
用于机器人的关节.pdf

猫巷****熙柔

1/8
2/8
3/8
4/8
5/8
6/8
7/8
8/8
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料
用于机器人的关节.pdf
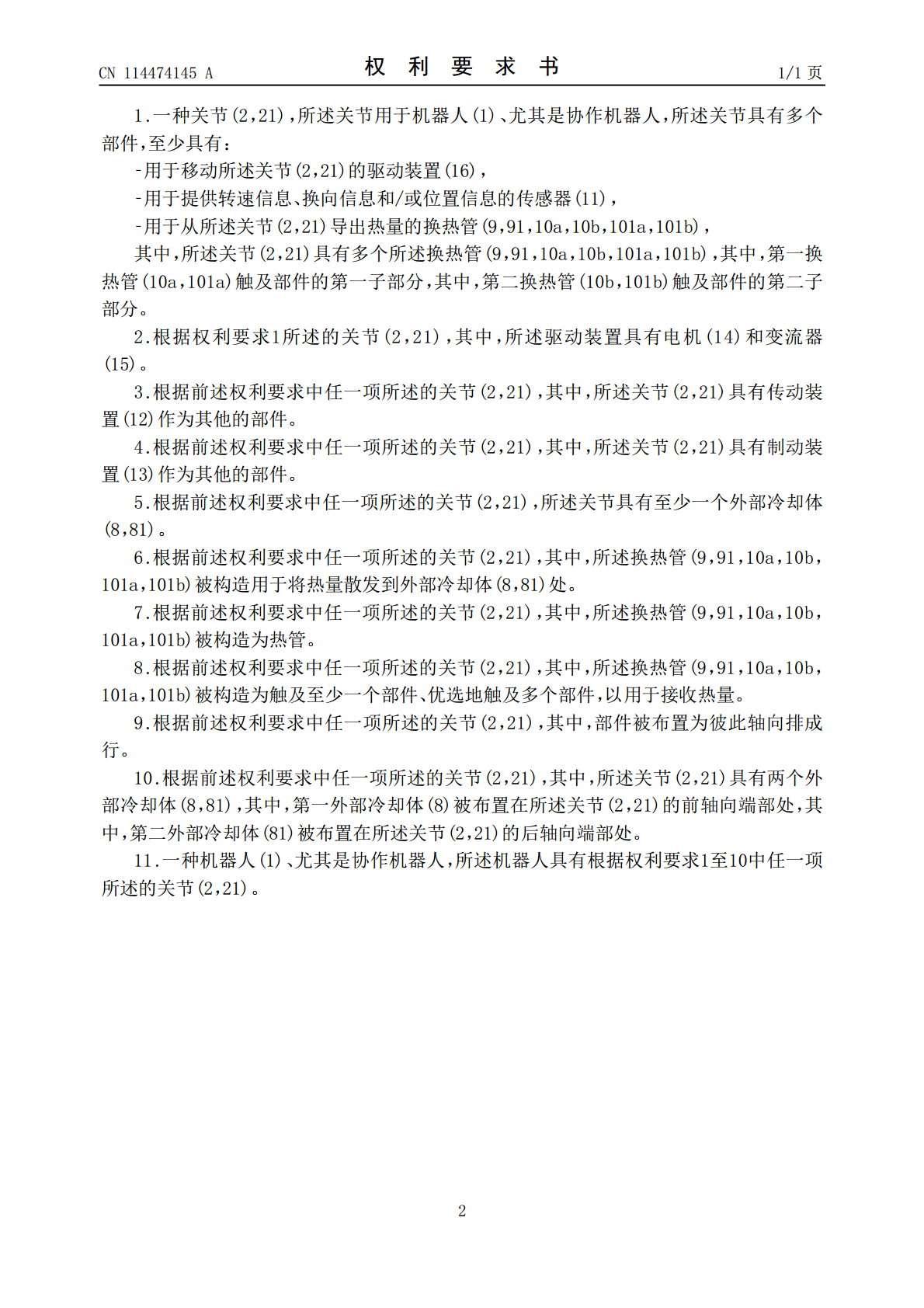
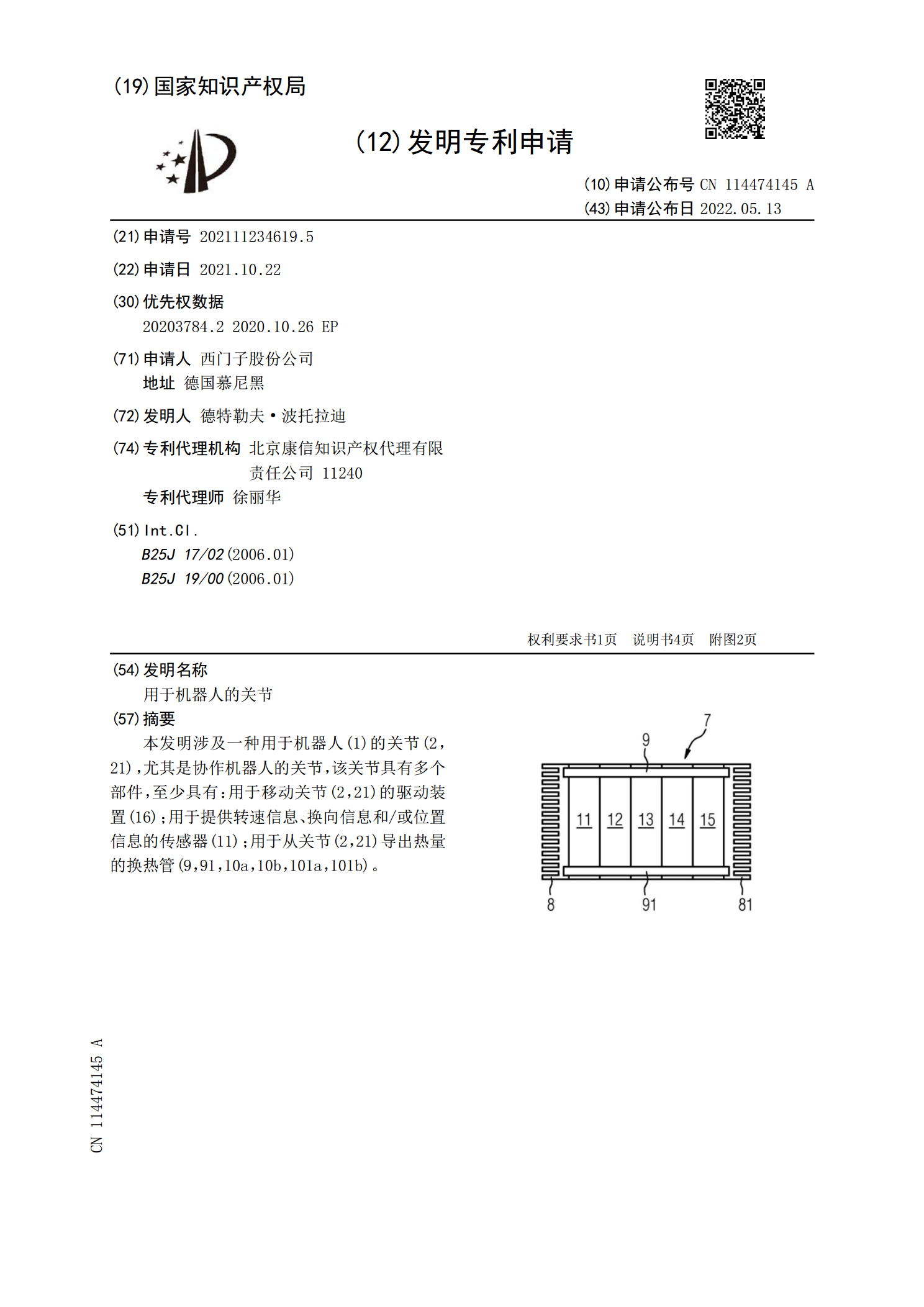
本发明涉及一种用于机器人(1)的关节(2,21),尤其是协作机器人的关节,该关节具有多个部件,至少具有:用于移动关节(2,21)的驱动装置(16);用于提供转速信息、换向信息和/或位置信息的传感器(11);用于从关节(2,21)导出热量的换热管(9,91,10a,10b,101a,101b)。
一种用于关节机器人的关节装置.pdf
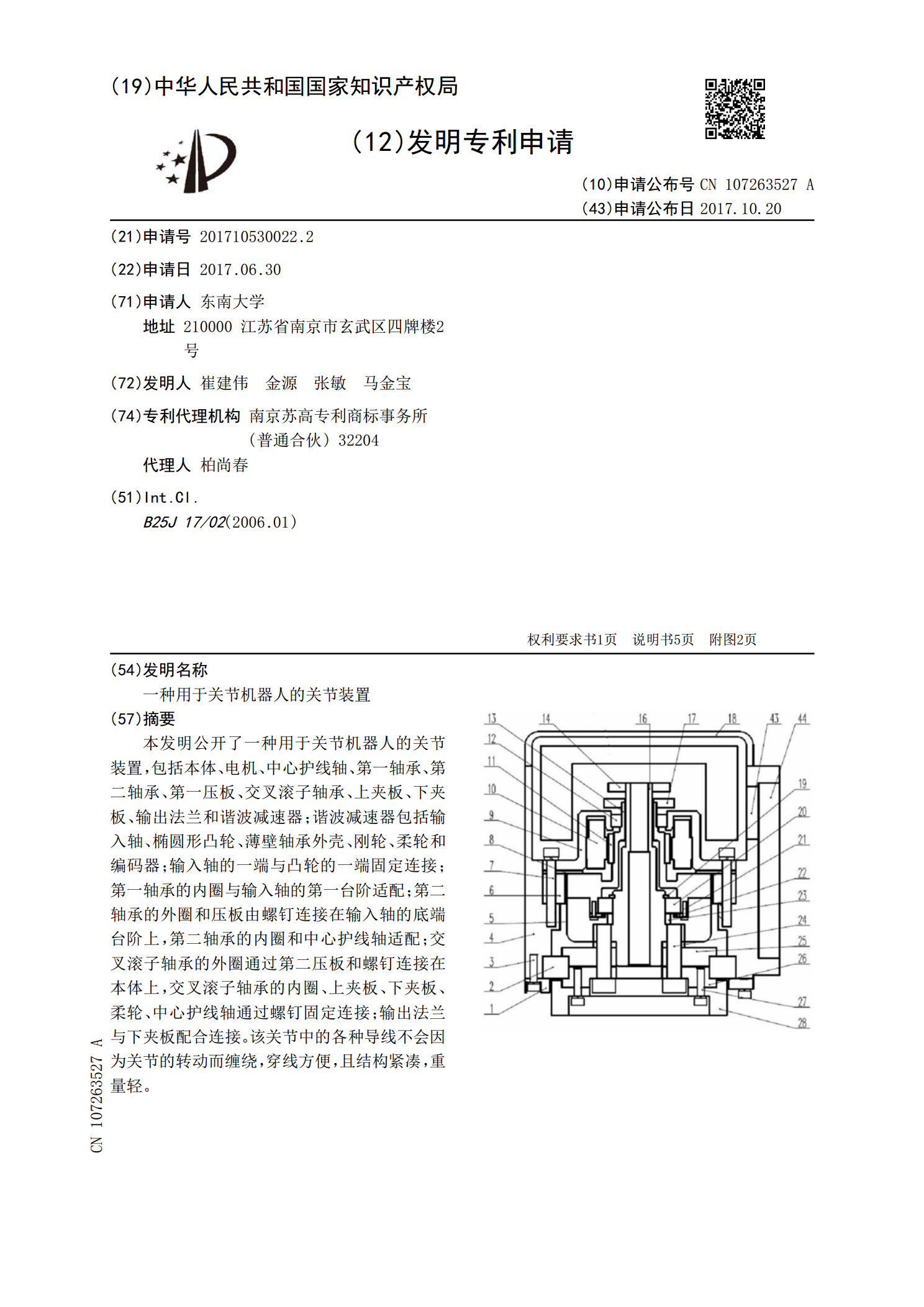
本发明公开了一种用于关节机器人的关节装置,包括本体、电机、中心护线轴、第一轴承、第二轴承、第一压板、交叉滚子轴承、上夹板、下夹板、输出法兰和谐波减速器;谐波减速器包括输入轴、椭圆形凸轮、薄壁轴承外壳、刚轮、柔轮和编码器;输入轴的一端与凸轮的一端固定连接;第一轴承的内圈与输入轴的第一台阶适配;第二轴承的外圈和压板由螺钉连接在输入轴的底端台阶上,第二轴承的内圈和中心护线轴适配;交叉滚子轴承的外圈通过第二压板和螺钉连接在本体上,交叉滚子轴承的内圈、上夹板、下夹板、柔轮、中心护线轴通过螺钉固定连接;输出法兰与下夹
用于机器人关节的齿轮组件.pdf
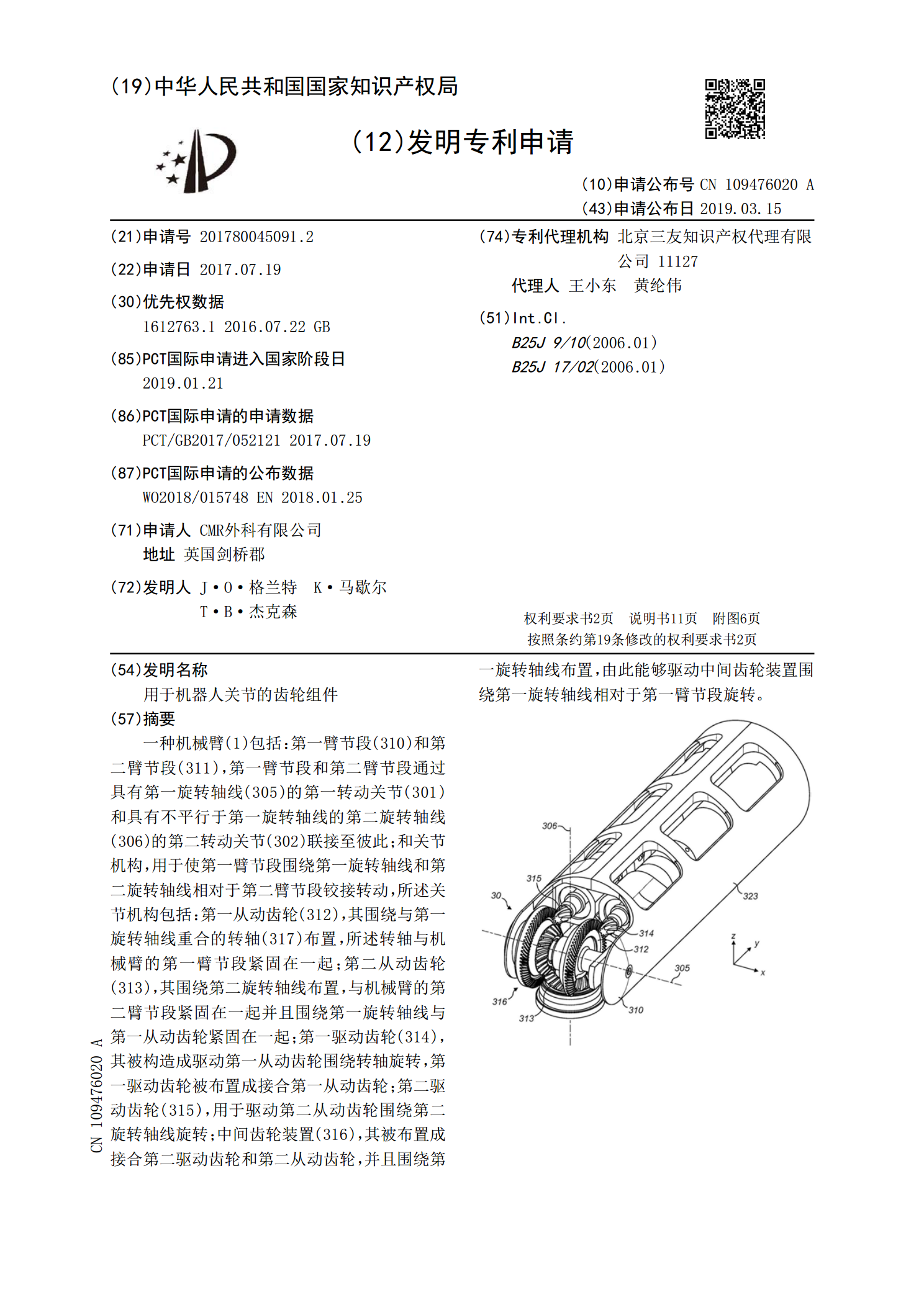
一种机械臂(1)包括:第一臂节段(310)和第二臂节段(311),第一臂节段和第二臂节段通过具有第一旋转轴线(305)的第一转动关节(301)和具有不平行于第一旋转轴线的第二旋转轴线(306)的第二转动关节(302)联接至彼此;和关节机构,用于使第一臂节段围绕第一旋转轴线和第二旋转轴线相对于第二臂节段铰接转动,所述关节机构包括:第一从动齿轮(312),其围绕与第一旋转轴线重合的转轴(317)布置,所述转轴与机械臂的第一臂节段紧固在一起;第二从动齿轮(313),其围绕第二旋转轴线布置,与机械臂的第二臂节段紧

用于机器人的关节、机械臂和机器人.pdf
公开了一种用于机器人的关节、机械臂和机器人。用于机器人的关节具有包括伺服电机、减速器和关节控制器的关节模组,所述关节还包括:力传感器,其设置在关节的输出端并测量输出端的受力状态以产生相应的数据信息;故障诊断模块,其与力传感器无线通信连接以从力传感器实时接收数据信息,故障诊断模块基于数据信息和用于驱动伺服电机的实时电学信号确定关节的运行状态。机械臂包括至少一个用于机器人的关节。机器人包括至少一个用于机器人的关节。在所述关节、机械臂和机器人中,可以实现关节的自我故障监测和诊断。

适用于机器人的关节模块.docx
适用于机器人的关节模块易格斯:适用于类人系统的预装配解决方案–来源于仿生学的灵感类人机器人正走在不断发展的道路上!您可从参加"RoboCup"足球赛的机器人运动员中看到它们正在如何迅速地发展着。来自科隆的耐磨塑料专家易格斯一直致力于迄今尚未解决的问题,并且成功研发出一种创新的“机器人模块”系统,适用于关节应用。迄今为止,开发商被迫将众多单件组合起来为用户定制出一些非常复杂的解决方案。在“robolink”模块系统中关节通过电缆的预紧力来控制,其运行方式就像是人类的筋骨一般。所有数据电缆都被安全地排列在带有