
分段点自动提取的踏面轮廓拟合方法.pdf

努力****爱敏

1/10
2/10
3/10
4/10
5/10
6/10
7/10
8/10
9/10
10/10
亲,该文档总共16页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

分段点自动提取的踏面轮廓拟合方法.pdf
本发明公开了一种分段点自动提取的踏面轮廓拟合方法,包括如下步骤:根据镜面对称方式,在轨道内、外侧安装激光位移传感器;获取踏面探测点的坐标数据,并将各自的所述坐标数据转换至平行于轨道方向的铅垂面的坐标系;对两激光位移传感器对应的所述转换后的坐标数据进行融合至同一坐标中;特征点提取;根据所述提取的特征点,确定初始分段区间;根据所述初始分段区间进行曲线拟合,并求取拟合决定系数;根据所述拟合确定系数与预设曲线拟合决定系数的阈值进行比较,确定精确分段点;根据所述精确分段点,确定拟合区间,并且分别对每个区间进行曲线拟
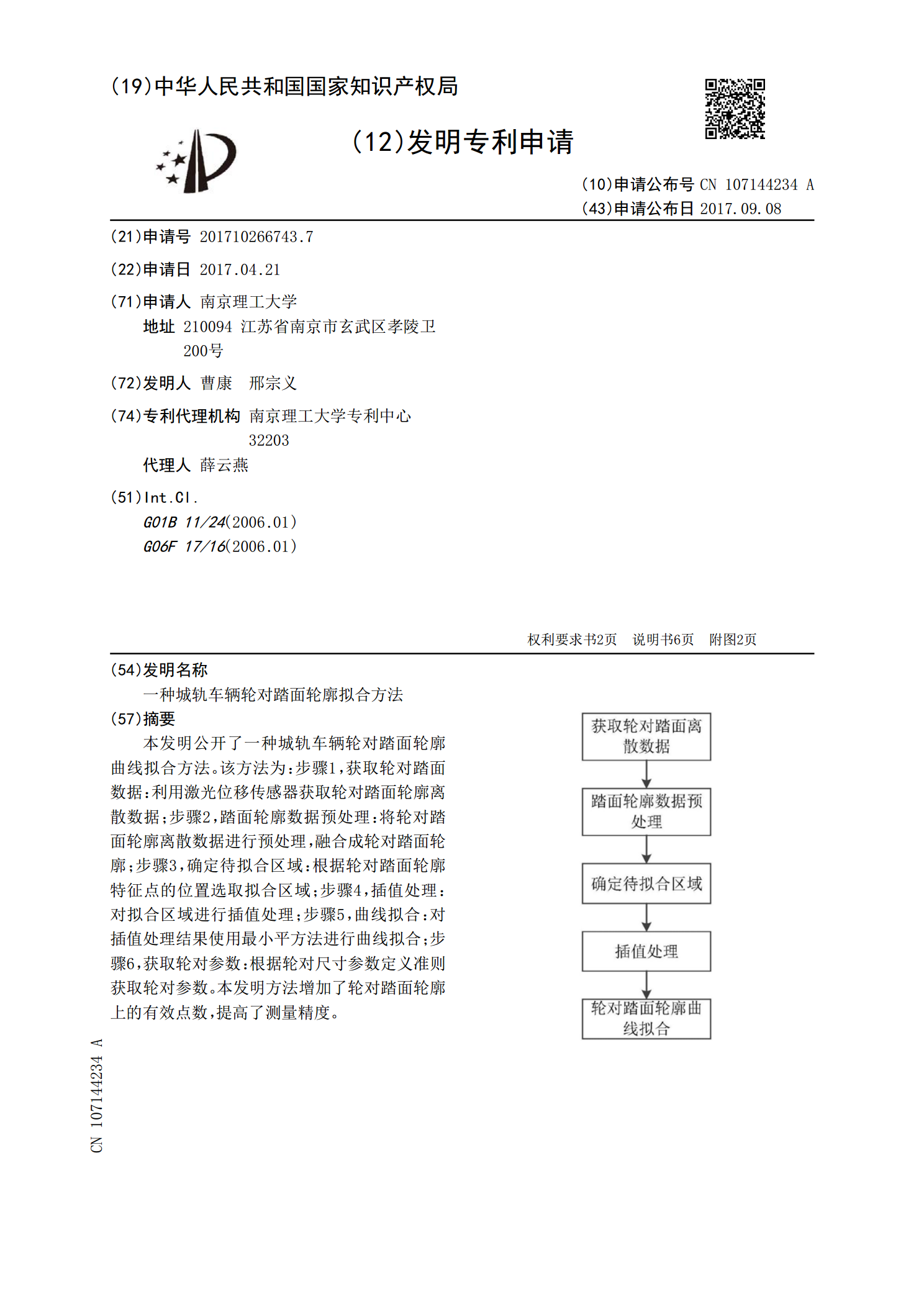
一种城轨车辆轮对踏面轮廓拟合方法.pdf
本发明公开了一种城轨车辆轮对踏面轮廓曲线拟合方法。该方法为:步骤1,获取轮对踏面数据:利用激光位移传感器获取轮对踏面轮廓离散数据;步骤2,踏面轮廓数据预处理:将轮对踏面轮廓离散数据进行预处理,融合成轮对踏面轮廓;步骤3,确定待拟合区域:根据轮对踏面轮廓特征点的位置选取拟合区域;步骤4,插值处理:对拟合区域进行插值处理;步骤5,曲线拟合:对插值处理结果使用最小平方法进行曲线拟合;步骤6,获取轮对参数:根据轮对尺寸参数定义准则获取轮对参数。本发明方法增加了轮对踏面轮廓上的有效点数,提高了测量精度。

基于图像的轮对踏面轮廓测量方法.docx
基于图像的轮对踏面轮廓测量方法基于图像的轮对踏面轮廓测量方法摘要:轮对是铁路车辆中重要的组成部分之一,其踏面的状况直接影响到行车安全和铁路设施的使用寿命。传统的轮对踏面轮廓测量方法需要专用设备和人工操作,且效率低下。本文则提出了一种基于图像的轮对踏面轮廓测量方法,利用计算机视觉技术和图像处理算法实现自动化测量,提高了测量精度和效率。通过实验验证了该方法的可行性和准确性。关键词:轮对;踏面轮廓;图像处理;计算机视觉;测量方法1.引言轮对是铁路车辆中重要的组成部分之一,负责支撑车体和传递车辆重量。由于长期的使
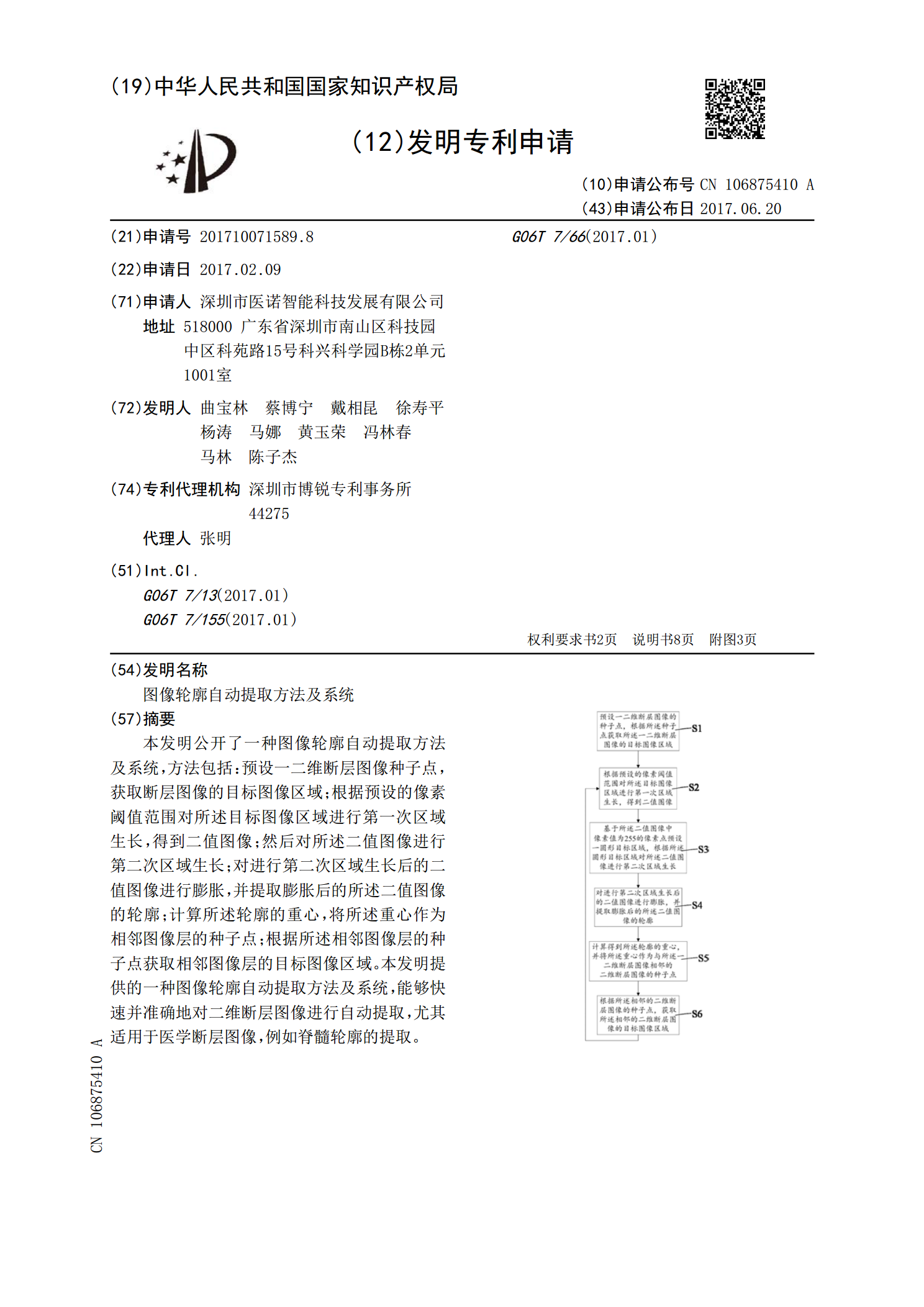
图像轮廓自动提取方法及系统.pdf
本发明公开了一种图像轮廓自动提取方法及系统,方法包括:预设一二维断层图像种子点,获取断层图像的目标图像区域;根据预设的像素阈值范围对所述目标图像区域进行第一次区域生长,得到二值图像;然后对所述二值图像进行第二次区域生长;对进行第二次区域生长后的二值图像进行膨胀,并提取膨胀后的所述二值图像的轮廓;计算所述轮廓的重心,将所述重心作为相邻图像层的种子点;根据所述相邻图像层的种子点获取相邻图像层的目标图像区域。本发明提供的一种图像轮廓自动提取方法及系统,能够快速并准确地对二维断层图像进行自动提取,尤其适用于医学断
基于既有轮廓线的轮对踏面轮廓曲线补合方法.pdf
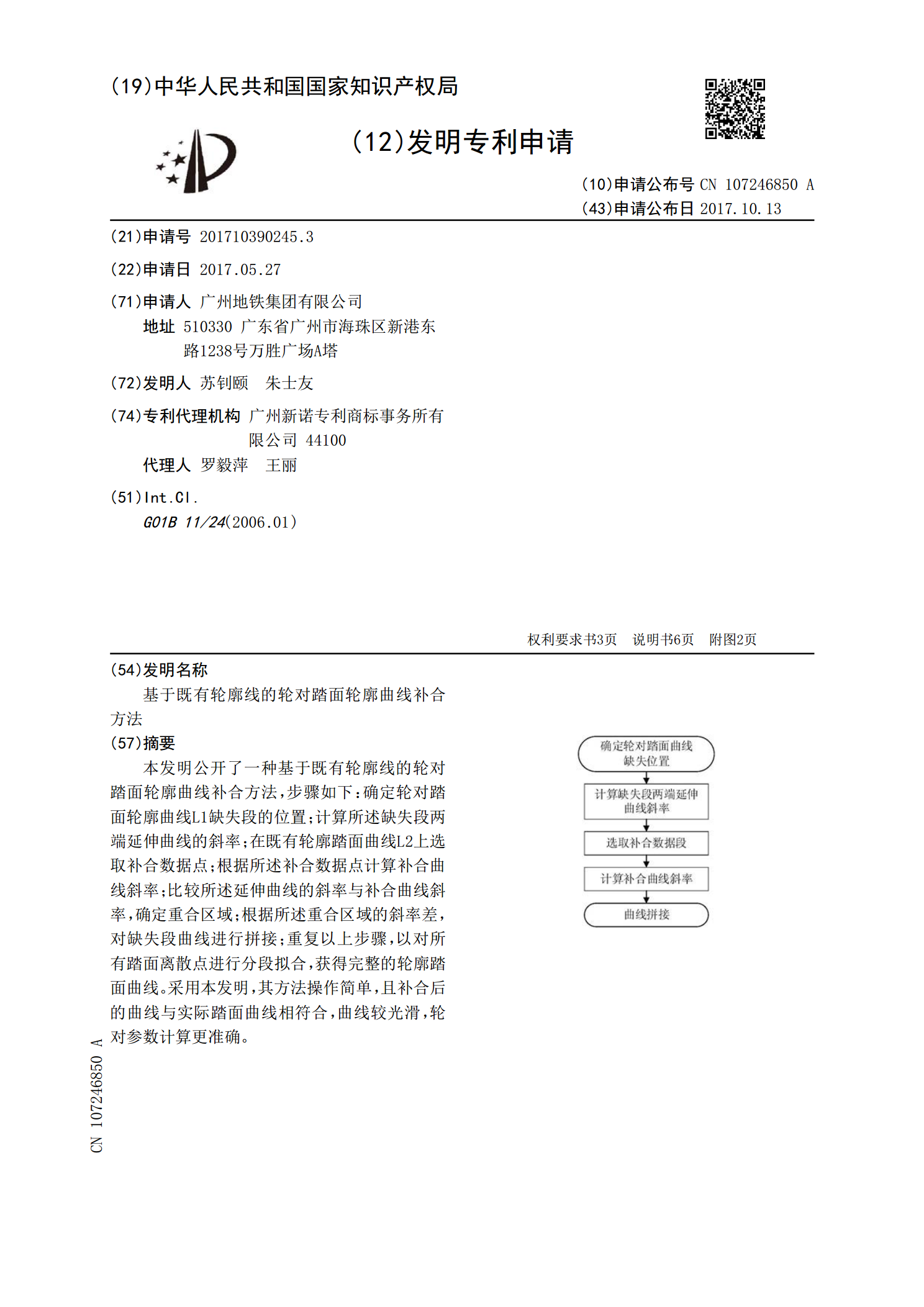
本发明公开了一种基于既有轮廓线的轮对踏面轮廓曲线补合方法,步骤如下:确定轮对踏面轮廓曲线L1缺失段的位置;计算所述缺失段两端延伸曲线的斜率;在既有轮廓踏面曲线L2上选取补合数据点;根据所述补合数据点计算补合曲线斜率;比较所述延伸曲线的斜率与补合曲线斜率,确定重合区域;根据所述重合区域的斜率差,对缺失段曲线进行拼接;重复以上步骤,以对所有踏面离散点进行分段拟合,获得完整的轮廓踏面曲线。采用本发明,其方法操作简单,且补合后的曲线与实际踏面曲线相符合,曲线较光滑,轮对参数计算更准确。