
一种基于轮廓梯度的目标跟踪方法.pdf

增梅****主啊

1/10
2/10

3/10

4/10

5/10
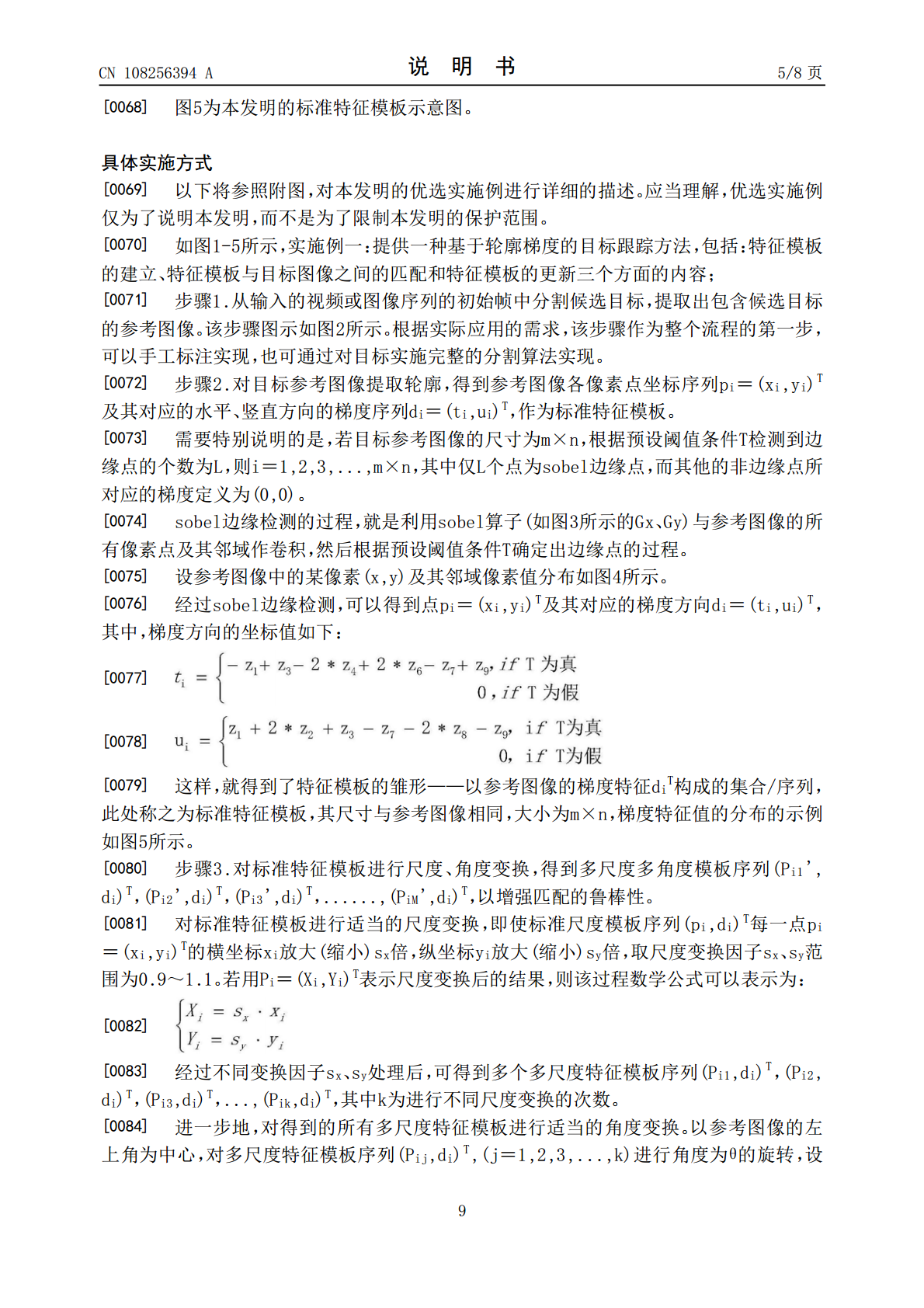
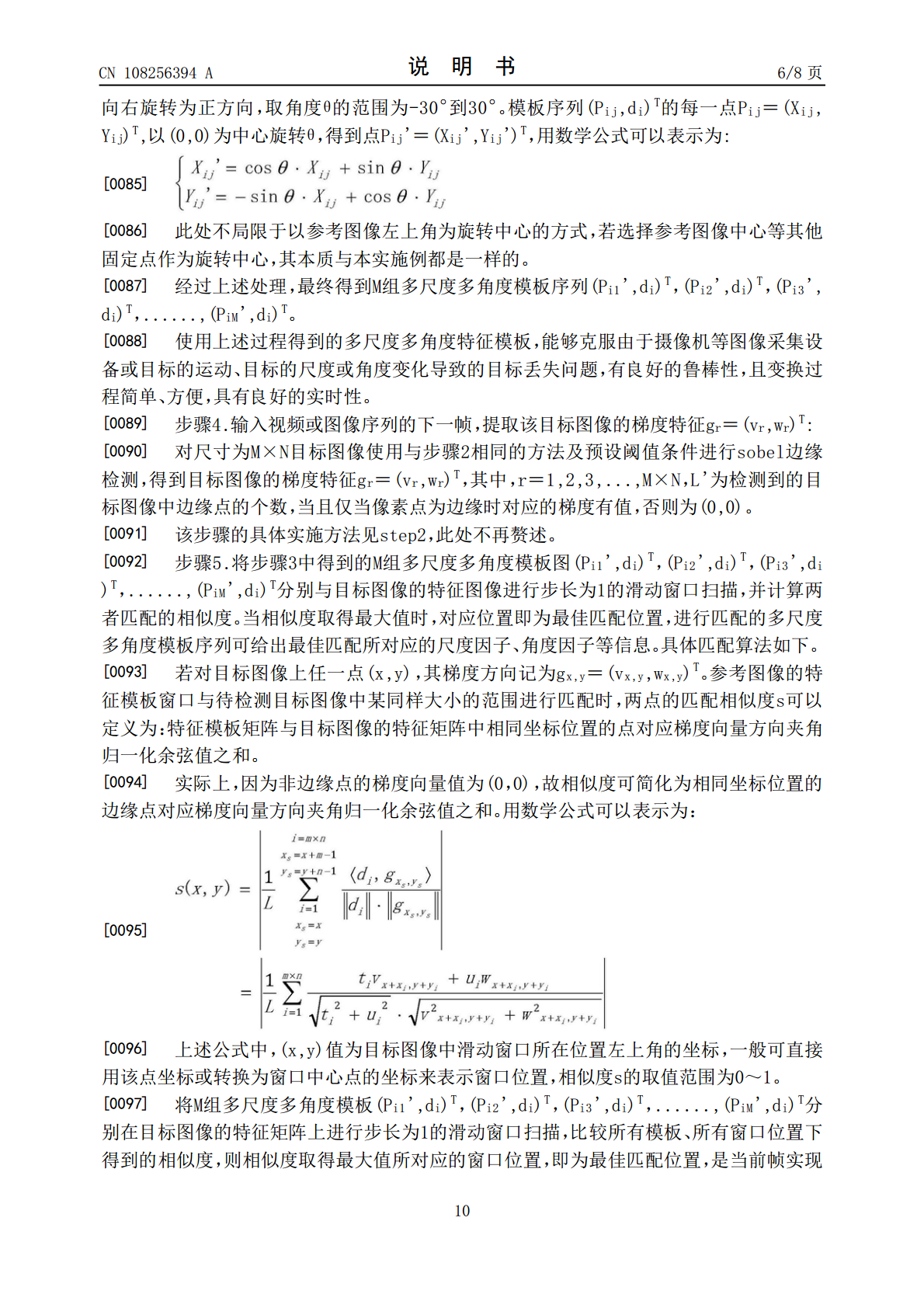
6/10
7/10

8/10
9/10
10/10
亲,该文档总共14页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
一种基于轮廓梯度的目标跟踪方法.pdf
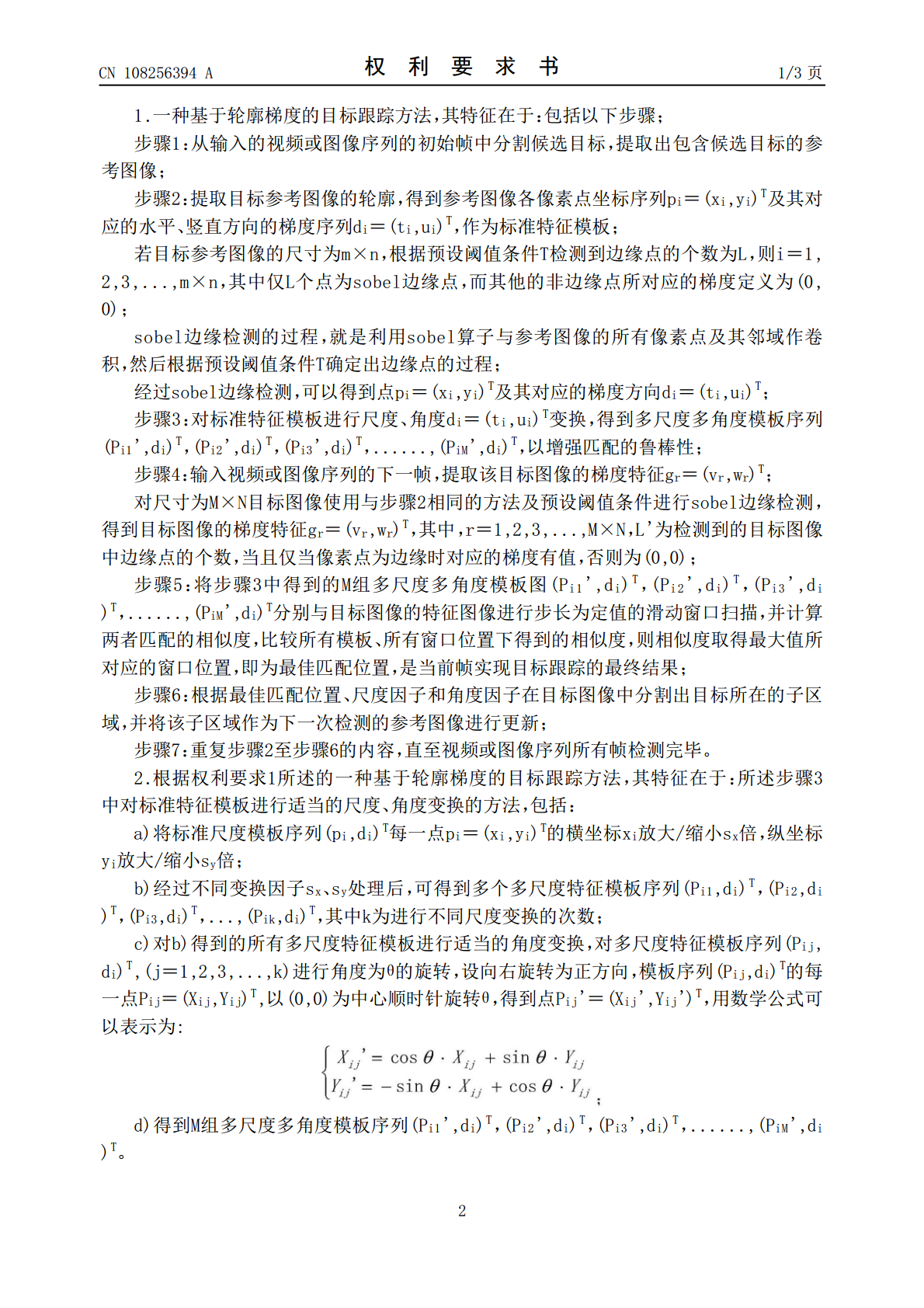
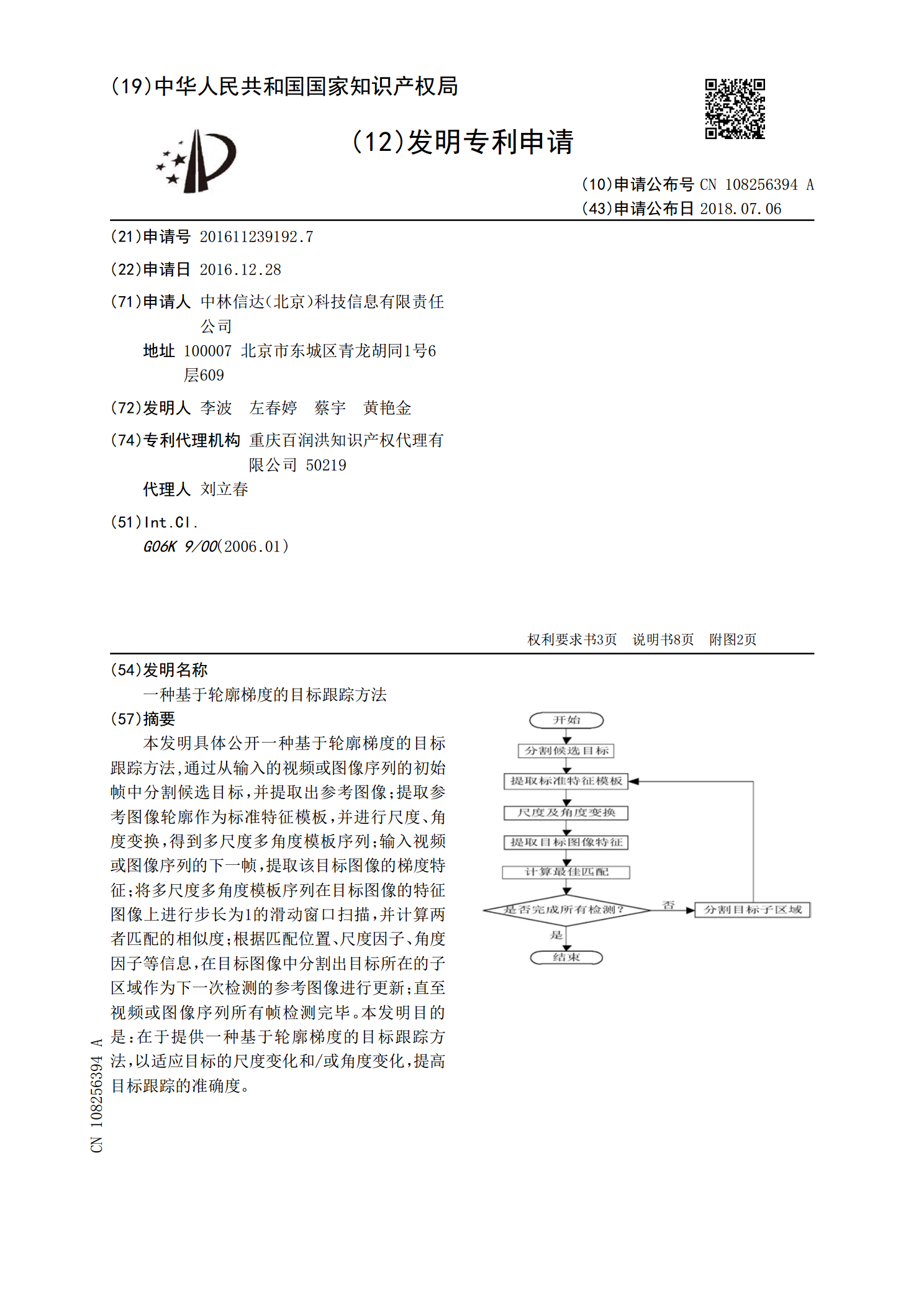
本发明具体公开一种基于轮廓梯度的目标跟踪方法,通过从输入的视频或图像序列的初始帧中分割候选目标,并提取出参考图像;提取参考图像轮廓作为标准特征模板,并进行尺度、角度变换,得到多尺度多角度模板序列;输入视频或图像序列的下一帧,提取该目标图像的梯度特征;将多尺度多角度模板序列在目标图像的特征图像上进行步长为1的滑动窗口扫描,并计算两者匹配的相似度;根据匹配位置、尺度因子、角度因子等信息,在目标图像中分割出目标所在的子区域作为下一次检测的参考图像进行更新;直至视频或图像序列所有帧检测完毕。本发明目的是:在于提供

基于策略梯度的目标跟踪方法.docx
基于策略梯度的目标跟踪方法基于策略梯度的目标跟踪方法摘要:目标跟踪是计算机视觉领域中的一项重要任务,具有广泛的应用。在目标跟踪中,策略梯度方法被广泛应用于强化学习任务中,取得了许多显著的成果。本论文将介绍基于策略梯度的目标跟踪方法的原理和技术,以及相关的研究进展和挑战。通过对比和分析不同方法的优缺点,可以为未来的研究和开发提供参考。1.引言目标跟踪是计算机视觉领域的重要研究方向,旨在通过对目标进行连续的检测和跟踪,实现对目标的准确定位或行为分析。目标跟踪在许多应用领域中具有广泛的应用,例如视频监控、自动驾
一种基于Online Boosting的目标精细轮廓跟踪方法.pdf
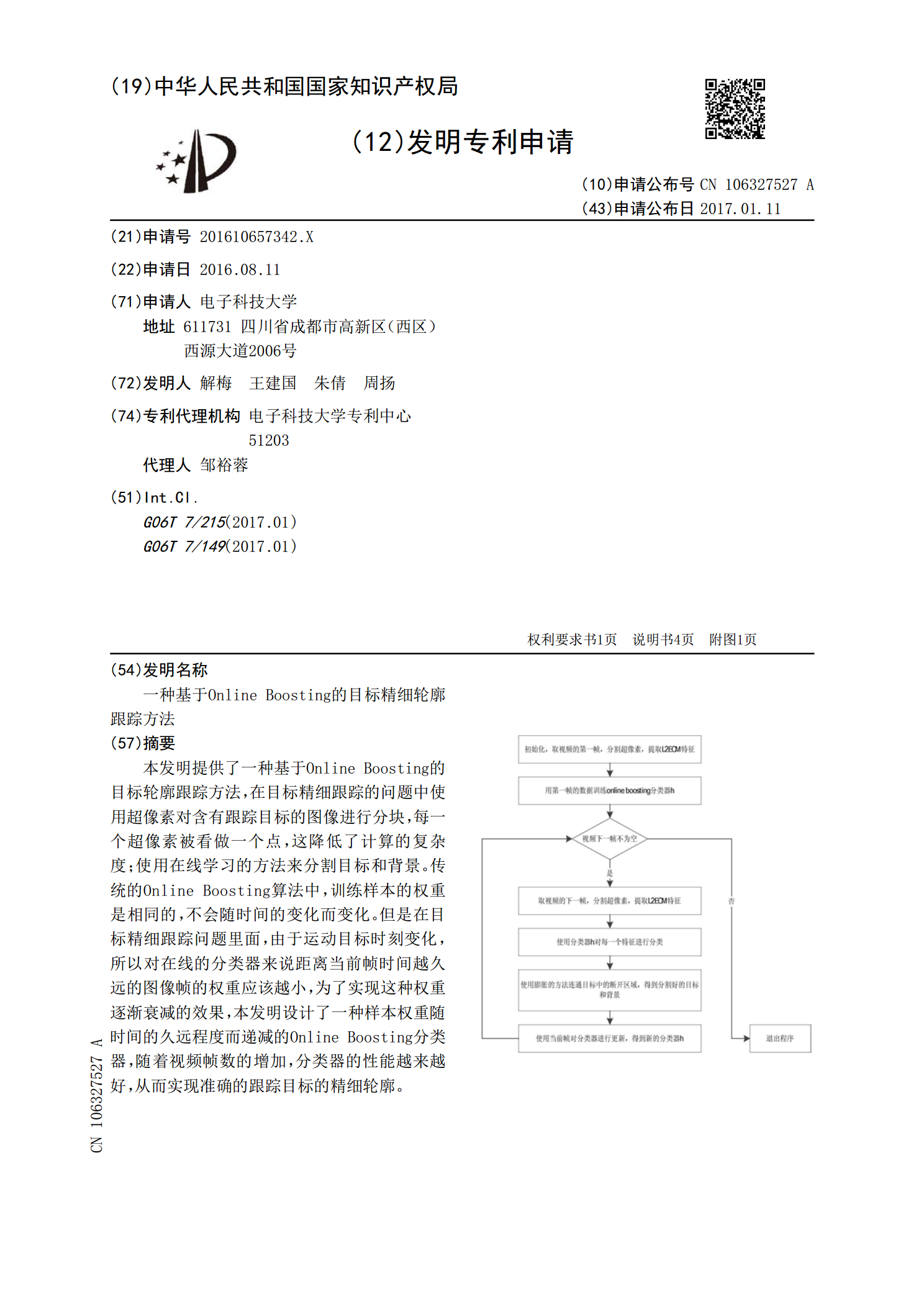
本发明提供了一种基于OnlineBoosting的目标轮廓跟踪方法,在目标精细跟踪的问题中使用超像素对含有跟踪目标的图像进行分块,每一个超像素被看做一个点,这降低了计算的复杂度;使用在线学习的方法来分割目标和背景。传统的OnlineBoosting算法中,训练样本的权重是相同的,不会随时间的变化而变化。但是在目标精细跟踪问题里面,由于运动目标时刻变化,所以对在线的分类器来说距离当前帧时间越久远的图像帧的权重应该越小,为了实现这种权重逐渐衰减的效果,本发明设计了一种样本权重随时间的久远程度而递减的Onl

基于水平集的在线目标轮廓跟踪方法.pdf
本发明公开了一种基于水平集的在线目标轮廓跟踪方法,先在第一帧目标图像中手动标定初始轮廓,设置水平集轮廓跟踪标志,根据初始目标轮廓来初始化判别式分类器、水平集函数和目标检测器;根据水平集轮廓跟踪标志是否有效来决定是否进行基于判别式表观模型的水平集轮廓跟踪;采用目标检测器进行目标检测;根据轮廓结果和目标结果判断得到目标轮廓跟踪结果,更新初始目标轮廓;然后根据目标轮廓跟踪结果对判别式分类器、水平集函数和目标检测器进行更新,再对下一帧图像进行目标轮廓跟踪。本发明采用基于判别式表观模型的水平集轮廓跟踪和目标检测联合
一种基于低秩稀疏表达的目标精细轮廓跟踪方法.pdf
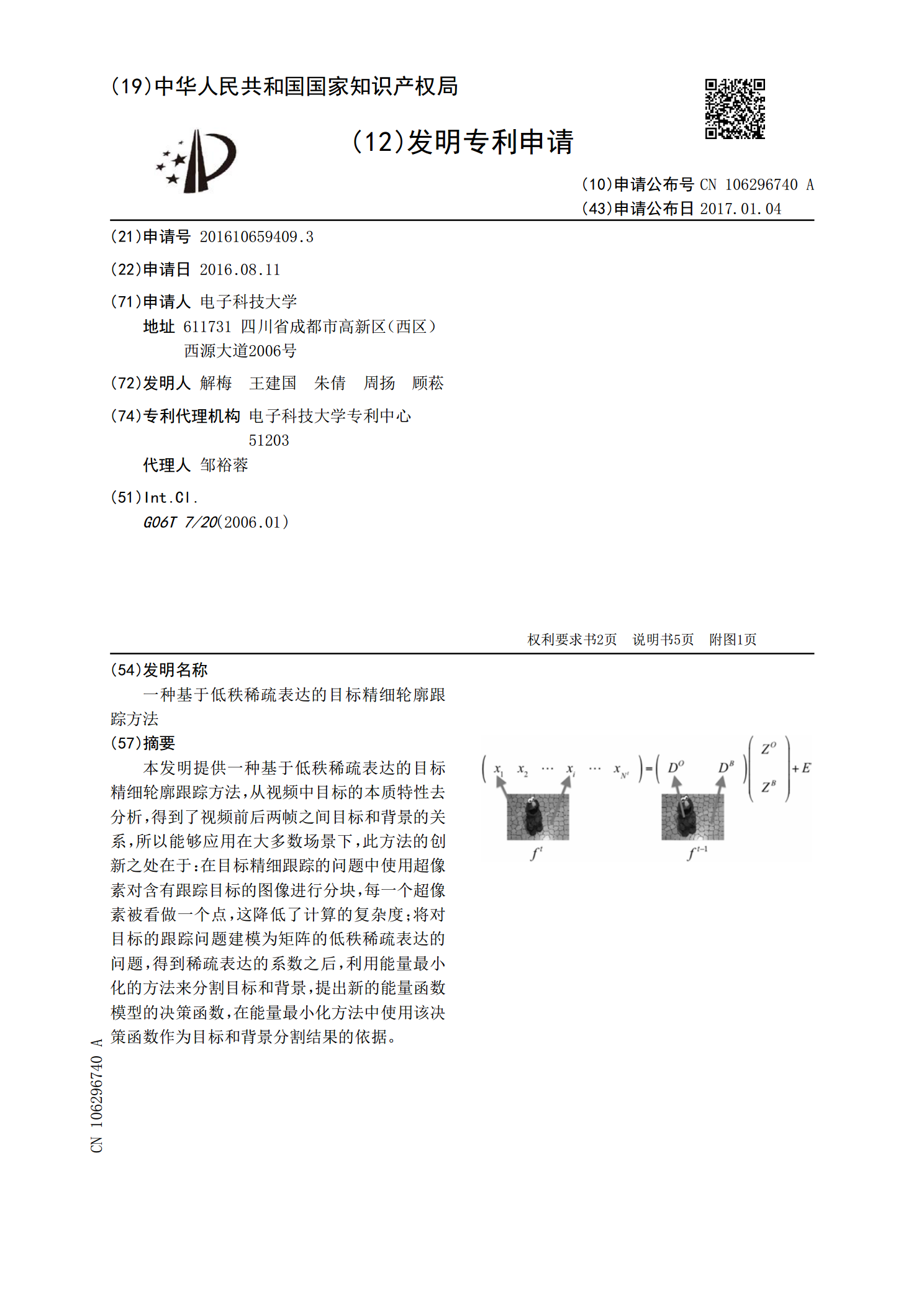
本发明提供一种基于低秩稀疏表达的目标精细轮廓跟踪方法,从视频中目标的本质特性去分析,得到了视频前后两帧之间目标和背景的关系,所以能够应用在大多数场景下,此方法的创新之处在于:在目标精细跟踪的问题中使用超像素对含有跟踪目标的图像进行分块,每一个超像素被看做一个点,这降低了计算的复杂度;将对目标的跟踪问题建模为矩阵的低秩稀疏表达的问题,得到稀疏表达的系数之后,利用能量最小化的方法来分割目标和背景,提出新的能量函数模型的决策函数,在能量最小化方法中使用该决策函数作为目标和背景分割结果的依据。