
一种具有轮腿变换装置的移动越障机器人.pdf

戊午****jj


1/7

2/7

3/7

4/7

5/7

6/7

7/7
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料
一种具有轮腿变换装置的移动越障机器人.pdf
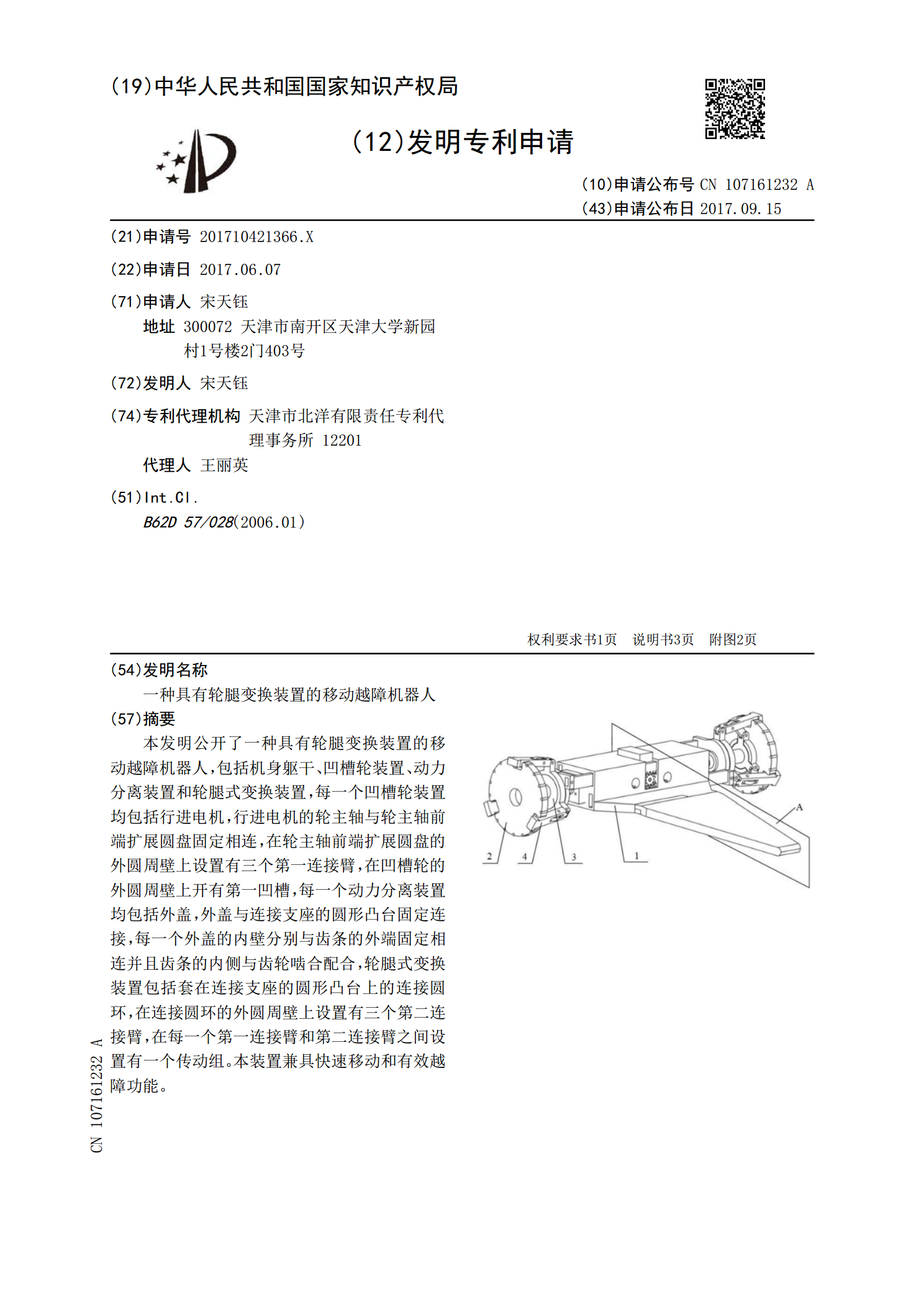
本发明公开了一种具有轮腿变换装置的移动越障机器人,包括机身躯干、凹槽轮装置、动力分离装置和轮腿式变换装置,每一个凹槽轮装置均包括行进电机,行进电机的轮主轴与轮主轴前端扩展圆盘固定相连,在轮主轴前端扩展圆盘的外圆周壁上设置有三个第一连接臂,在凹槽轮的外圆周壁上开有第一凹槽,每一个动力分离装置均包括外盖,外盖与连接支座的圆形凸台固定连接,每一个外盖的内壁分别与齿条的外端固定相连并且齿条的内侧与齿轮啮合配合,轮腿式变换装置包括套在连接支座的圆形凸台上的连接圆环,在连接圆环的外圆周壁上设置有三个第二连接臂,在每一

一种用于移动机器人的变位越障轮腿.pdf
本发明公开了一种用于移动机器人的变位越障轮腿,轮腿包括驱动装置、驱动装置壳体、支撑腿、移动轮。驱动装置包括驱动电动机、减速器、外螺纹丝杠、内螺纹丝杠从动件,支撑腿包括长支撑腿、短支撑腿,驱动电动机与减速器安装在驱动装置壳体的一端,长支撑腿一端铰接在内螺纹丝杠从动件上,底端安装有移动轮,内螺纹丝杠从动件啮合外螺纹丝杠,驱动电机旋转带动内螺纹丝杠从动件在外螺纹丝杠上沿着驱动装置壳体长度方向向外或向内移动,内螺纹丝杠从动件带动支撑腿移动来调整移动轮的垂直位置,本发明的创新点在于轮腿通过自身的变位变形即可调节移动

一种具有轮足变换能力的机器人变形腿.pdf
本发明涉及一种具有轮足变换能力的机器人变形腿,包括大腿半环和小腿半环,大腿半环和小腿半环合拢时为圆环,可作为车轮,实现轮式移动;小腿半环与大腿半环呈现一定夹角时,可作为大、小腿,实现足式行走。两种构型可随时变换,既可兼具轮、足两种移动形式的优点,同时也不增加腿结构的重量和控制的复杂程度,本发明可用于两足、四足或六足机器人。
一种新型轮腿复合式变位越障移动机器人.pdf
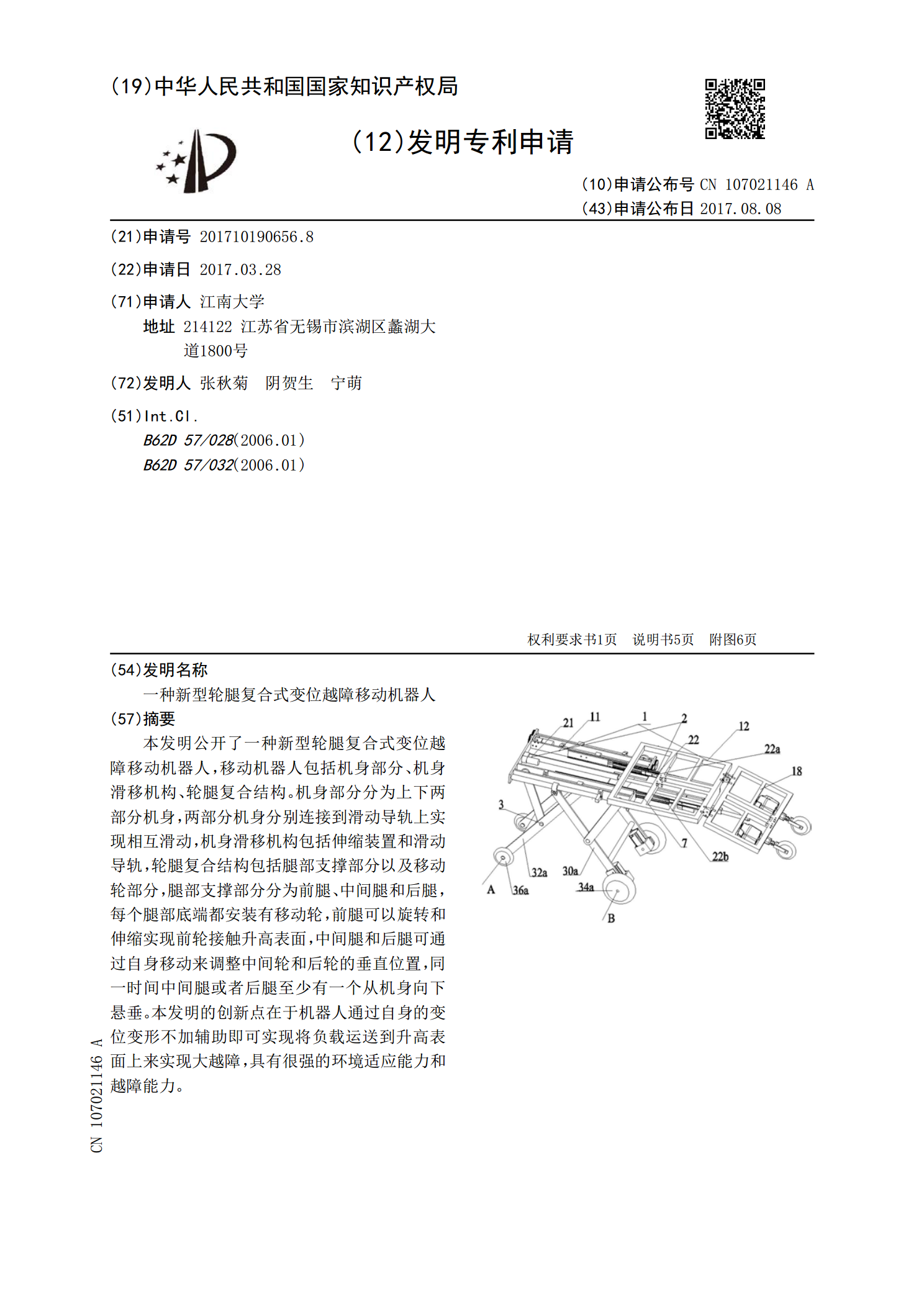
本发明公开了一种新型轮腿复合式变位越障移动机器人,移动机器人包括机身部分、机身滑移机构、轮腿复合结构。机身部分分为上下两部分机身,两部分机身分别连接到滑动导轨上实现相互滑动,机身滑移机构包括伸缩装置和滑动导轨,轮腿复合结构包括腿部支撑部分以及移动轮部分,腿部支撑部分分为前腿、中间腿和后腿,每个腿部底端都安装有移动轮,前腿可以旋转和伸缩实现前轮接触升高表面,中间腿和后腿可通过自身移动来调整中间轮和后轮的垂直位置,同一时间中间腿或者后腿至少有一个从机身向下悬垂。本发明的创新点在于机器人通过自身的变位变形不加辅

轮腿式越障机器人.pdf
本发明提供了一种轮腿式越障机器人,属于移动机器人领域,其包括相连接的机架和轮腿机构;轮腿机构包括机架关节、机械臂转向装置、机械臂、轮体转向装置和轮体装置;机械臂转向装置与机架关节转动连接,机械臂一端与机械臂转向装置连接,另一端连接轮体转向装置,轮体装置与轮体转向装置转动连接,机械臂包括伸缩驱动装置以及能够折叠变形的四边形机构,伸缩驱动装置的固定端和伸缩端分别连接四边形机构的对角线的两端。利用机械臂转向装置能够驱动机械臂水平转动,利用轮体转向装置能够驱动轮体装置水平转动,机械臂通过其自身的伸缩驱动装置实现沿