
一种可旋转式电路板自动抓取机器人.pdf

贤惠****66


1/6

2/6
3/6

4/6

5/6

6/6
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料
一种可旋转式电路板自动抓取机器人.pdf
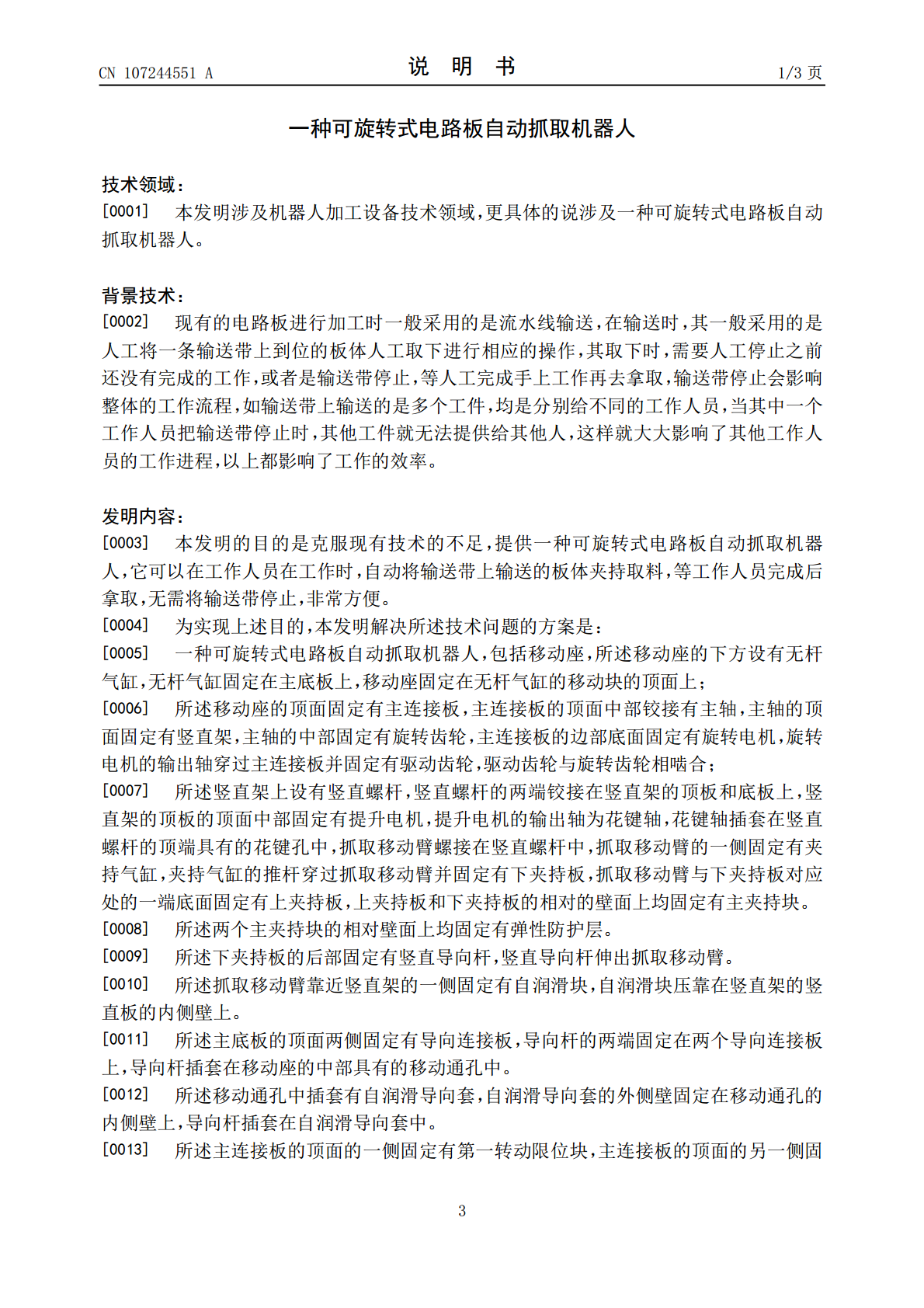
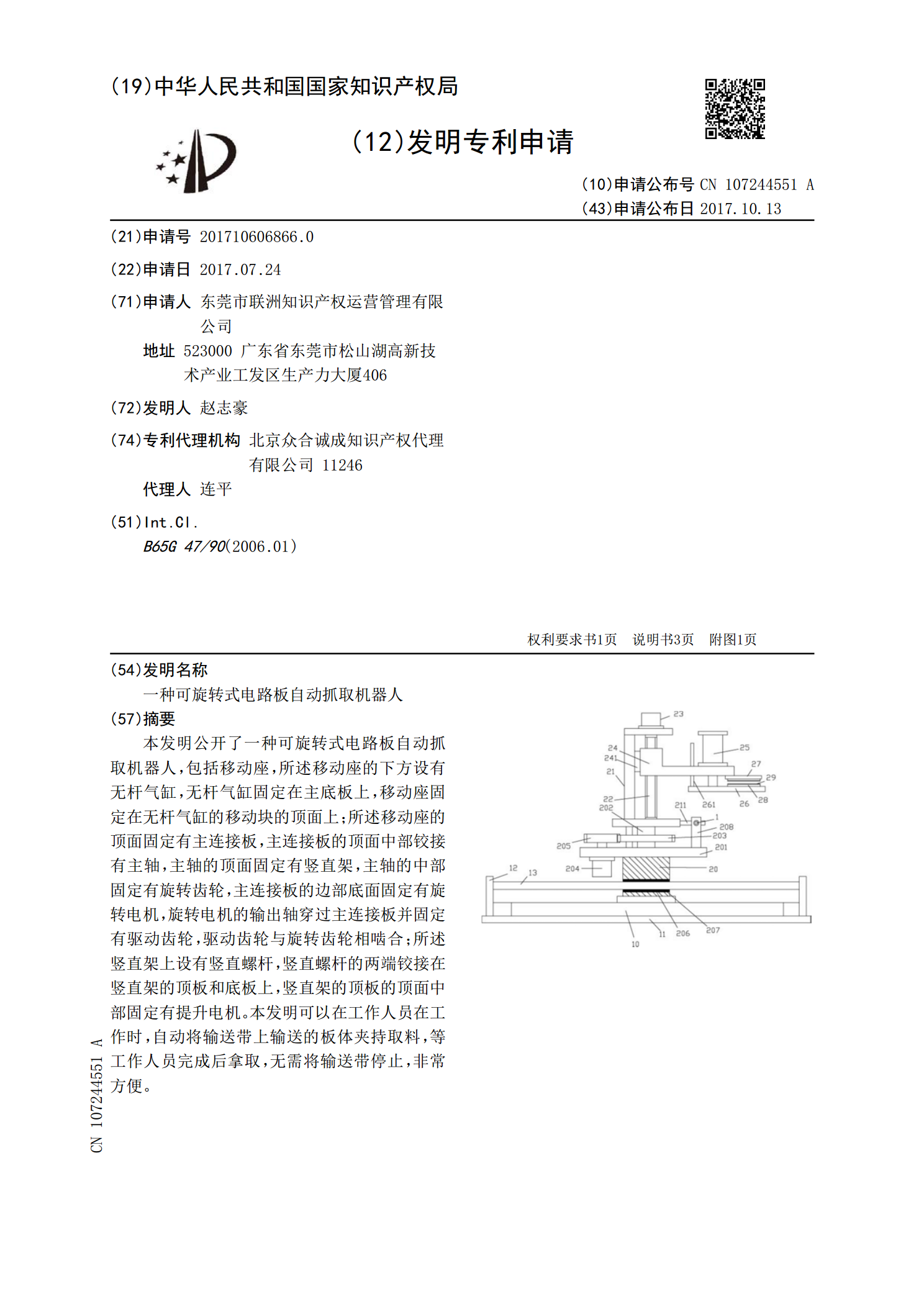
本发明公开了一种可旋转式电路板自动抓取机器人,包括移动座,所述移动座的下方设有无杆气缸,无杆气缸固定在主底板上,移动座固定在无杆气缸的移动块的顶面上;所述移动座的顶面固定有主连接板,主连接板的顶面中部铰接有主轴,主轴的顶面固定有竖直架,主轴的中部固定有旋转齿轮,主连接板的边部底面固定有旋转电机,旋转电机的输出轴穿过主连接板并固定有驱动齿轮,驱动齿轮与旋转齿轮相啮合;所述竖直架上设有竖直螺杆,竖直螺杆的两端铰接在竖直架的顶板和底板上,竖直架的顶板的顶面中部固定有提升电机。本发明可以在工作人员在工作时,自动将

一种自动抓取的搬运机器人.pdf
本发明提供一种自动抓取的搬运机器人,涉及智能机器人领域,包括基座,基座的顶部固定安装有转动箱,转动箱内腔的底部固定安装有第一电机,第一电机通过其一端的转轴传动连接有主动轮,电机的左侧设置有转动轴,转动轴中部的外表面固定安装有与主动轮相啮合的从动轮。该自动抓取的搬运机器人,通过在连接板的底部固定安装吸盘,能使该装置在抓取物品时,先通过吸盘将物品稍稍提起,再通过连接箱两侧铰接的连接杆相互靠近,使左夹板和右夹板相互闭合,可以防止搬运的物品过重,使吸盘掉落,避免物品掉落到地上,导致损坏,通过在支撑板的底部安装栏杆

一种机器人的可旋转抓取装置用抓取组件.pdf
本发明涉及一种机器人的可旋转抓取装置用抓取组件,包括均布于旋转盘下方的四个抓取件和四个伸缩气缸;抓取件包括可形成负压腔的环形吸嘴和自环形吸嘴上端部向连接板方向延伸的加强块,加强块内预埋一连接管;连接管内设有一延伸至负压腔的气体通道,环形吸嘴与待抓取物的光滑上表面接触,环形吸嘴内的气体由气体通道抽出,形成用于吸附待抓取物的真空区域;四个抓取件分别通过一伸缩气缸与旋转盘的下端面连接,旋转盘包括用于安装抓取件的盘体、固设在盘体与槽轮之间的凸台;伸缩气缸的缸体与盘体连接,伸缩气缸的伸缩杆与加强块的外壁固定连接。本

一种便携式电路板用自动抓取装置.pdf
本发明公开了一种便携式电路板用自动抓取装置,其结构包括机体、可升降把手、对称合页、安全锁扣、第一门板、支撑脚垫、万向轮、底板、第二门板、箱门、拉手、箱盖、锁扣,机体的底面4个角部位上均固定有支撑脚垫,支撑脚垫安装有4个并且均为圆形结构,机体的底面中心位置与底板固定连接,底板的一侧两端通过对称合页与第一门板的一侧进行铰链连接,本发明一种便携式电路板用自动抓取装置,该装置采用行李箱的结构进行设计,同时可进行水平、垂直、纵向水平不同方位的电路板进行自动抓取,功能性齐全,便于作业员对装置的携带,便于作业员的使用,
一种铁质冲压板自动抓取机器人.pdf
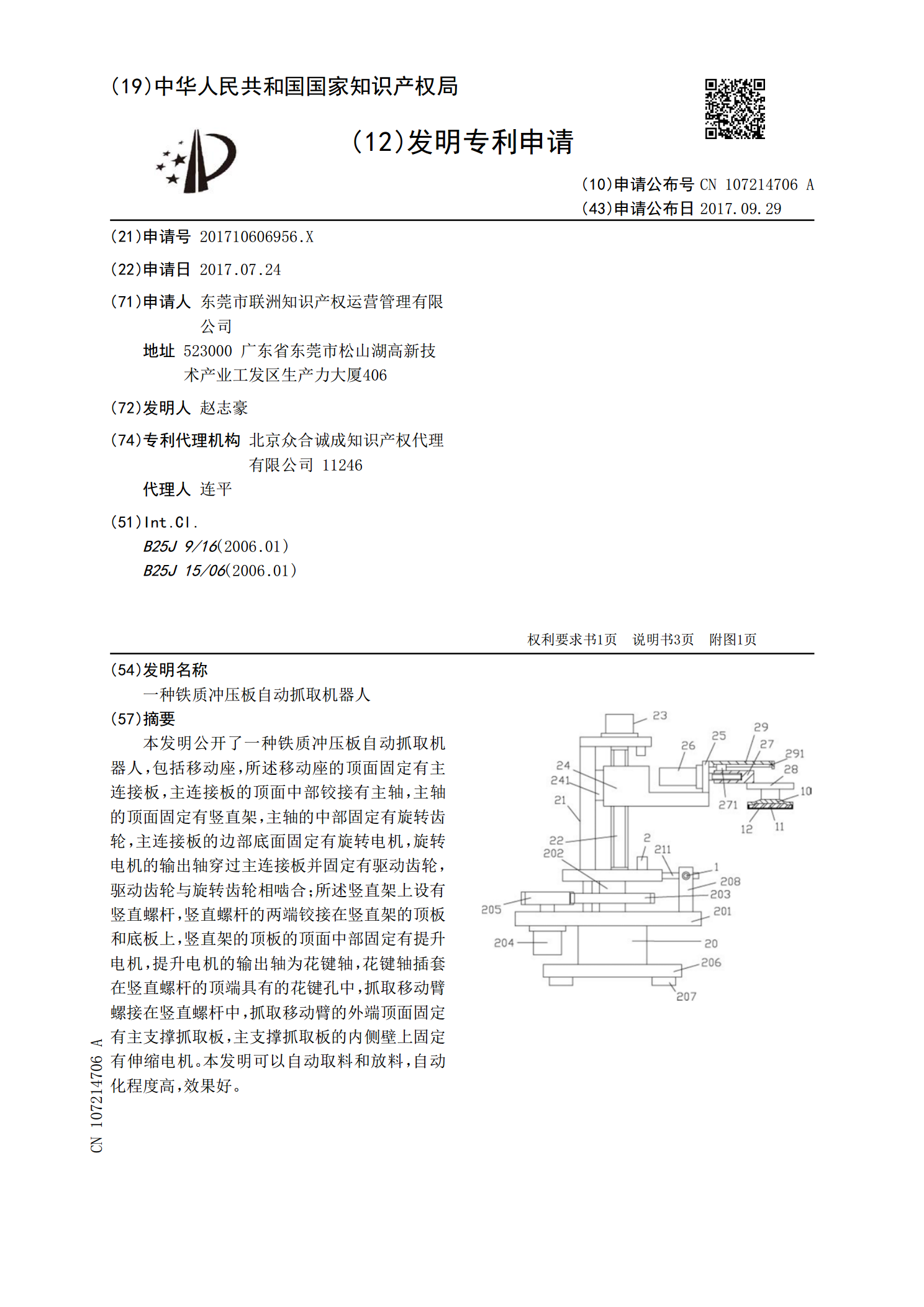
本发明公开了一种铁质冲压板自动抓取机器人,包括移动座,所述移动座的顶面固定有主连接板,主连接板的顶面中部铰接有主轴,主轴的顶面固定有竖直架,主轴的中部固定有旋转齿轮,主连接板的边部底面固定有旋转电机,旋转电机的输出轴穿过主连接板并固定有驱动齿轮,驱动齿轮与旋转齿轮相啮合;所述竖直架上设有竖直螺杆,竖直螺杆的两端铰接在竖直架的顶板和底板上,竖直架的顶板的顶面中部固定有提升电机,提升电机的输出轴为花键轴,花键轴插套在竖直螺杆的顶端具有的花键孔中,抓取移动臂螺接在竖直螺杆中,抓取移动臂的外端顶面固定有主支撑抓取