
一种脚蹼可伸缩的机器人脚掌结构.pdf

St****12

1/9
2/9
3/9

4/9
5/9
6/9

7/9

8/9
9/9
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料
一种脚蹼可伸缩的机器人脚掌结构.pdf
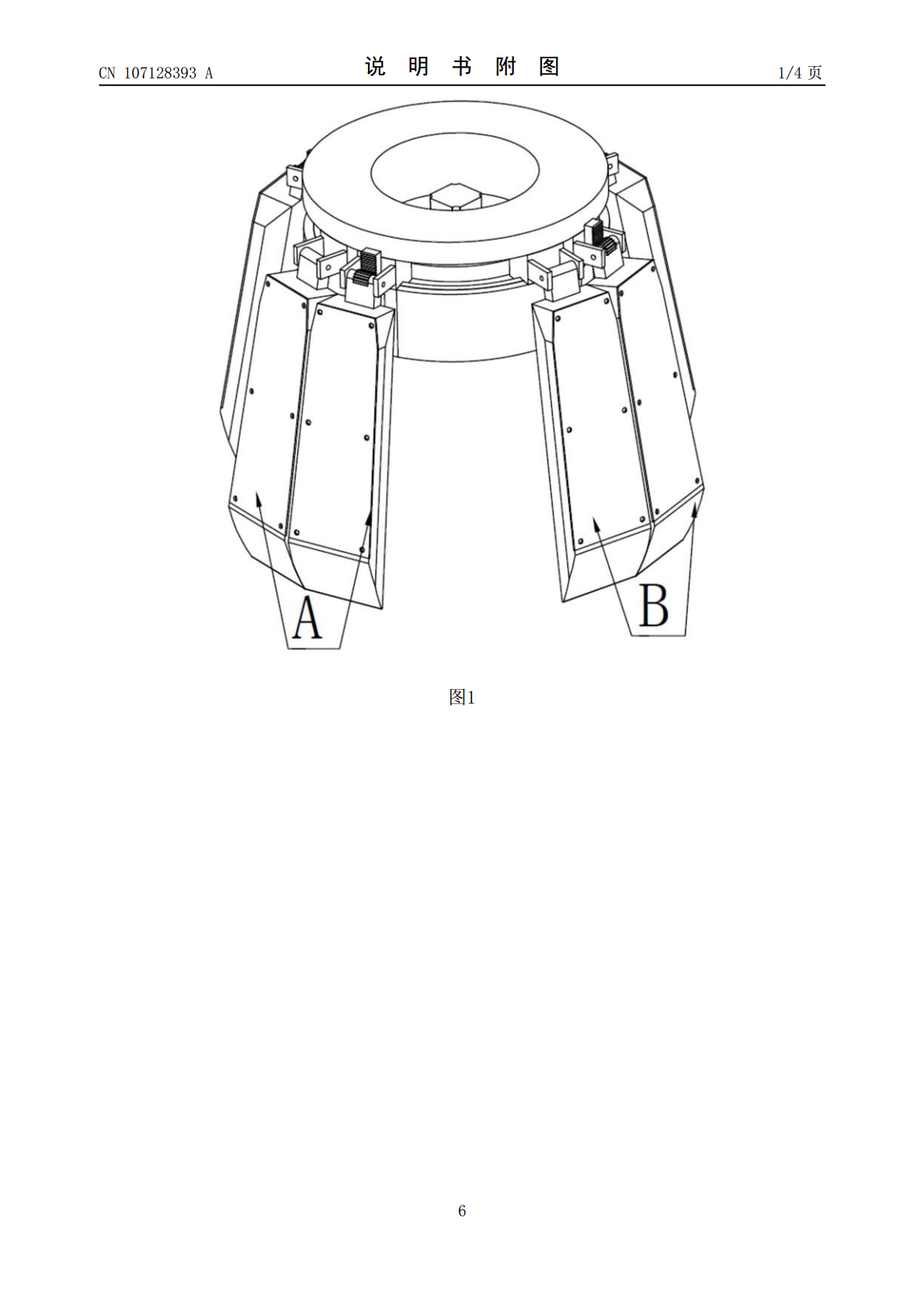
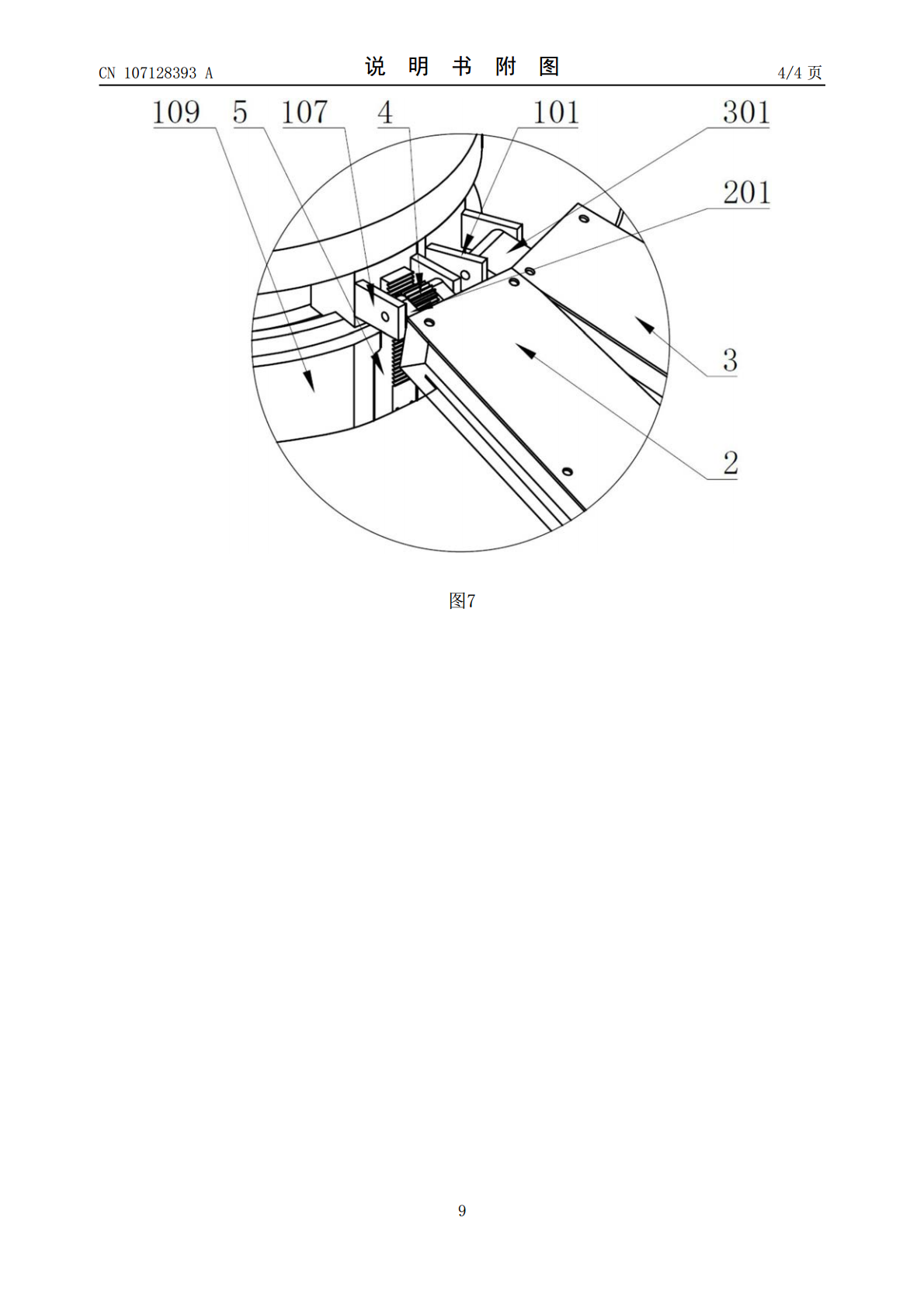
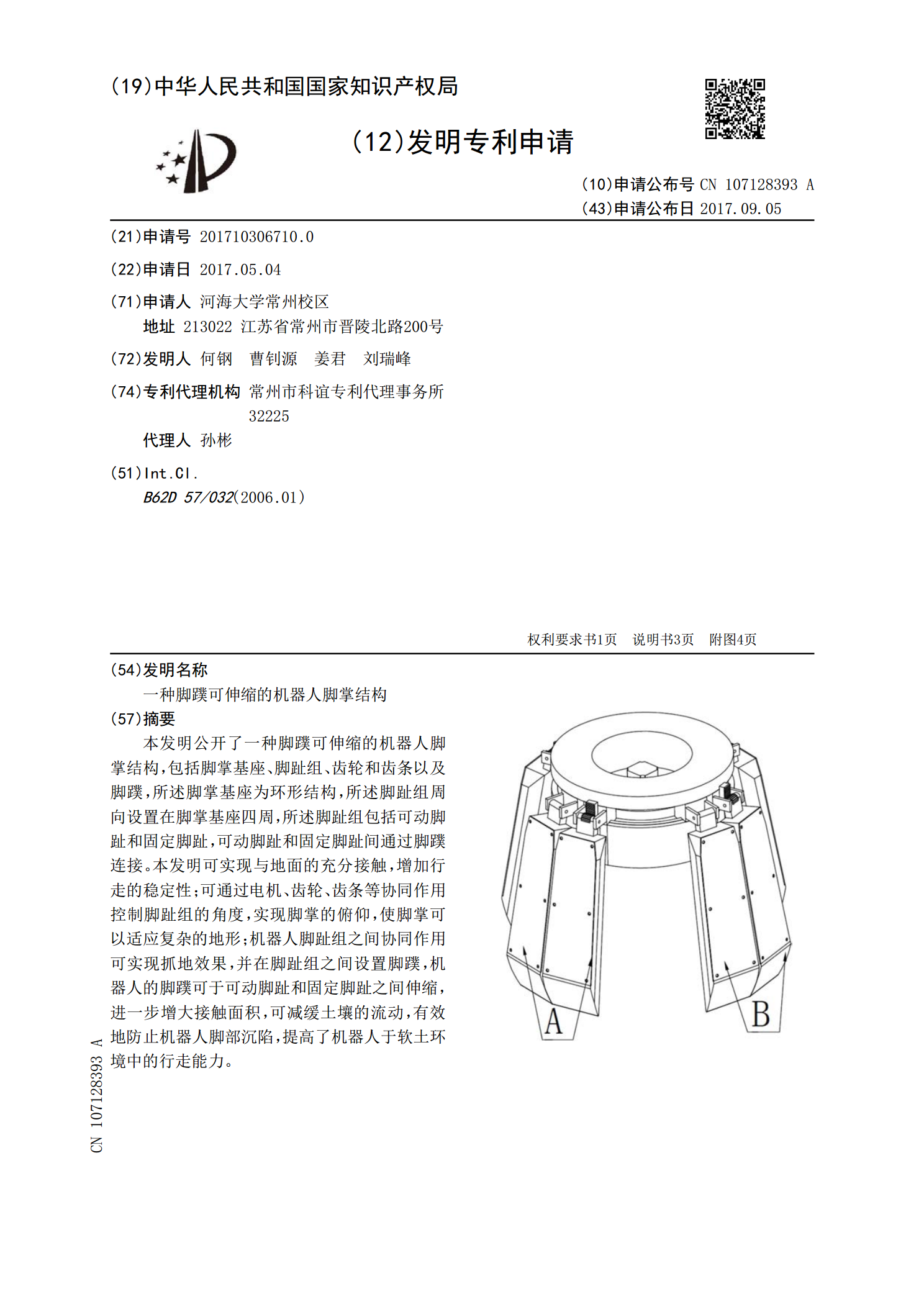
本发明公开了一种脚蹼可伸缩的机器人脚掌结构,包括脚掌基座、脚趾组、齿轮和齿条以及脚蹼,所述脚掌基座为环形结构,所述脚趾组周向设置在脚掌基座四周,所述脚趾组包括可动脚趾和固定脚趾,可动脚趾和固定脚趾间通过脚蹼连接。本发明可实现与地面的充分接触,增加行走的稳定性;可通过电机、齿轮、齿条等协同作用控制脚趾组的角度,实现脚掌的俯仰,使脚掌可以适应复杂的地形;机器人脚趾组之间协同作用可实现抓地效果,并在脚趾组之间设置脚蹼,机器人的脚蹼可于可动脚趾和固定脚趾之间伸缩,进一步增大接触面积,可减缓土壤的流动,有效地防止机
一种具有可卷绕脚蹼的机器人脚掌.pdf
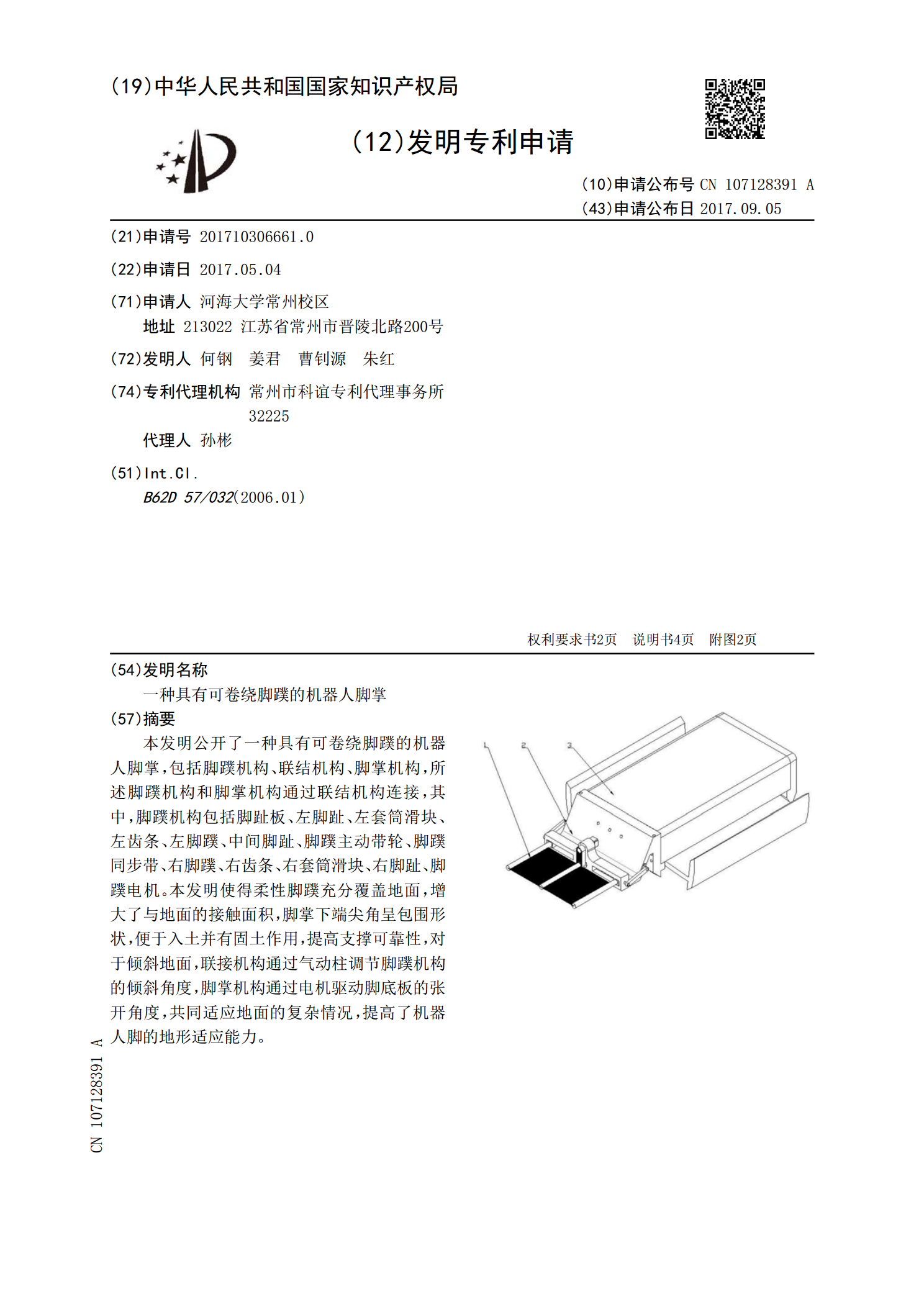
本发明公开了一种具有可卷绕脚蹼的机器人脚掌,包括脚蹼机构、联结机构、脚掌机构,所述脚蹼机构和脚掌机构通过联结机构连接,其中,脚蹼机构包括脚趾板、左脚趾、左套筒滑块、左齿条、左脚蹼、中间脚趾、脚蹼主动带轮、脚蹼同步带、右脚蹼、右齿条、右套筒滑块、右脚趾、脚蹼电机。本发明使得柔性脚蹼充分覆盖地面,增大了与地面的接触面积,脚掌下端尖角呈包围形状,便于入土并有固土作用,提高支撑可靠性,对于倾斜地面,联接机构通过气动柱调节脚蹼机构的倾斜角度,脚掌机构通过电机驱动脚底板的张开角度,共同适应地面的复杂情况,提高了机器人

一种可伸缩的机器人手臂.pdf
本发明公开了一种可伸缩的机器人手臂,包括前臂与后臂,后臂后端固定设置,后臂前端两侧分别设置有支架,支架包括上支架与下支架,上支架与下支架相对应的一侧设有齿条,下支架与上支架相对应的一侧设有滑槽,滑槽中空设置;还包括电机、控制器,电机与控制器电性连接;前臂后端的底部设有转轴,转轴穿过前臂后端,转轴的其中一端通过联轴器与电机的输出端连接,转轴的另一端通过轴承设置在滑槽上,电机输出端与联轴器之间设有齿轮,齿轮与齿条相啮合且齿轮设置在其中一侧滑槽的中空位置处,电机与轴承的底部设有与滑槽相配合的滑块。本发明能现机器
一种具有可折叠脚趾的机器人脚掌结构.pdf
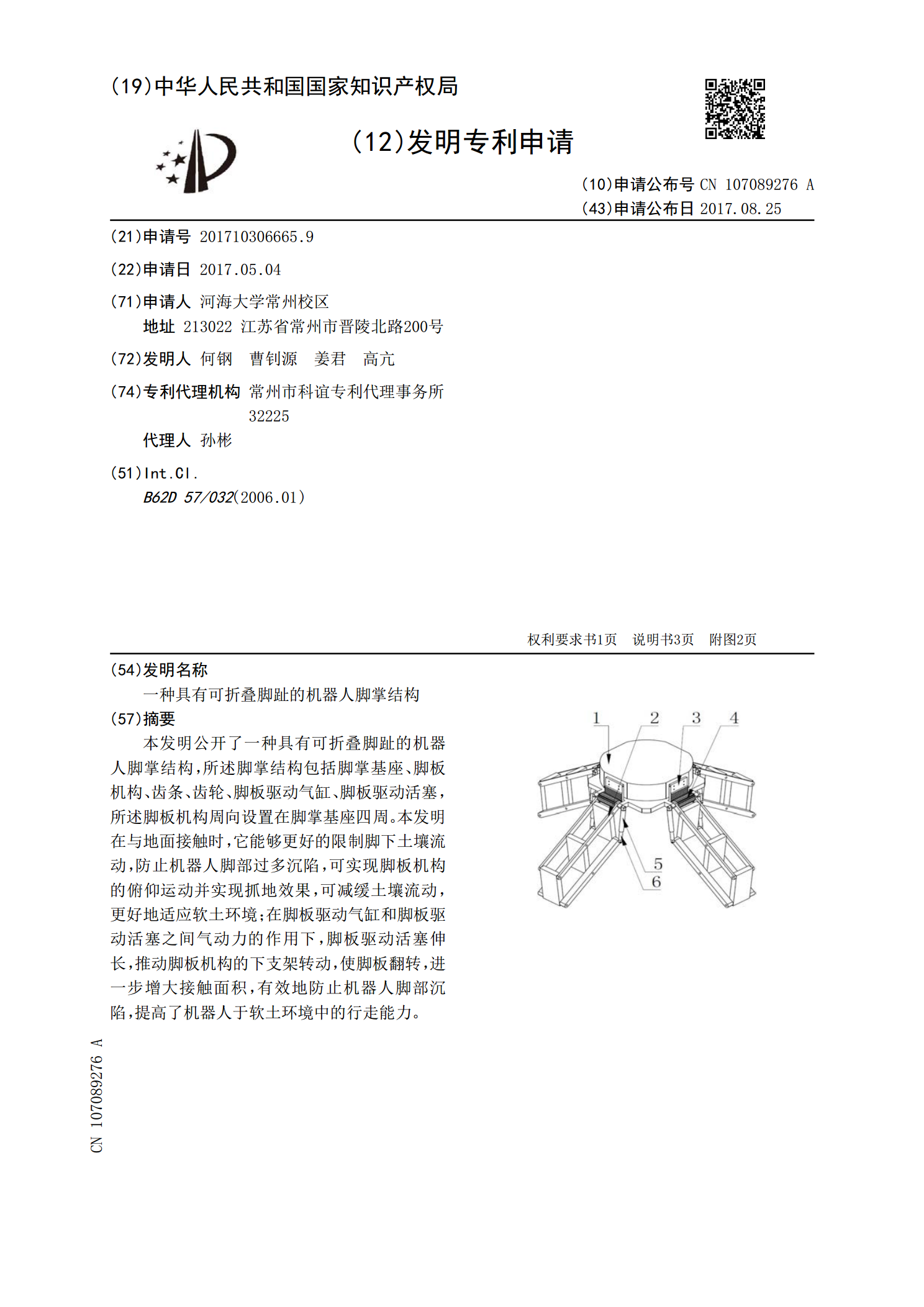
本发明公开了一种具有可折叠脚趾的机器人脚掌结构,所述脚掌结构包括脚掌基座、脚板机构、齿条、齿轮、脚板驱动气缸、脚板驱动活塞,所述脚板机构周向设置在脚掌基座四周。本发明在与地面接触时,它能够更好的限制脚下土壤流动,防止机器人脚部过多沉陷,可实现脚板机构的俯仰运动并实现抓地效果,可减缓土壤流动,更好地适应软土环境;在脚板驱动气缸和脚板驱动活塞之间气动力的作用下,脚板驱动活塞伸长,推动脚板机构的下支架转动,使脚板翻转,进一步增大接触面积,有效地防止机器人脚部沉陷,提高了机器人于软土环境中的行走能力。
一种可伸缩的建筑钢结构.pdf
(19)中华人民共和国国家知识产权局(12)发明专利说明书(10)申请公布号CN102561511A(43)申请公布日2012.07.11(21)申请号CN201110321809.0(22)申请日2012.03.02(71)申请人江苏科技大学地址212003江苏省镇江市梦溪路2号(72)发明人唐柏鉴裴波(74)专利代理机构南京经纬专利商标代理有限公司代理人楼高潮(51)Int.CIE04B1/343权利要求说明书说明书幅图(54)发明名称一种可伸缩的建筑钢结构(57)摘要本发明公开了一种可伸缩的建筑钢结