
一种用于关节机器人的关节装置.pdf

康平****ng

1/9
2/9
3/9
4/9
5/9
6/9
7/9
8/9
9/9
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料
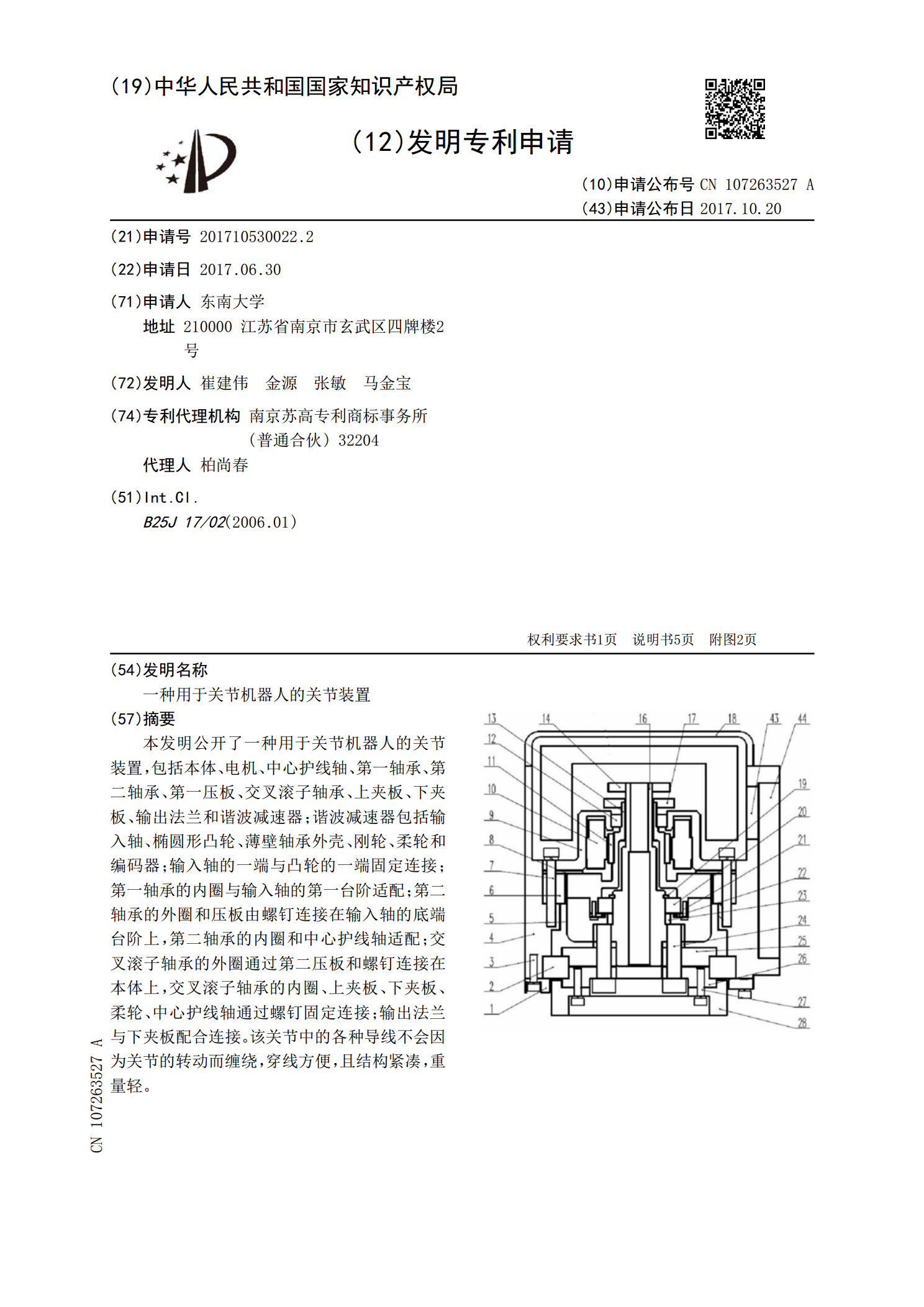
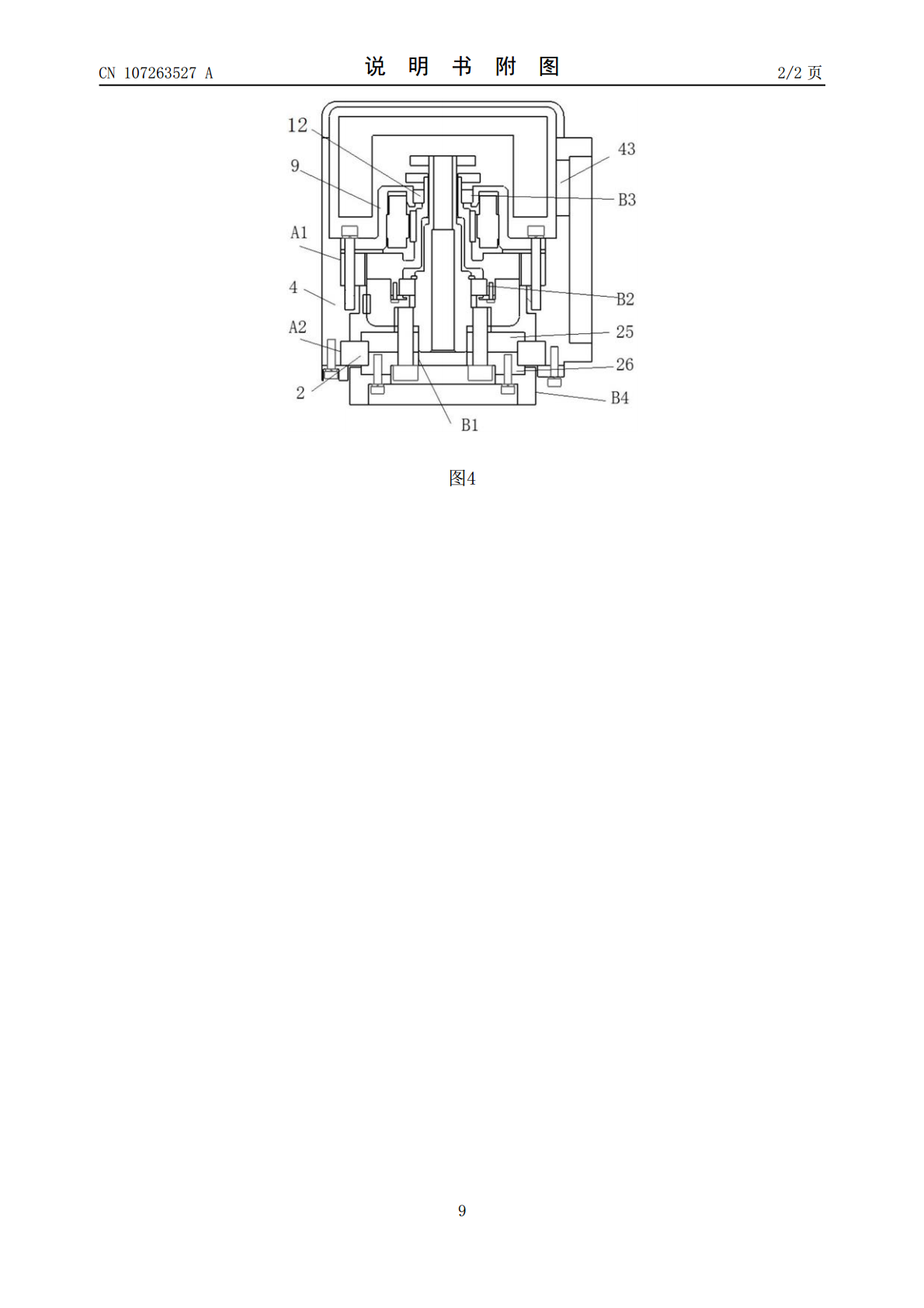
一种用于关节机器人的关节装置.pdf
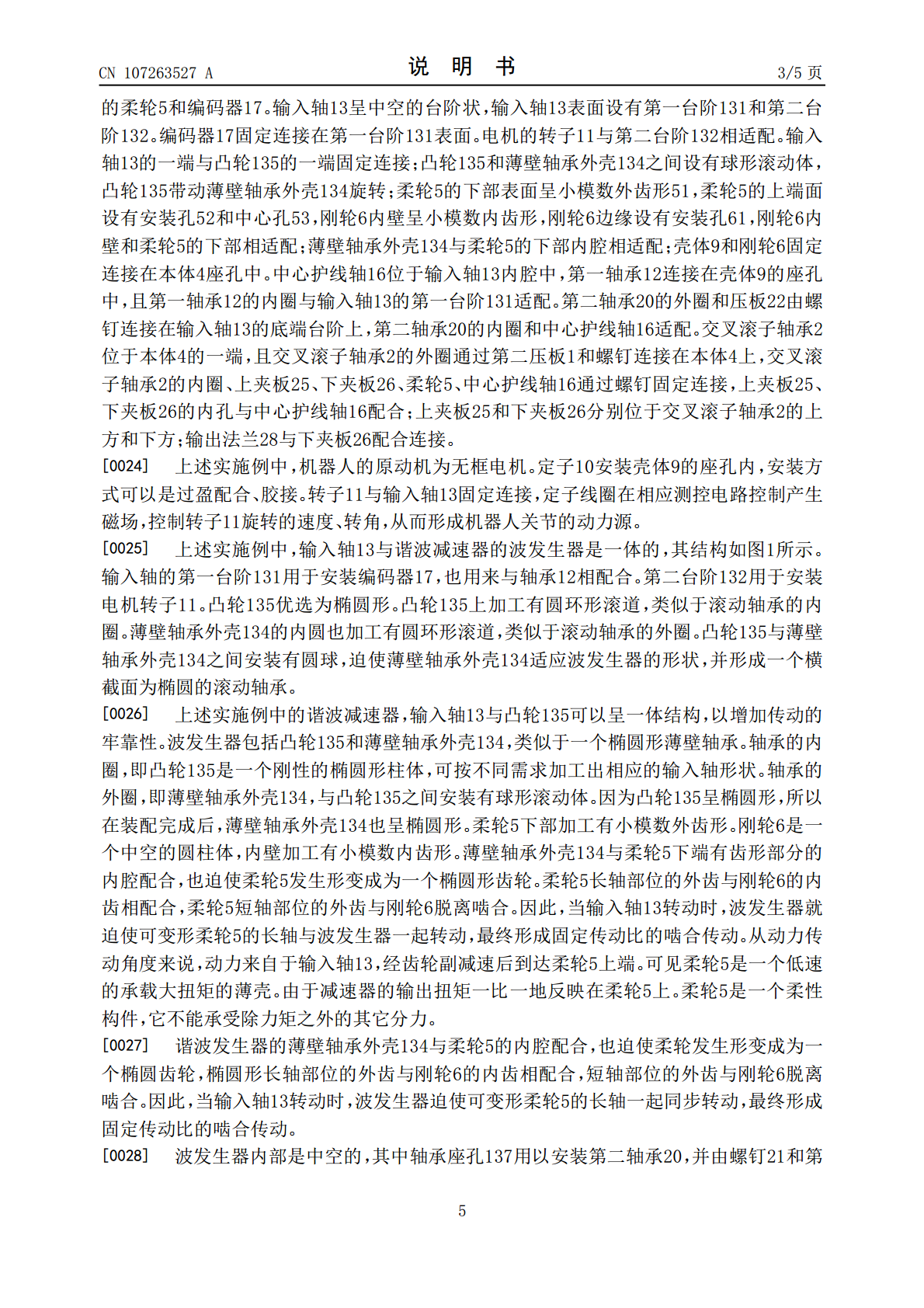
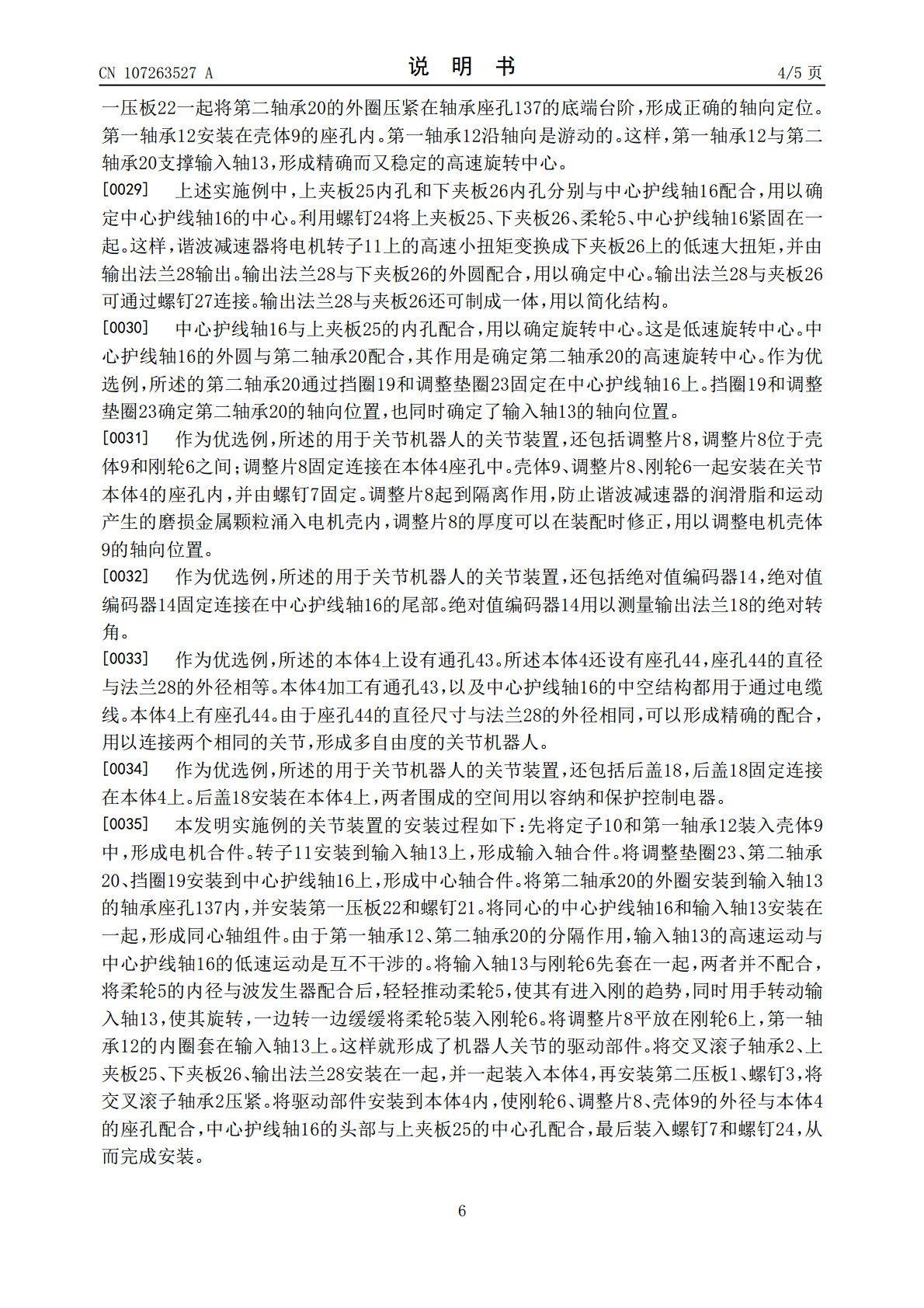
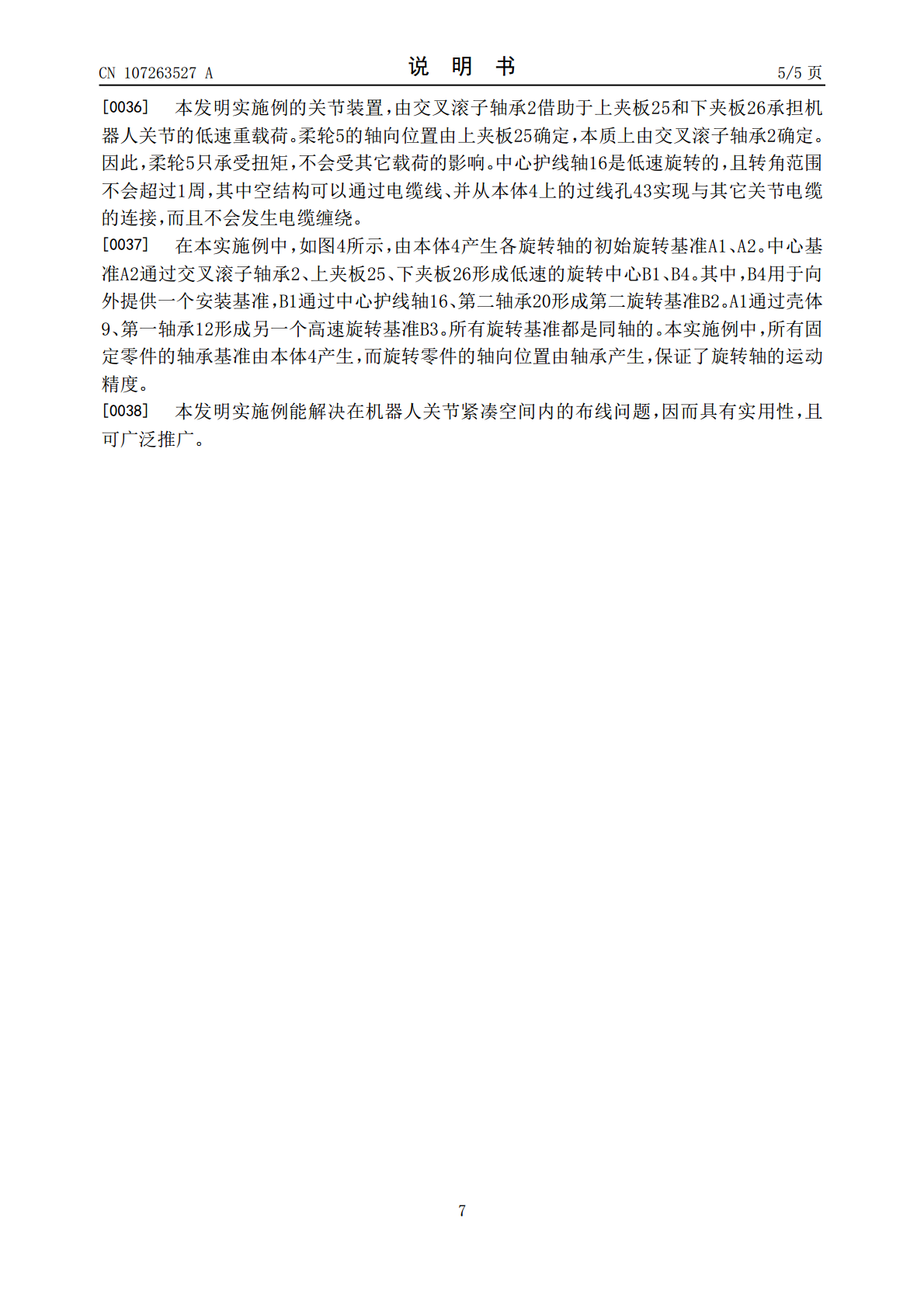
本发明公开了一种用于关节机器人的关节装置,包括本体、电机、中心护线轴、第一轴承、第二轴承、第一压板、交叉滚子轴承、上夹板、下夹板、输出法兰和谐波减速器;谐波减速器包括输入轴、椭圆形凸轮、薄壁轴承外壳、刚轮、柔轮和编码器;输入轴的一端与凸轮的一端固定连接;第一轴承的内圈与输入轴的第一台阶适配;第二轴承的外圈和压板由螺钉连接在输入轴的底端台阶上,第二轴承的内圈和中心护线轴适配;交叉滚子轴承的外圈通过第二压板和螺钉连接在本体上,交叉滚子轴承的内圈、上夹板、下夹板、柔轮、中心护线轴通过螺钉固定连接;输出法兰与下夹

一种用于机器人关节的传动装置.pdf
本发明公开了一种用于机器人关节的传动装置,采用两级少齿差摆线针轮传动,针齿盘通过第一滚针轴承与输入曲轴固连,第二摆线轮固连在输入曲轴中间部位,且与第二滚针轴承外圈连接,输入曲轴另一端有键槽和孔用于传输转矩;第一摆线轮与传动曲轴固连,且与针齿盘上的针齿啮合;第二摆线轮与针轮啮合,第二摆线轮上均布三个梯形孔,支撑盘上对应有三个梯形突起,梯形突起的顶部有螺孔和输出盘固连;三根传动曲轴带动支撑盘与输出盘进行反向低速转动,支撑盘与针轮通过主轴承连接,输出盘上均布多个输出螺孔与输出杆件连接输出转矩。传动装置采用两级少

一种用于驱动机器人关节转动的装置.pdf
本发明公开了一种用于驱动机器人关节转动的装置,它包括齿轮转动机构、驱动齿轮转动机构转动的液压驱动机构,待转动机器人关节与齿轮转动机构固定相连。液压驱动机构包括第一液压缸、第二液压缸以及分别驱动第一液压缸和第二液压缸内活塞向相反的方向运动的驱动装置。齿轮转动机构包括齿轮以及平行设置的第一齿条和第二齿条,第一液压缸内活塞背离第一连接管的一侧与第一齿条一端固定相连,第二液压缸内活塞背离第二连接管的一侧与第二齿条一端固定相连,且齿轮分别与第一齿条和第二齿条相啮合。本发明相比现有技术,在能驱动机器人关节转动的前提下
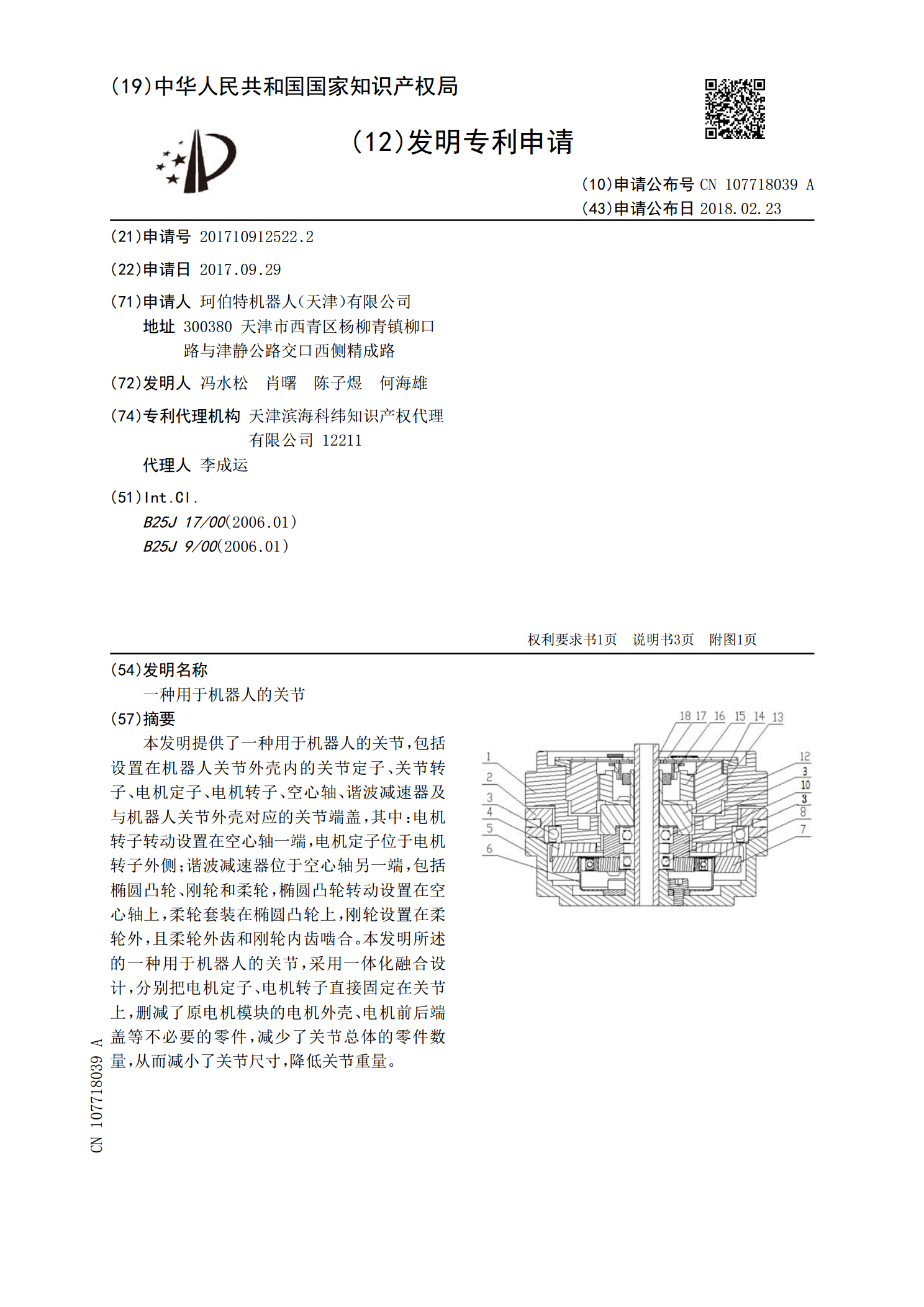
一种用于机器人的关节.pdf
本发明提供了一种用于机器人的关节,包括设置在机器人关节外壳内的关节定子、关节转子、电机定子、电机转子、空心轴、谐波减速器及与机器人关节外壳对应的关节端盖,其中:电机转子转动设置在空心轴一端,电机定子位于电机转子外侧;谐波减速器位于空心轴另一端,包括椭圆凸轮、刚轮和柔轮,椭圆凸轮转动设置在空心轴上,柔轮套装在椭圆凸轮上,刚轮设置在柔轮外,且柔轮外齿和刚轮内齿啮合。本发明所述的一种用于机器人的关节,采用一体化融合设计,分别把电机定子、电机转子直接固定在关节上,删减了原电机模块的电机外壳、电机前后端盖等不必要的
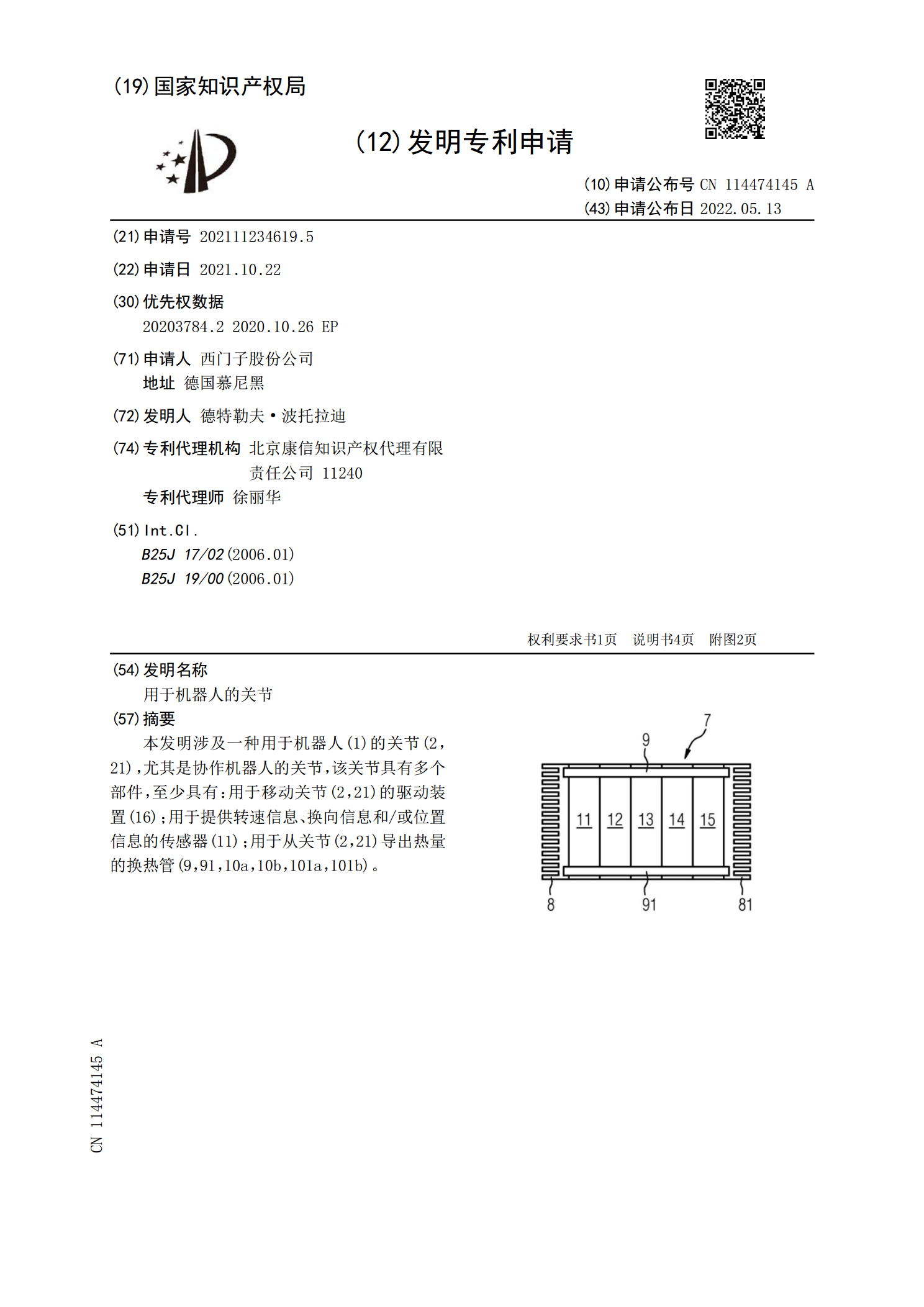
用于机器人的关节.pdf
本发明涉及一种用于机器人(1)的关节(2,21),尤其是协作机器人的关节,该关节具有多个部件,至少具有:用于移动关节(2,21)的驱动装置(16);用于提供转速信息、换向信息和/或位置信息的传感器(11);用于从关节(2,21)导出热量的换热管(9,91,10a,10b,101a,101b)。