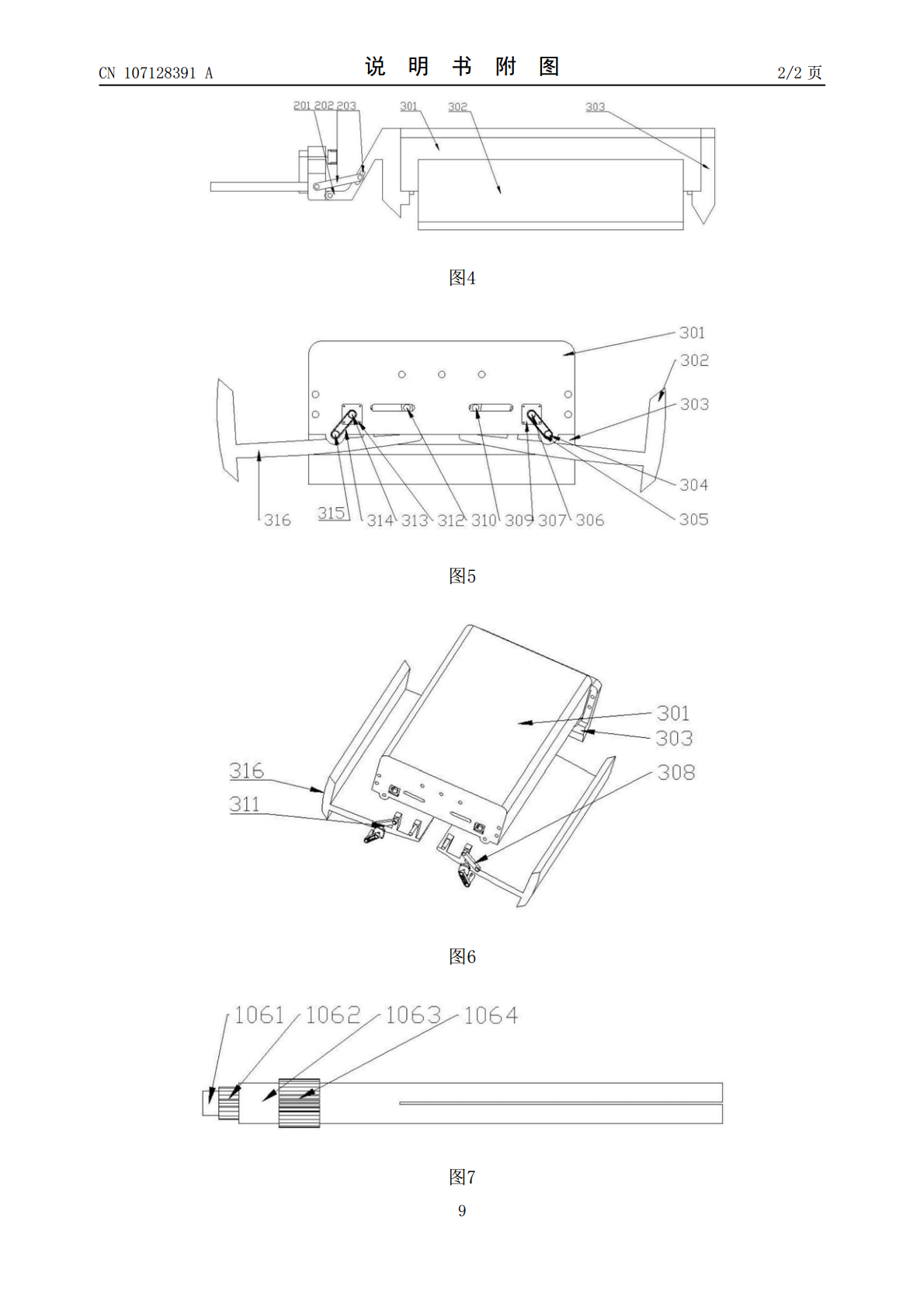
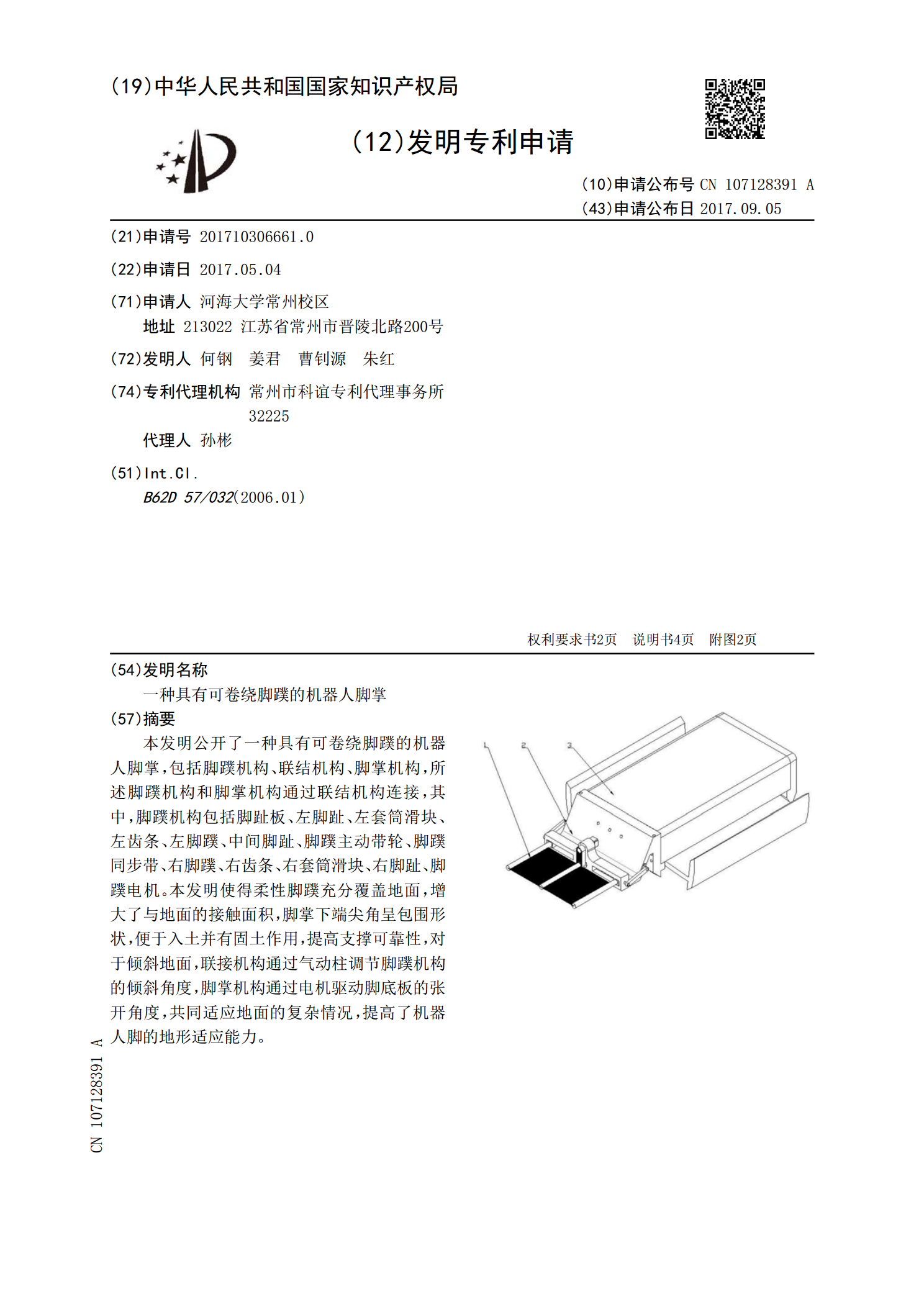
本发明公开了一种具有可卷绕脚蹼的机器人脚掌,包括脚蹼机构、联结机构、脚掌机构,所述脚蹼机构和脚掌机构通过联结机构连接,其中,脚蹼机构包括脚趾板、左脚趾、左套筒滑块、左齿条、左脚蹼、中间脚趾、脚蹼主动带轮、脚蹼同步带、右脚蹼、右齿条、右套筒滑块、右脚趾、脚蹼电机。本发明使得柔性脚蹼充分覆盖地面,增大了与地面的接触面积,脚掌下端尖角呈包围形状,便于入土并有固土作用,提高支撑可靠性,对于倾斜地面,联接机构通过气动柱调节脚蹼机构的倾斜角度,脚掌机构通过电机驱动脚底板的张开角度,共同适应地面的复杂情况,提高了机器人
一种脚蹼可伸缩的机器人脚掌结构.pdf
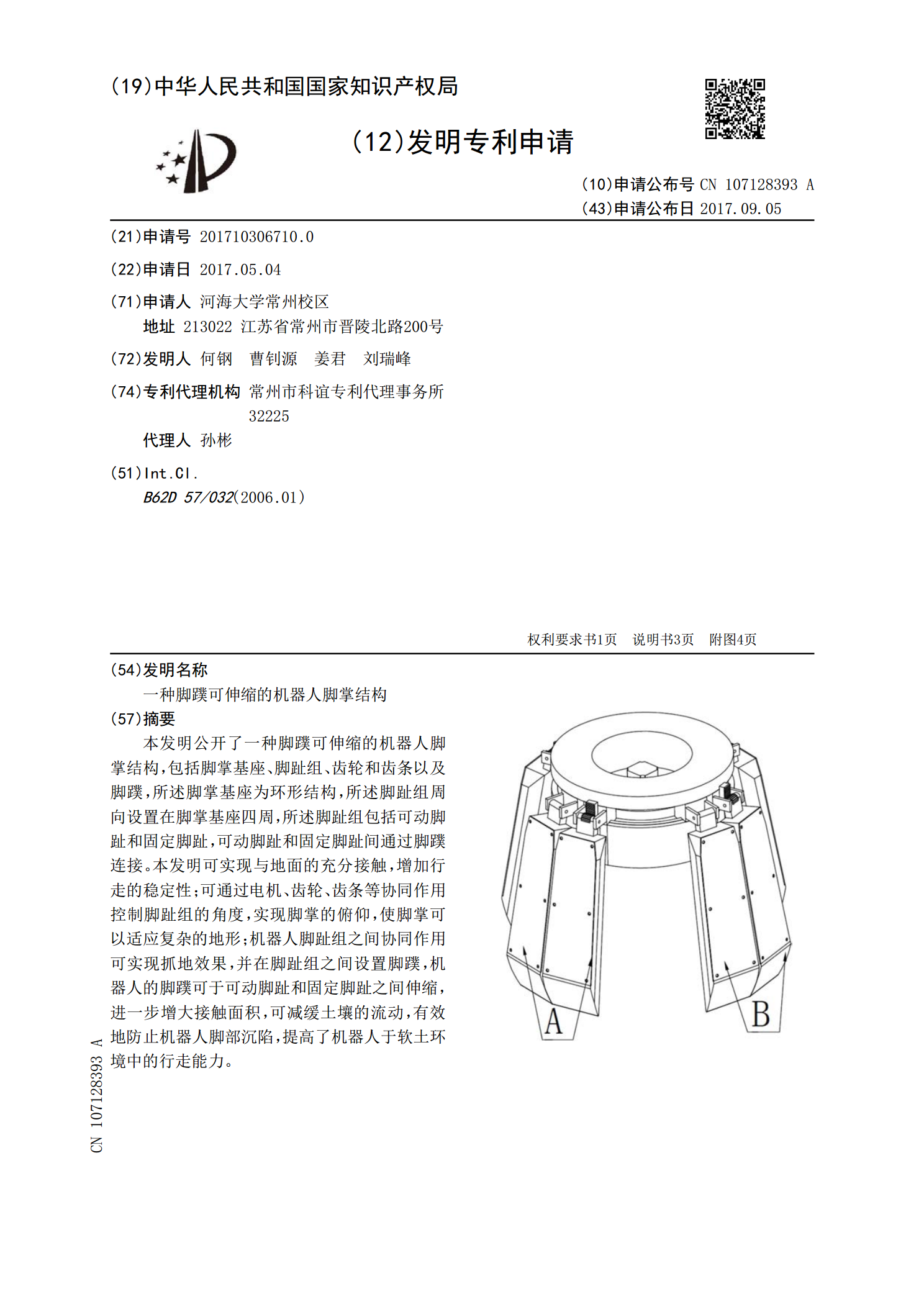
本发明公开了一种脚蹼可伸缩的机器人脚掌结构,包括脚掌基座、脚趾组、齿轮和齿条以及脚蹼,所述脚掌基座为环形结构,所述脚趾组周向设置在脚掌基座四周,所述脚趾组包括可动脚趾和固定脚趾,可动脚趾和固定脚趾间通过脚蹼连接。本发明可实现与地面的充分接触,增加行走的稳定性;可通过电机、齿轮、齿条等协同作用控制脚趾组的角度,实现脚掌的俯仰,使脚掌可以适应复杂的地形;机器人脚趾组之间协同作用可实现抓地效果,并在脚趾组之间设置脚蹼,机器人的脚蹼可于可动脚趾和固定脚趾之间伸缩,进一步增大接触面积,可减缓土壤的流动,有效地防止机
一种具有可折叠脚趾的机器人脚掌结构.pdf
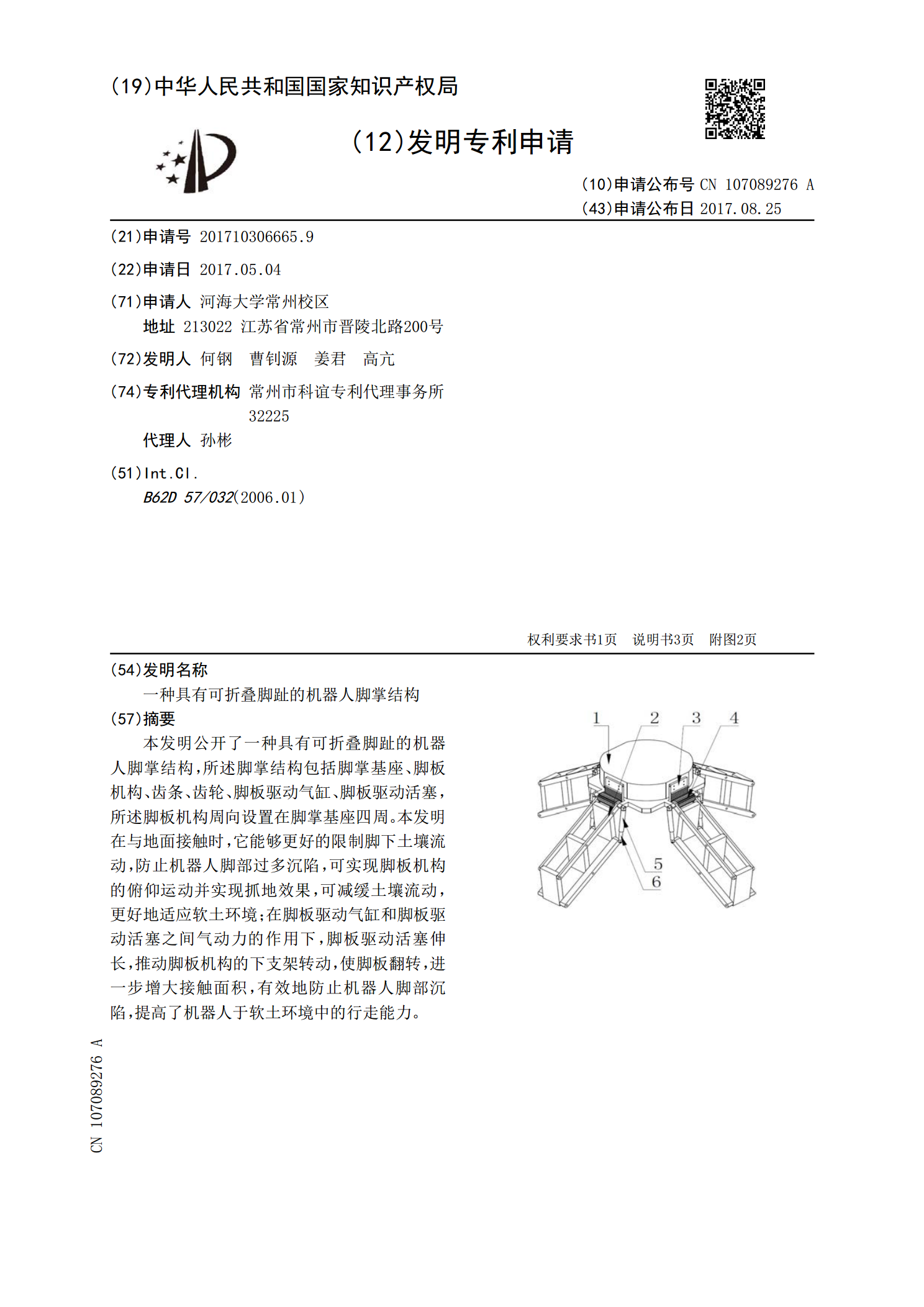
本发明公开了一种具有可折叠脚趾的机器人脚掌结构,所述脚掌结构包括脚掌基座、脚板机构、齿条、齿轮、脚板驱动气缸、脚板驱动活塞,所述脚板机构周向设置在脚掌基座四周。本发明在与地面接触时,它能够更好的限制脚下土壤流动,防止机器人脚部过多沉陷,可实现脚板机构的俯仰运动并实现抓地效果,可减缓土壤流动,更好地适应软土环境;在脚板驱动气缸和脚板驱动活塞之间气动力的作用下,脚板驱动活塞伸长,推动脚板机构的下支架转动,使脚板翻转,进一步增大接触面积,有效地防止机器人脚部沉陷,提高了机器人于软土环境中的行走能力。
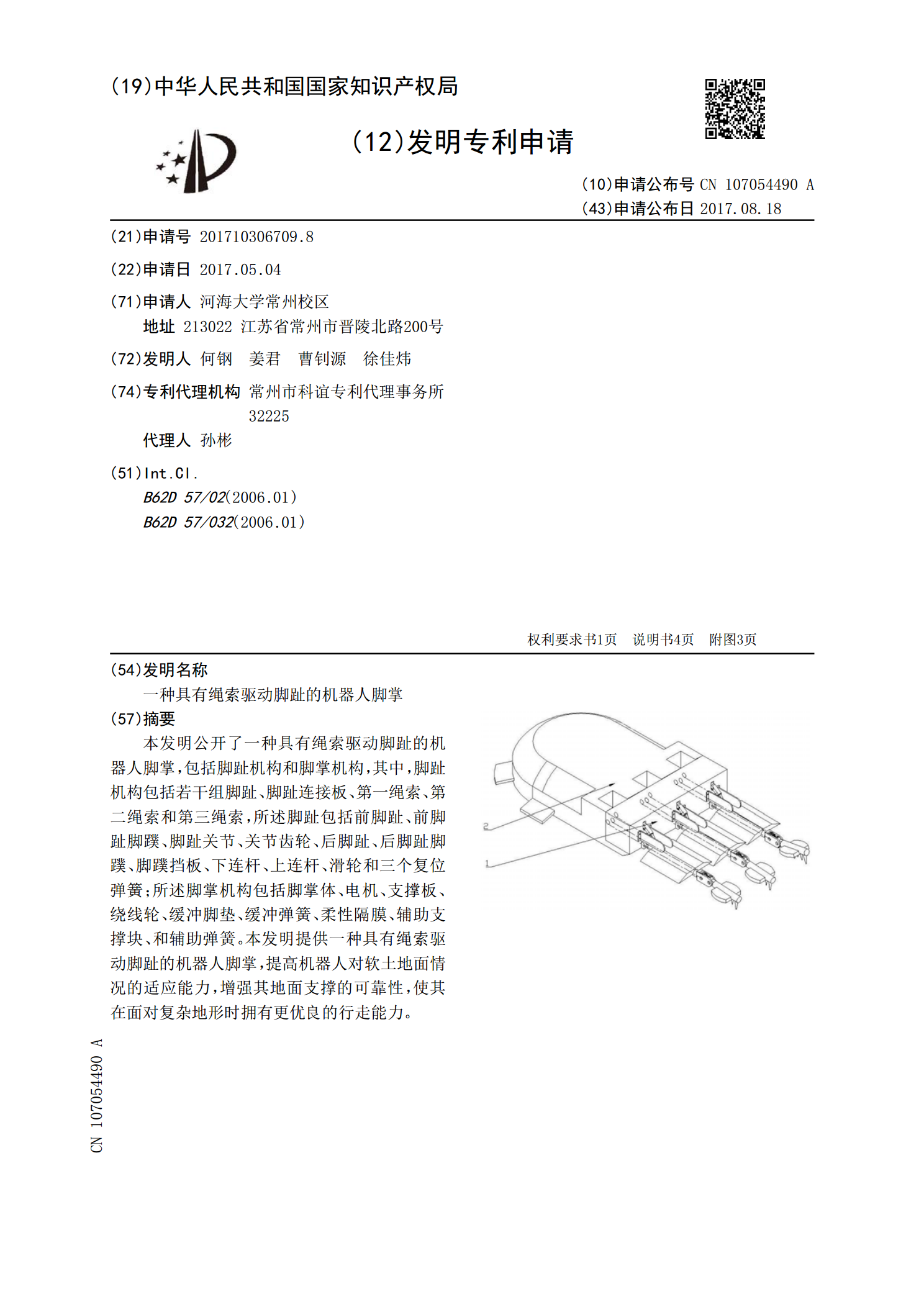
一种具有绳索驱动脚趾的机器人脚掌.pdf
本发明公开了一种具有绳索驱动脚趾的机器人脚掌,包括脚趾机构和脚掌机构,其中,脚趾机构包括若干组脚趾、脚趾连接板、第一绳索、第二绳索和第三绳索,所述脚趾包括前脚趾、前脚趾脚蹼、脚趾关节、关节齿轮、后脚趾、后脚趾脚蹼、脚蹼挡板、下连杆、上连杆、滑轮和三个复位弹簧;所述脚掌机构包括脚掌体、电机、支撑板、绕线轮、缓冲脚垫、缓冲弹簧、柔性隔膜、辅助支撑块、和辅助弹簧。本发明提供一种具有绳索驱动脚趾的机器人脚掌,提高机器人对软土地面情况的适应能力,增强其地面支撑的可靠性,使其在面对复杂地形时拥有更优良的行走能力。
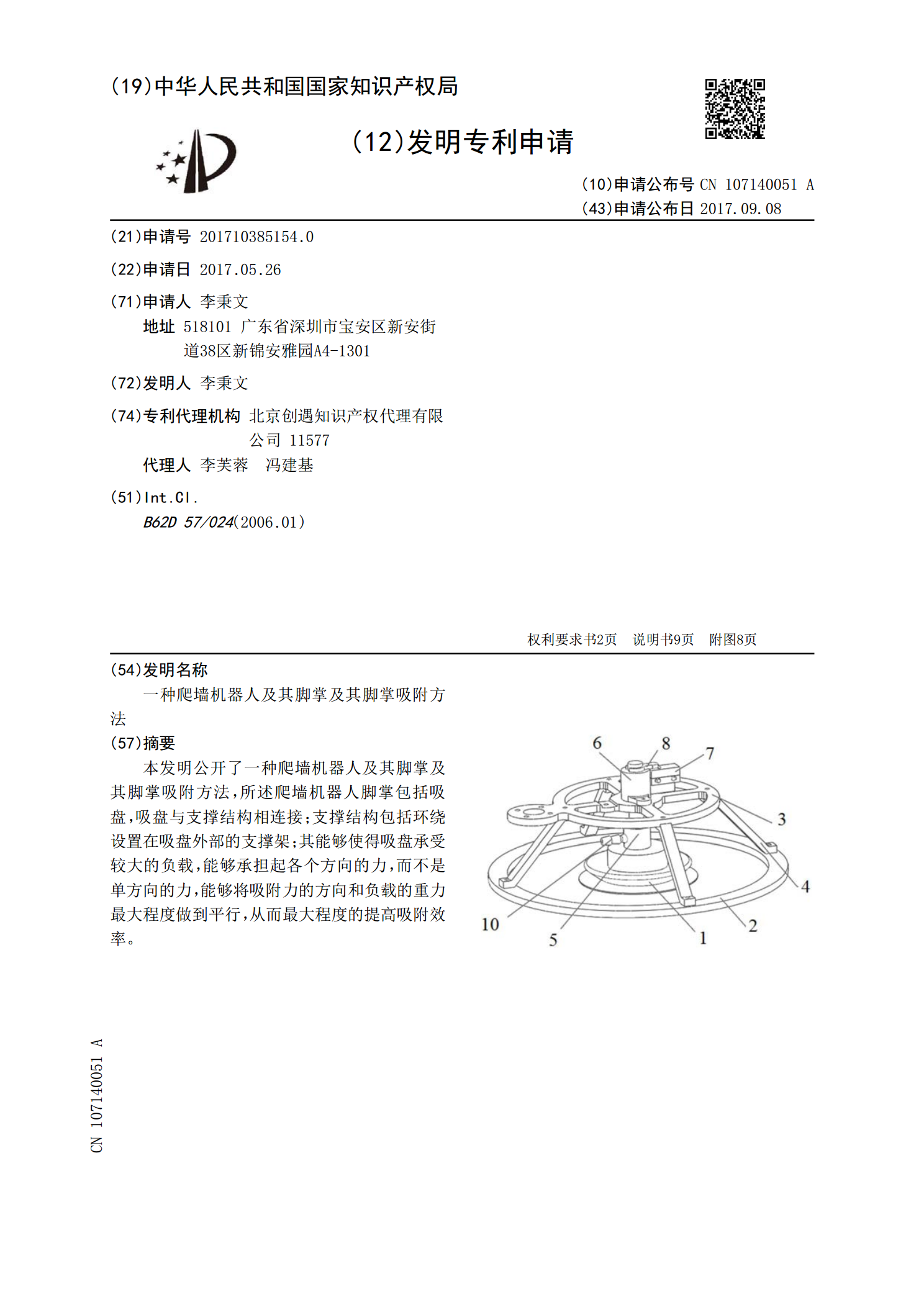
一种爬墙机器人及其脚掌及其脚掌吸附方法.pdf
本发明公开了一种爬墙机器人及其脚掌及其脚掌吸附方法,所述爬墙机器人脚掌包括吸盘,吸盘与支撑结构相连接;支撑结构包括环绕设置在吸盘外部的支撑架;其能够使得吸盘承受较大的负载,能够承担起各个方向的力,而不是单方向的力,能够将吸附力的方向和负载的重力最大程度做到平行,从而最大程度的提高吸附效率。