
一种多工位冲压上下料电气定位控制的智能旋臂机械手.pdf

莉娜****ua

1/6

2/6
3/6

4/6

5/6

6/6
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

一种多工位冲压上下料电气定位控制的智能旋臂机械手.pdf
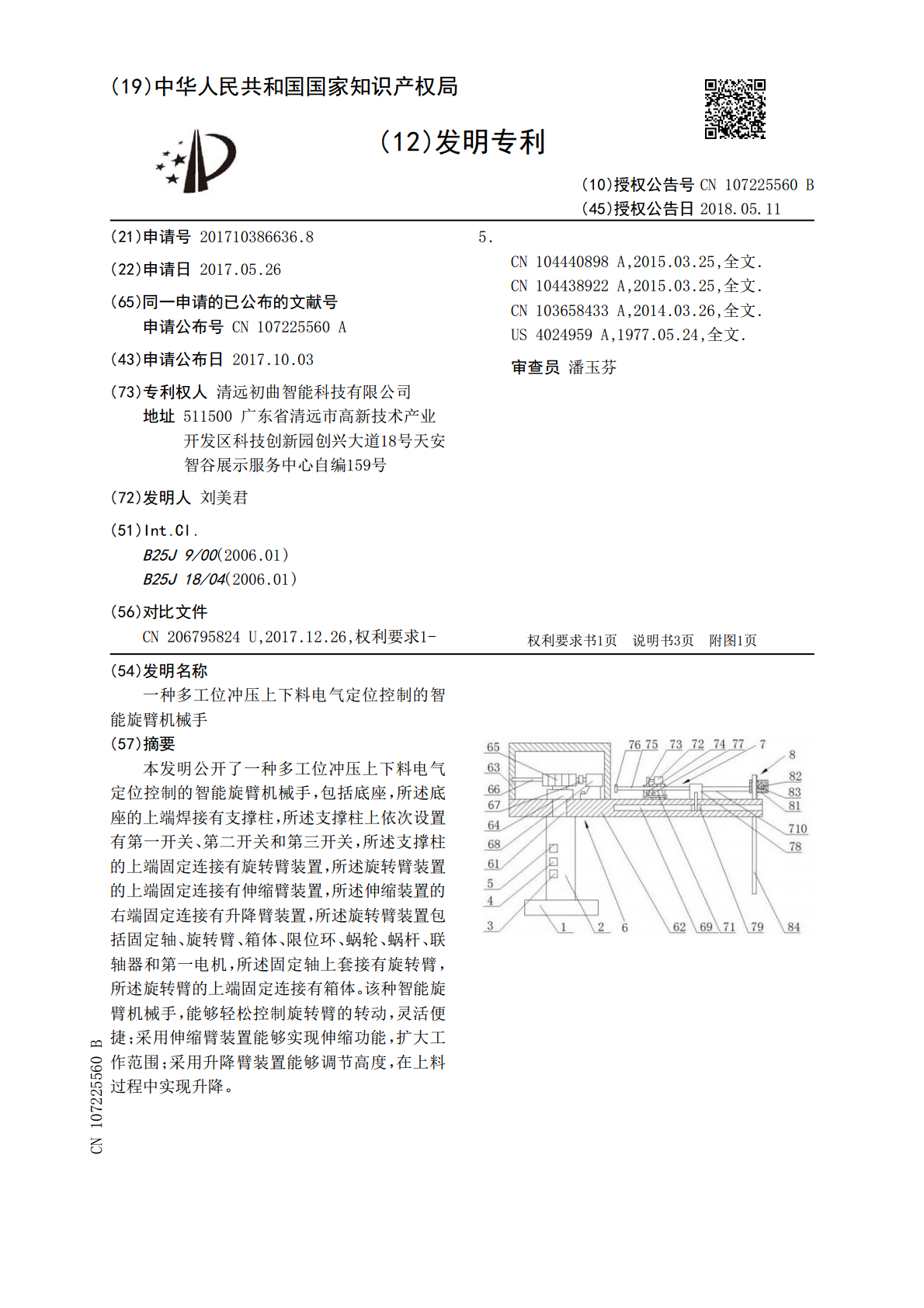
本发明公开了一种多工位冲压上下料电气定位控制的智能旋臂机械手,包括底座,所述底座的上端焊接有支撑柱,所述支撑柱上依次设置有第一开关、第二开关和第三开关,所述支撑柱的上端固定连接有旋转臂装置,所述旋转臂装置的上端固定连接有伸缩臂装置,所述伸缩装置的右端固定连接有升降臂装置,所述旋转臂装置包括固定轴、旋转臂、箱体、限位环、蜗轮、蜗杆、联轴器和第一电机,所述固定轴上套接有旋转臂,所述旋转臂的上端固定连接有箱体。该种智能旋臂机械手,能够轻松控制旋转臂的转动,灵活便捷;采用伸缩臂装置能够实现伸缩功能,扩大工作范围;
一种多工位上下料机械手.pdf
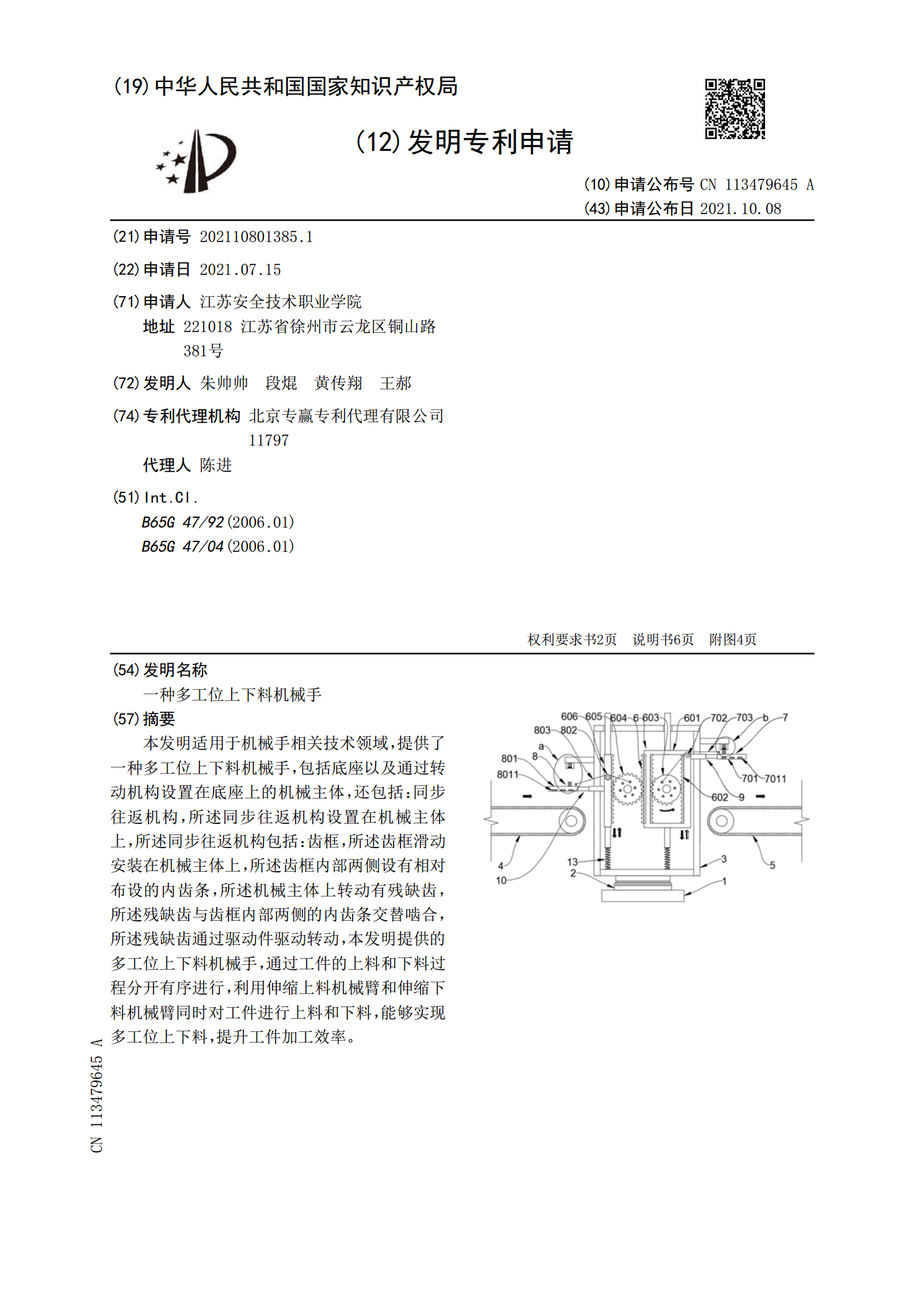
本发明适用于机械手相关技术领域,提供了一种多工位上下料机械手,包括底座以及通过转动机构设置在底座上的机械主体,还包括:同步往返机构,所述同步往返机构设置在机械主体上,所述同步往返机构包括:齿框,所述齿框滑动安装在机械主体上,所述齿框内部两侧设有相对布设的内齿条,所述机械主体上转动有残缺齿,所述残缺齿与齿框内部两侧的内齿条交替啮合,所述残缺齿通过驱动件驱动转动,本发明提供的多工位上下料机械手,通过工件的上料和下料过程分开有序进行,利用伸缩上料机械臂和伸缩下料机械臂同时对工件进行上料和下料,能够实现多工位上下

一种翻转式多工位上下料机械手.pdf
一种翻转式多工位上下料机械手,包括料盒、第一翻转机构、第二翻转机构、Z轴驱动机构、Y轴驱动机构、加工台和复数个吸附机构,料盒内设有复数个排序腔,排序腔内竖立排列放置待加工面板和已加工面板,待加工面板与已加工面板之间留有取料空间,加工台沿面板排列方向设于料盒的后方,Y轴驱动机构沿面板排列方向设于料盒的一侧,Y轴驱动机构与Z轴驱动机构连接,Z轴驱动机构与第一翻转机构连接,第一翻转机构悬空于料盒的上方,第二翻转机构设于第一翻转机构上,吸附机构与第二翻转机构连接。本发明结构合理,能实现多工位上下料,精度高、加工效

多工位碾环机上下料机械臂.pdf
本发明提供了多工位碾环机上下料机械臂,包括两个平行设置的主支架,两个主支架的上端连接有同一个横梁,横梁上连接有两个相隔一定距离的立柱,其特征在于:立柱上连接有驱动平台,驱动平台的一侧滑动连接有驱动臂,驱动臂的侧壁上连接有至少一个夹紧手爪,同时驱动臂靠近夹紧手爪一侧的端部位置连接有拨料手爪;两个主支架之间还连接有加强梁。本发明克服了现有技术的不足,设计合理,结构紧凑,能够实现多工位同时加工,提高工作效率,同时实现自动送料、分拣、上料、输送碾环以及碾环后拨动下料的过程,整个过程更加智能,而且稳定性空间布局合理
一种冲压电气上下料自动化机械手.pdf
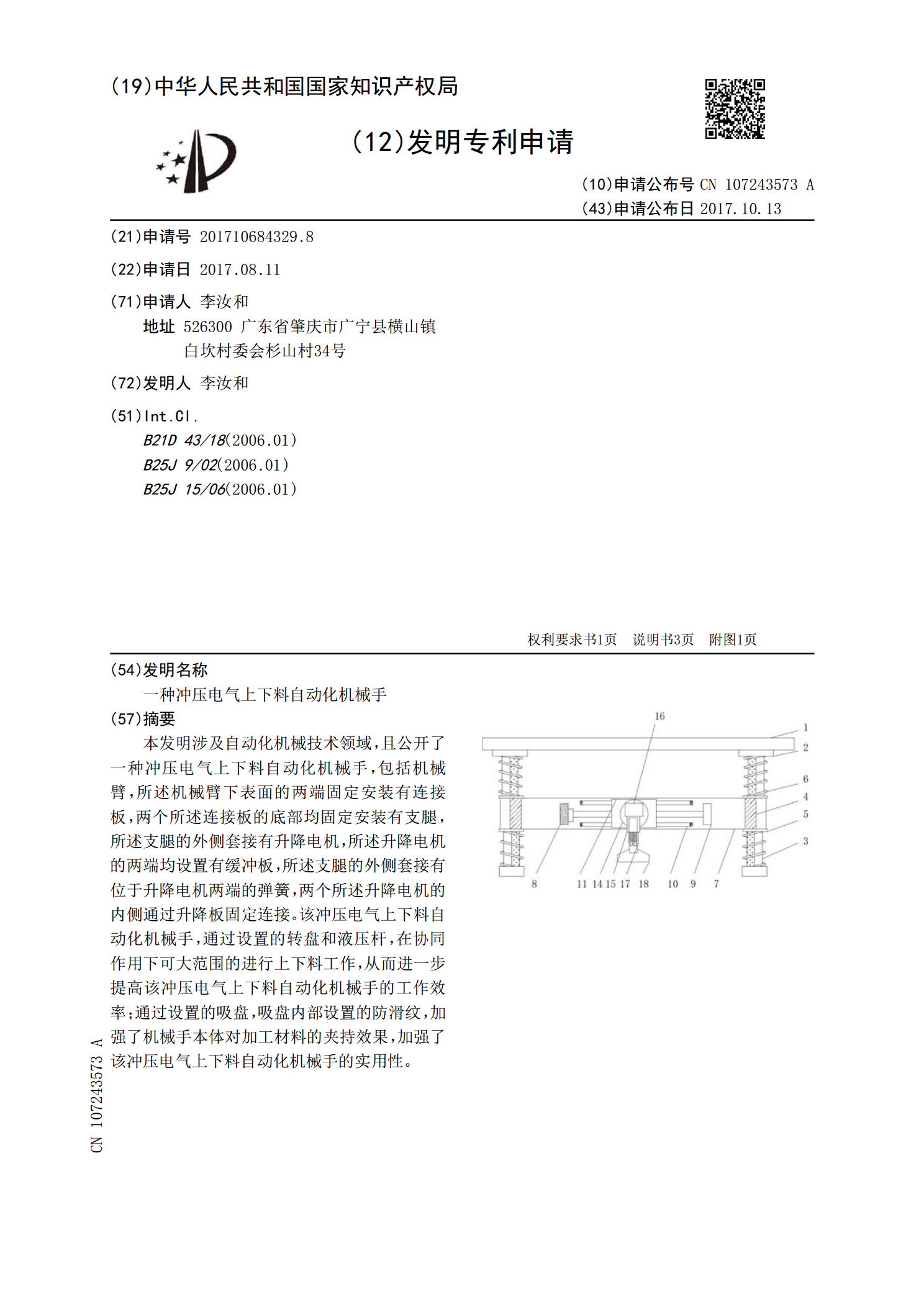
本发明涉及自动化机械技术领域,且公开了一种冲压电气上下料自动化机械手,包括机械臂,所述机械臂下表面的两端固定安装有连接板,两个所述连接板的底部均固定安装有支腿,所述支腿的外侧套接有升降电机,所述升降电机的两端均设置有缓冲板,所述支腿的外侧套接有位于升降电机两端的弹簧,两个所述升降电机的内侧通过升降板固定连接。该冲压电气上下料自动化机械手,通过设置的转盘和液压杆,在协同作用下可大范围的进行上下料工作,从而进一步提高该冲压电气上下料自动化机械手的工作效率;通过设置的吸盘,吸盘内部设置的防滑纹,加强了机械手本体