
搬运机器车.pdf

斌斌****公主

1/6
2/6

3/6

4/6

5/6

6/6
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料
搬运机器车.pdf
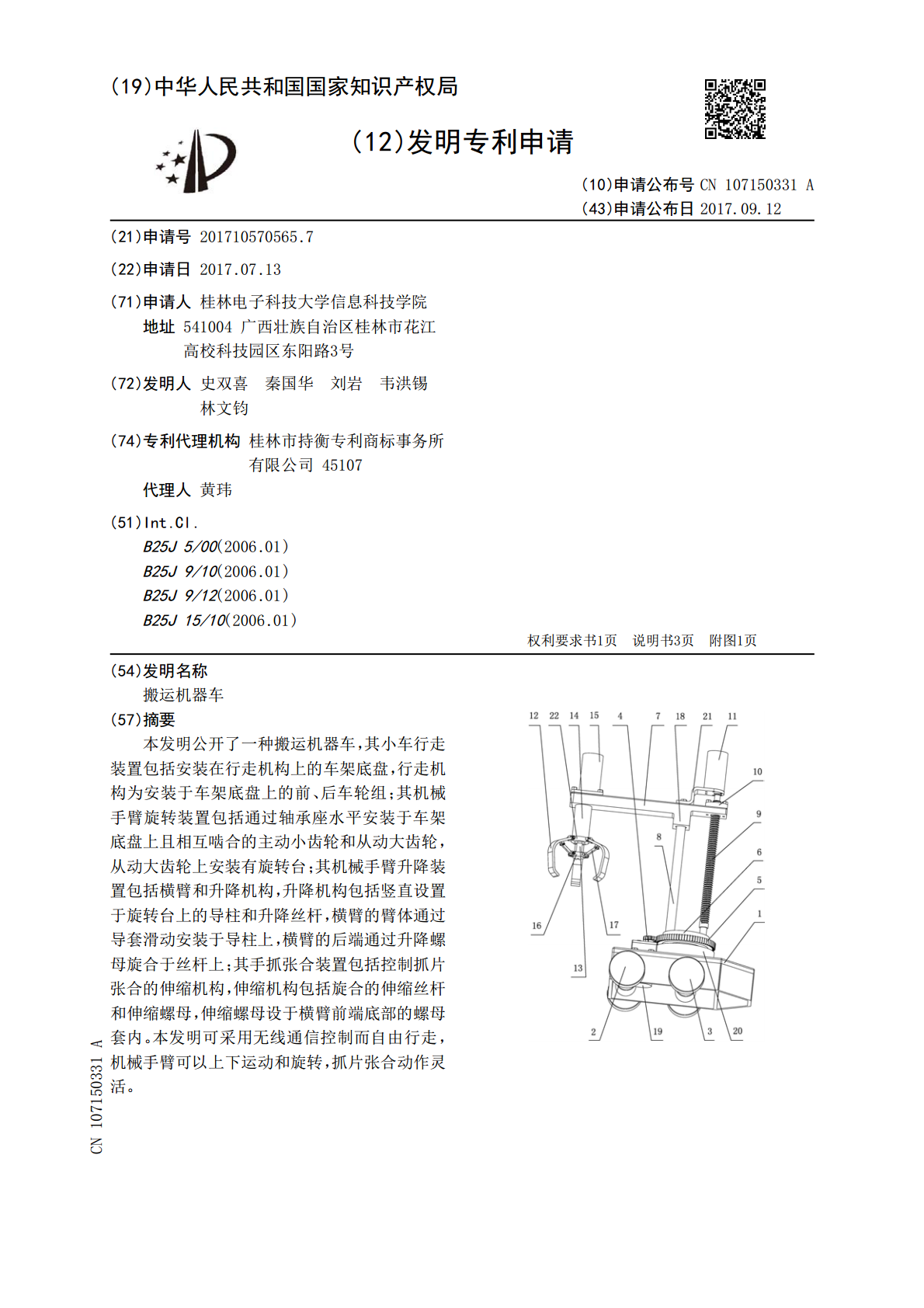
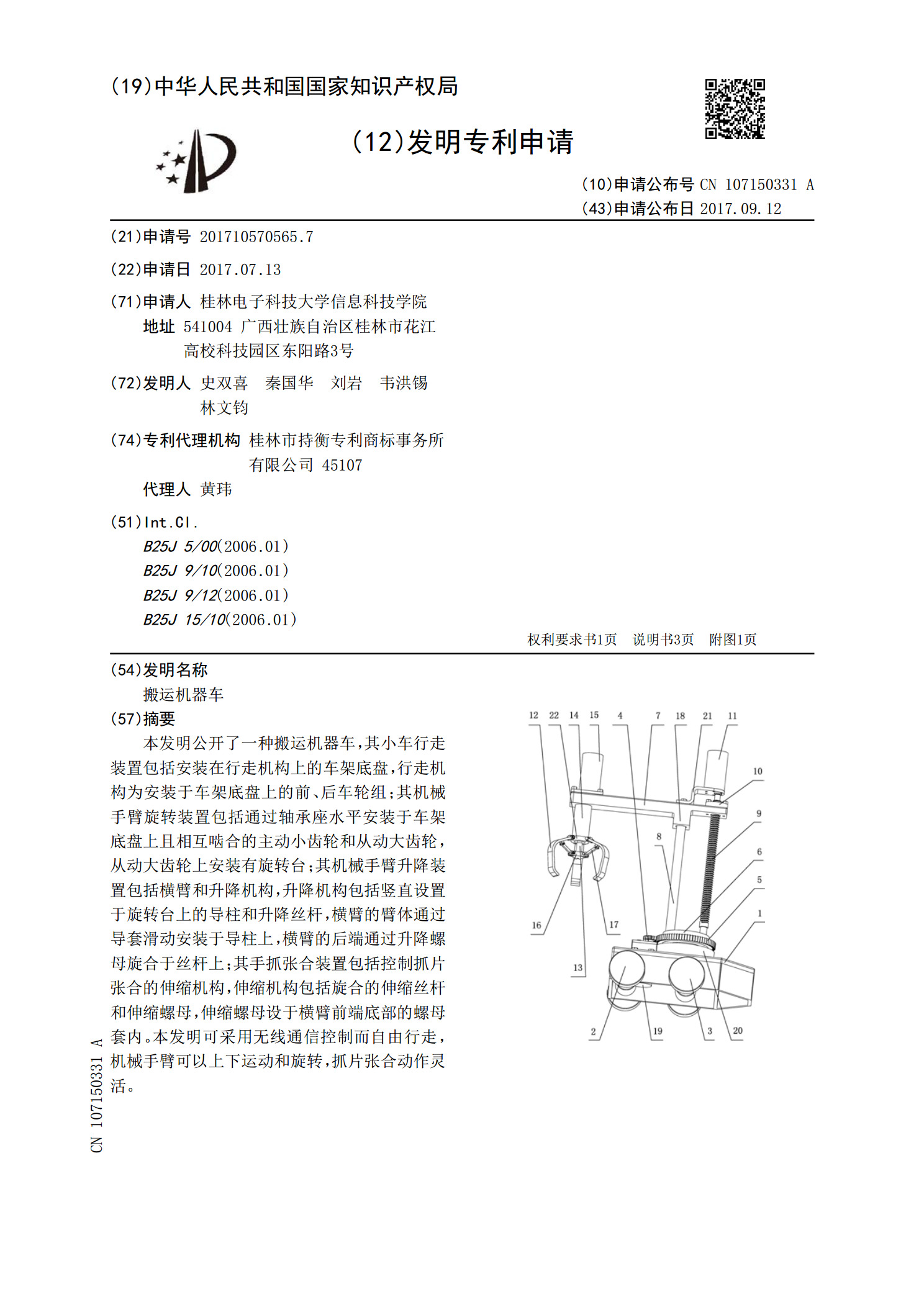
本发明公开了一种搬运机器车,其小车行走装置包括安装在行走机构上的车架底盘,行走机构为安装于车架底盘上的前、后车轮组;其机械手臂旋转装置包括通过轴承座水平安装于车架底盘上且相互啮合的主动小齿轮和从动大齿轮,从动大齿轮上安装有旋转台;其机械手臂升降装置包括横臂和升降机构,升降机构包括竖直设置于旋转台上的导柱和升降丝杆,横臂的臂体通过导套滑动安装于导柱上,横臂的后端通过升降螺母旋合于丝杆上;其手抓张合装置包括控制抓片张合的伸缩机构,伸缩机构包括旋合的伸缩丝杆和伸缩螺母,伸缩螺母设于横臂前端底部的螺母套内。本发明

轨道式智能搬运机器车.pdf
本发明公开了一种轨道式智能搬运机器车,包括:车架,位于车架上的滚轮,位于车架顶部的储物箱,所述储物箱内放置储物盒;支撑板,连接在支撑板与车架之间的升降机构;一级转动板,连接在一级转动板与支撑板之间的一级转动机构;一级平移板,连接在一级平移板与一级转动板之间的一级平移机构;二级转动板,连接在二级转动板与一级平移板之间的二级转动机构;二级平移板,连接在二级平移板与二级转动板之间的二级平移机构;连接在二级平移板上的执行机构。本发明是现有人工搬运货物的替代装置,减少了人的体力劳动,提高了生产效率;通过两级转动机构

随车式可爬车搬运机器人的前车装置.pdf
本发明涉及一种搬运机器人,具体的说是一种随车式可爬车搬运机器人的前车装置,属于搬运机器人技术领域。其包括前车主体、前车底盘、前车伸缩货叉和伸缩油缸,前车主体包括滑架和滑架立板,滑架前端连接滑架立板,滑架立板两侧设有滑架导轨,滑架立板两侧设有两个斜导轨,斜导轨位于滑架导轨下端。前车伸缩货叉通过货叉滑轮滑动连接在前车主体的滑架导轨上。前车底盘通过两侧的导向轴承滑动连接在前车主体的斜导轨上,前车底盘和前车伸缩货叉连接成一体。本发明结构简单、紧凑、合理,整体质量小,随车携带方便;前车机构能够调整整车重心,使得整个
底盘组件及其控制方法、搬运车、建筑机器人.pdf
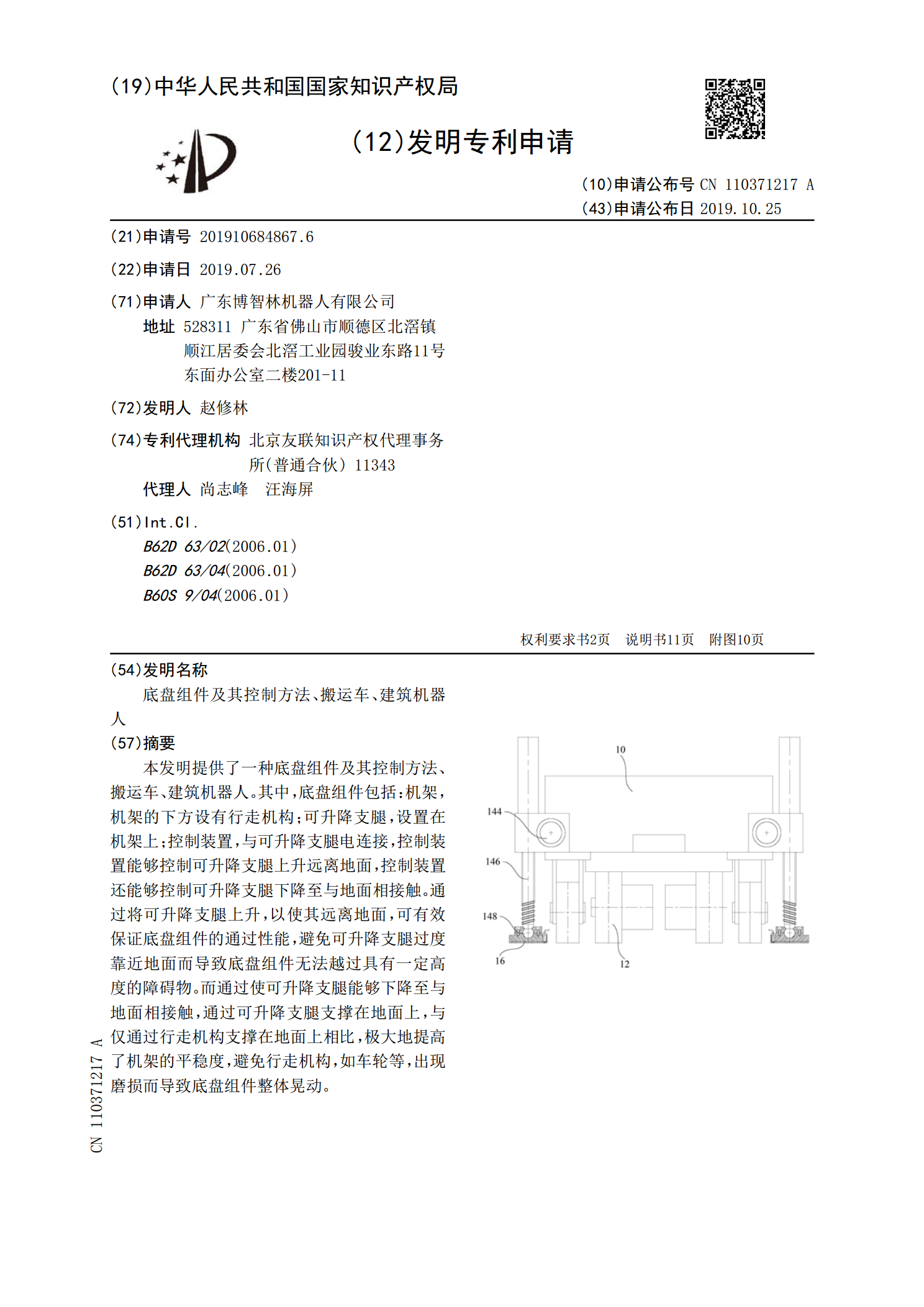
本发明提供了一种底盘组件及其控制方法、搬运车、建筑机器人。其中,底盘组件包括:机架,机架的下方设有行走机构;可升降支腿,设置在机架上;控制装置,与可升降支腿电连接,控制装置能够控制可升降支腿上升远离地面,控制装置还能够控制可升降支腿下降至与地面相接触。通过将可升降支腿上升,以使其远离地面,可有效保证底盘组件的通过性能,避免可升降支腿过度靠近地面而导致底盘组件无法越过具有一定高度的障碍物。而通过使可升降支腿能够下降至与地面相接触,通过可升降支腿支撑在地面上,与仅通过行走机构支撑在地面上相比,极大地提高了机架

汽车搬运机器.pdf
本发明实施例涉及汽车搬运设备技术领域,特别涉及一种汽车搬运机器,包括牵引部、中部支撑架和后部支撑架;牵引部设有牵引舵轮,牵引舵轮用于牵引汽车搬运机器进行转动和移动;中部支撑架的一端与牵引部活动连接,中部支撑架设有中部支撑轮组和转向驱动装置,转向驱动装置用于驱动中部支撑轮组配合牵引舵轮进行转向;后部支撑架设有后部支撑轮组,后部支撑架与中部支撑架之间设有第一伸缩机构,后部支撑架通过第一伸缩机构与中部支撑架的另一端连接,第一伸缩机构为交剪式伸缩机构,用于调整后部支撑架与中部支撑架之间的距离,通过上述方式,本发明