
用于下肢康复机器人的基于绳驱动的内足机构.pdf

Th****84

1/10
2/10
3/10

4/10

5/10
6/10
7/10
8/10

9/10
10/10
亲,该文档总共17页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
用于下肢康复机器人的基于绳驱动的内足机构.pdf
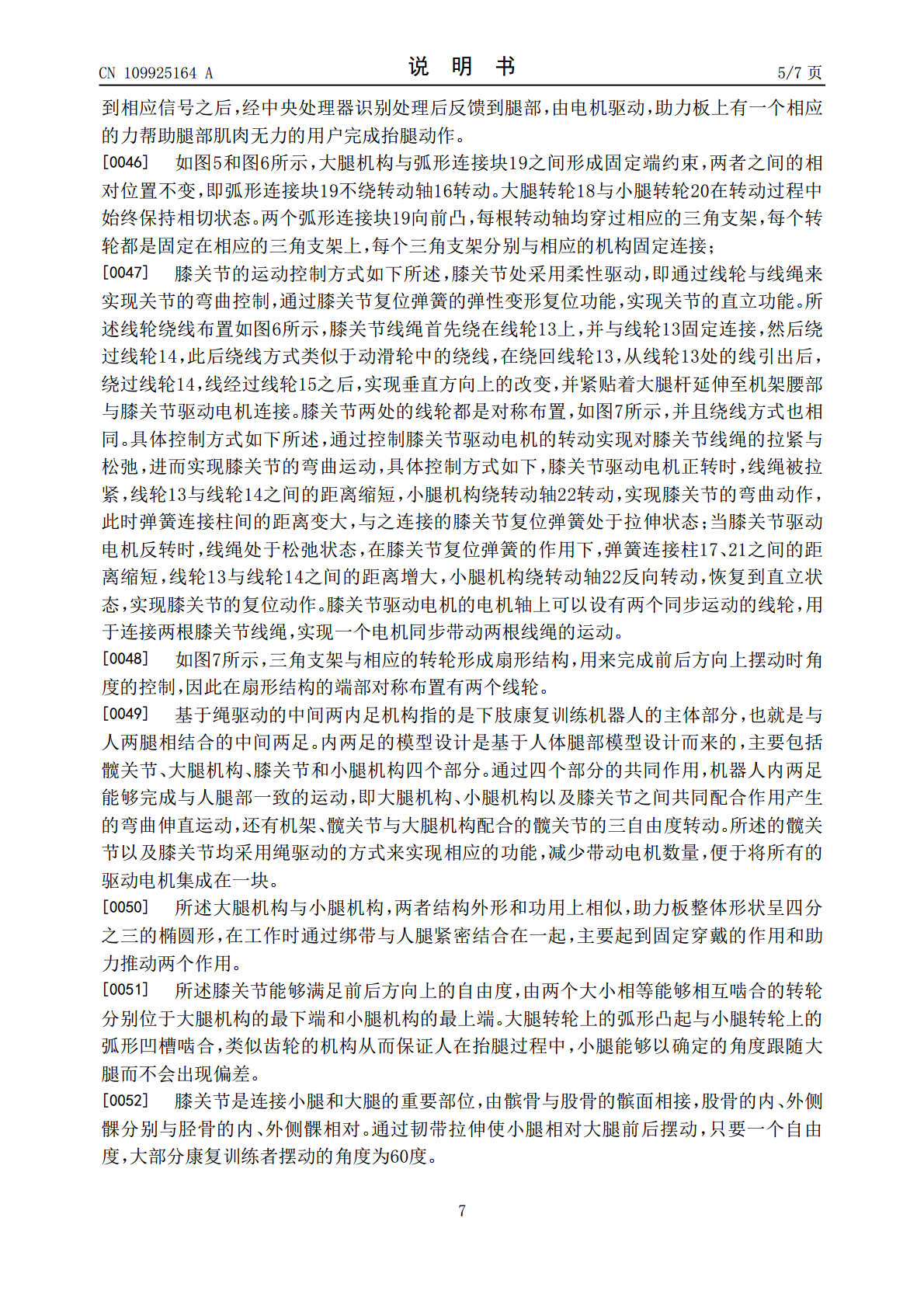
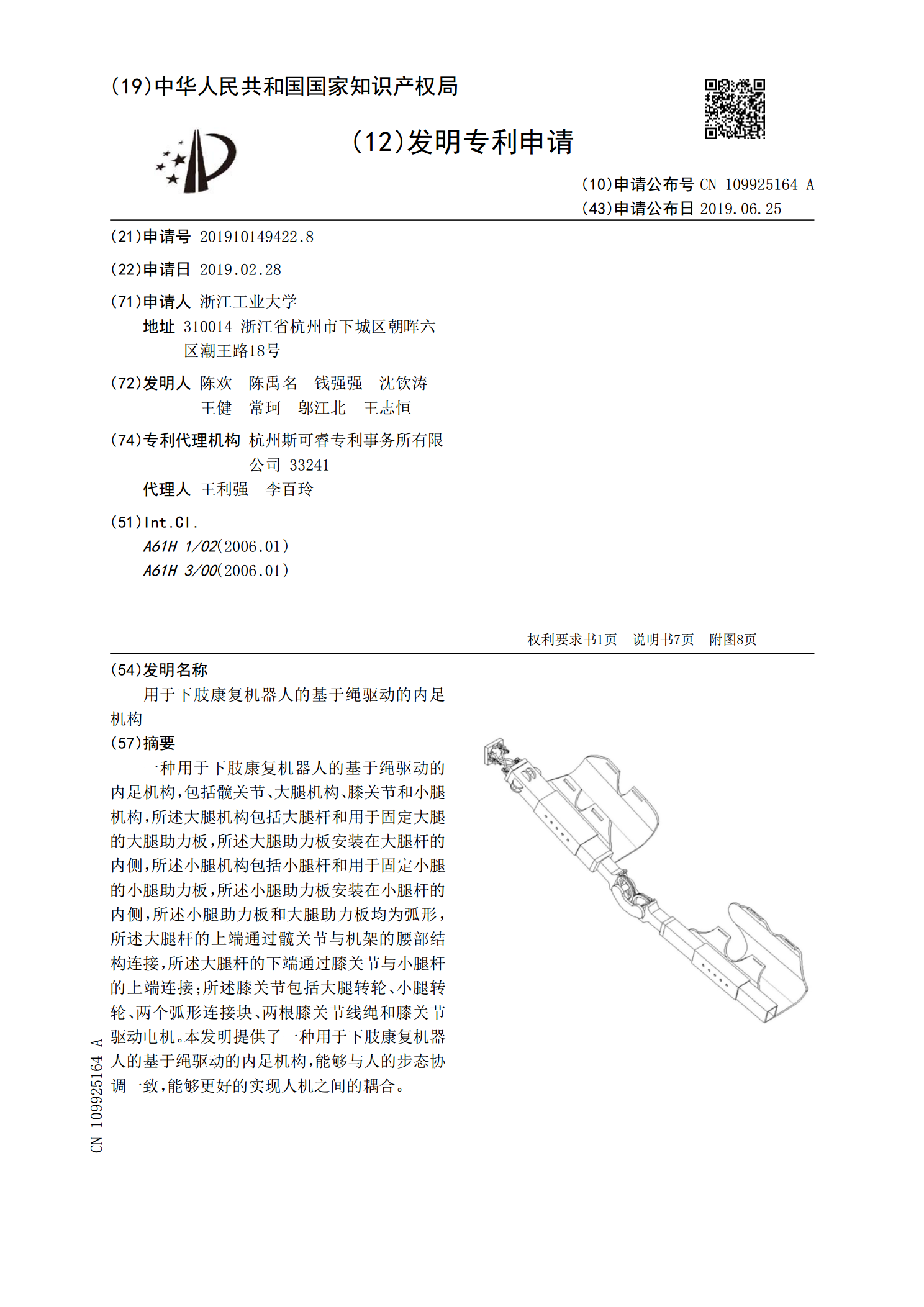
一种用于下肢康复机器人的基于绳驱动的内足机构,包括髋关节、大腿机构、膝关节和小腿机构,所述大腿机构包括大腿杆和用于固定大腿的大腿助力板,所述大腿助力板安装在大腿杆的内侧,所述小腿机构包括小腿杆和用于固定小腿的小腿助力板,所述小腿助力板安装在小腿杆的内侧,所述小腿助力板和大腿助力板均为弧形,所述大腿杆的上端通过髋关节与机架的腰部结构连接,所述大腿杆的下端通过膝关节与小腿杆的上端连接;所述膝关节包括大腿转轮、小腿转轮、两个弧形连接块、两根膝关节线绳和膝关节驱动电机。本发明提供了一种用于下肢康复机器人的基于绳驱
基于绳‑滑轮机构的欠驱动下肢助力外骨骼机器人.pdf
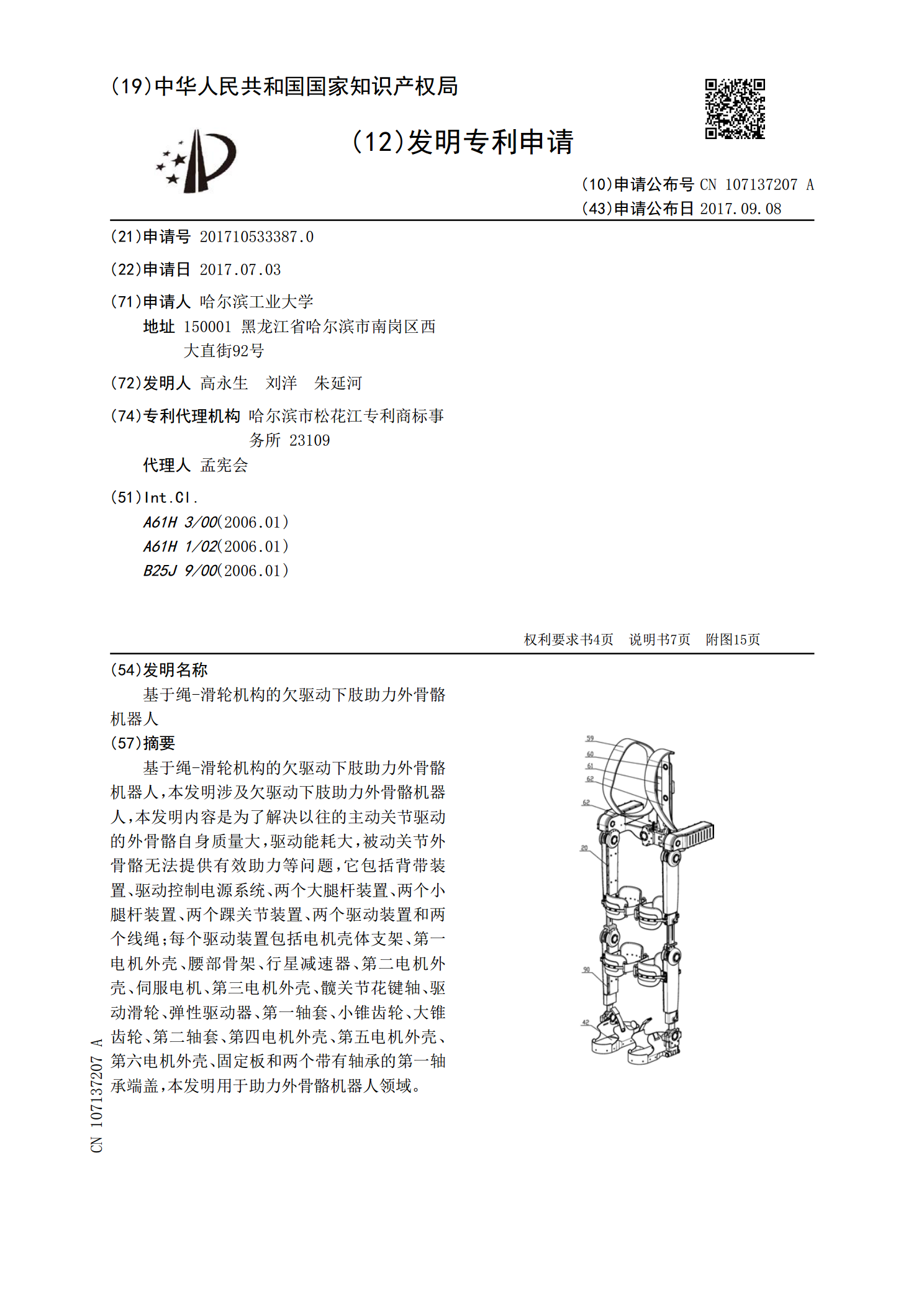
基于绳‑滑轮机构的欠驱动下肢助力外骨骼机器人,本发明涉及欠驱动下肢助力外骨骼机器人,本发明内容是为了解决以往的主动关节驱动的外骨骼自身质量大,驱动能耗大,被动关节外骨骼无法提供有效助力等问题,它包括背带装置、驱动控制电源系统、两个大腿杆装置、两个小腿杆装置、两个踝关节装置、两个驱动装置和两个线绳;每个驱动装置包括电机壳体支架、第一电机外壳、腰部骨架、行星减速器、第二电机外壳、伺服电机、第三电机外壳、髋关节花键轴、驱动滑轮、弹性驱动器、第一轴套、小锥齿轮、大锥齿轮、第二轴套、第四电机外壳、第五电机外壳、第六

一种安装于轮椅座椅的绳驱动下肢关节康复机构.pdf
本发明为一种安装于轮椅座椅的绳驱动下肢关节康复机构,包括主体部分、脚踏板机构、绳驱动装置和座椅框架,所述主体部分上端由两个关节底座连接固定于座椅框架上,下端与脚踏板机构相连;主体部分包括关节底座、三个变刚度结构、第一关节、导向杆、直线推杆、第二关节、第三关节、支撑架、直线推杆底座,直线推杆沿竖直方向固定在直线推杆底座上,导向杆与脚踏板机构相连。该机构利用绳驱动,拉动旋转关节绕轴心旋转,实现对其运动轨迹的控制,通过三个变刚度结构,改变关节刚度,实现运动的解耦,由于绳驱动的轻量化,该机构安装于轮椅座椅上时,可

绳驱动腰部康复机器人.pdf
本发明公开一种绳驱动腰部康复机器人,包括机架、重力平衡单元、绳索绕放单元、绳索驱动康复运动单元以及控制单元,绳索驱动康复运动单元包括康复腰带、牵引绳以及引导滑轮,康复腰带至少连接有六条牵引绳,每一条牵引绳对应配置一个绳索绕放单元;控制单元通过控制各绳索绕放单元来控制相应牵引绳绳长变化,带动康复患者腰部依正常人步行时的骨盆运动轨迹运动。因此,本发明针对康复训练中如何协调控制康复病人的骨盆运动轨迹问题,通过一套重力平衡单元和多根牵引绳协调动作,再现康复病人在站立步行情况下的正常人骨盆运动轨迹,达到腰部的有效康

绳驱动仿人机器人下肢设计与仿真分析.docx
绳驱动仿人机器人下肢设计与仿真分析绳驱动仿人机器人下肢设计与仿真分析摘要:随着机器人技术的发展,仿人机器人在人类生活中的应用越来越广泛。绳驱动机器人作为一种新型驱动方式,具有结构简单、重量轻、功率密度高等优点,越来越受到研究人员的关注。本文以绳驱动仿人机器人为研究对象,重点探讨了其下肢设计与仿真分析。1.引言随着机器人技术的突飞猛进,仿人机器人在人类生活中起到了越来越重要的作用。然而,传统的机器人驱动方式如电机驱动存在着功率密度低、结构复杂、重量大等问题。绳驱动作为一种新型驱动方式,具有结构简单、重量轻、