
一种精准定位式机器人升降装置及升降方法.pdf

一只****ua


1/8
2/8

3/8

4/8

5/8
6/8
7/8

8/8
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

一种精准定位式机器人升降装置及升降方法.pdf
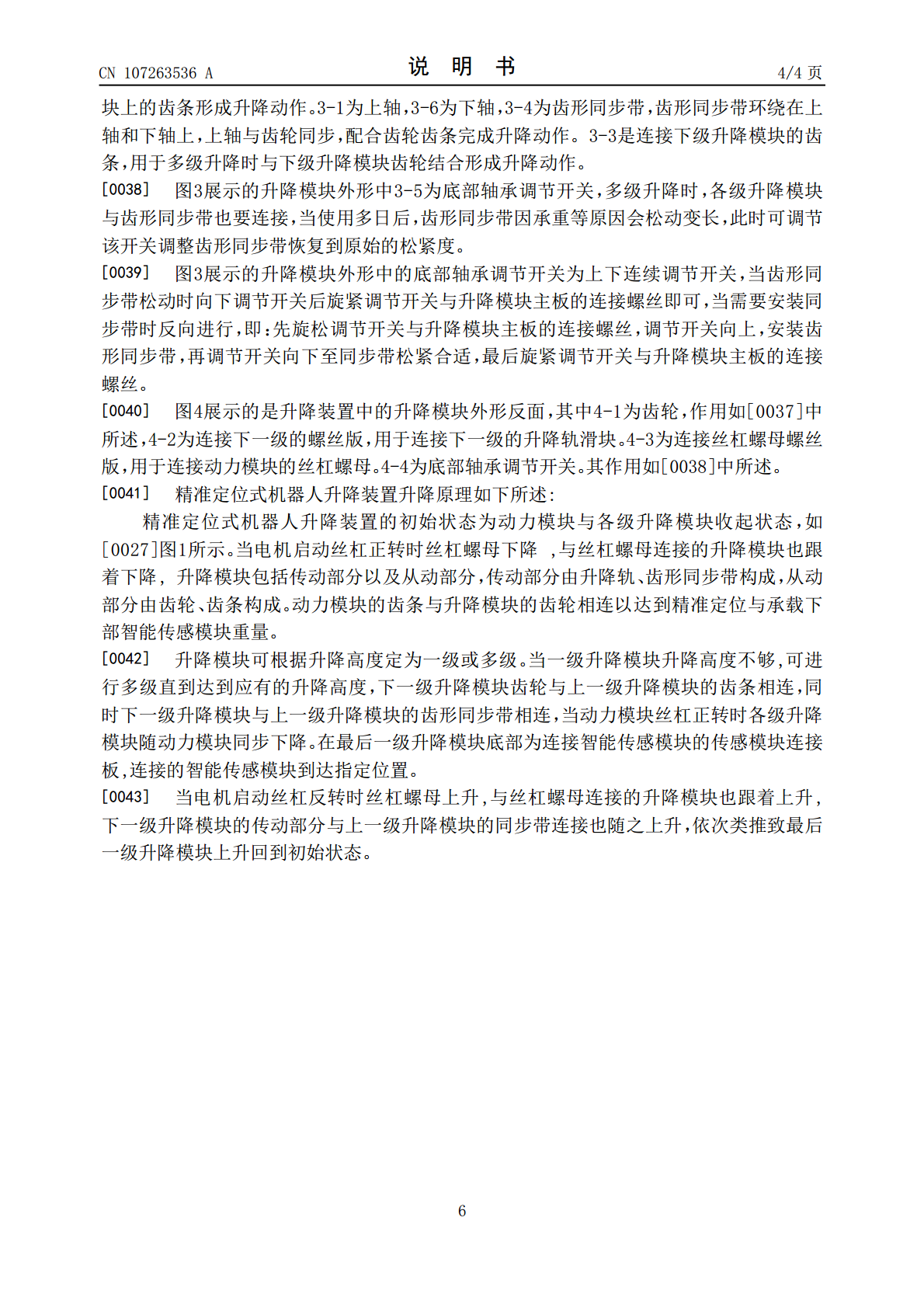
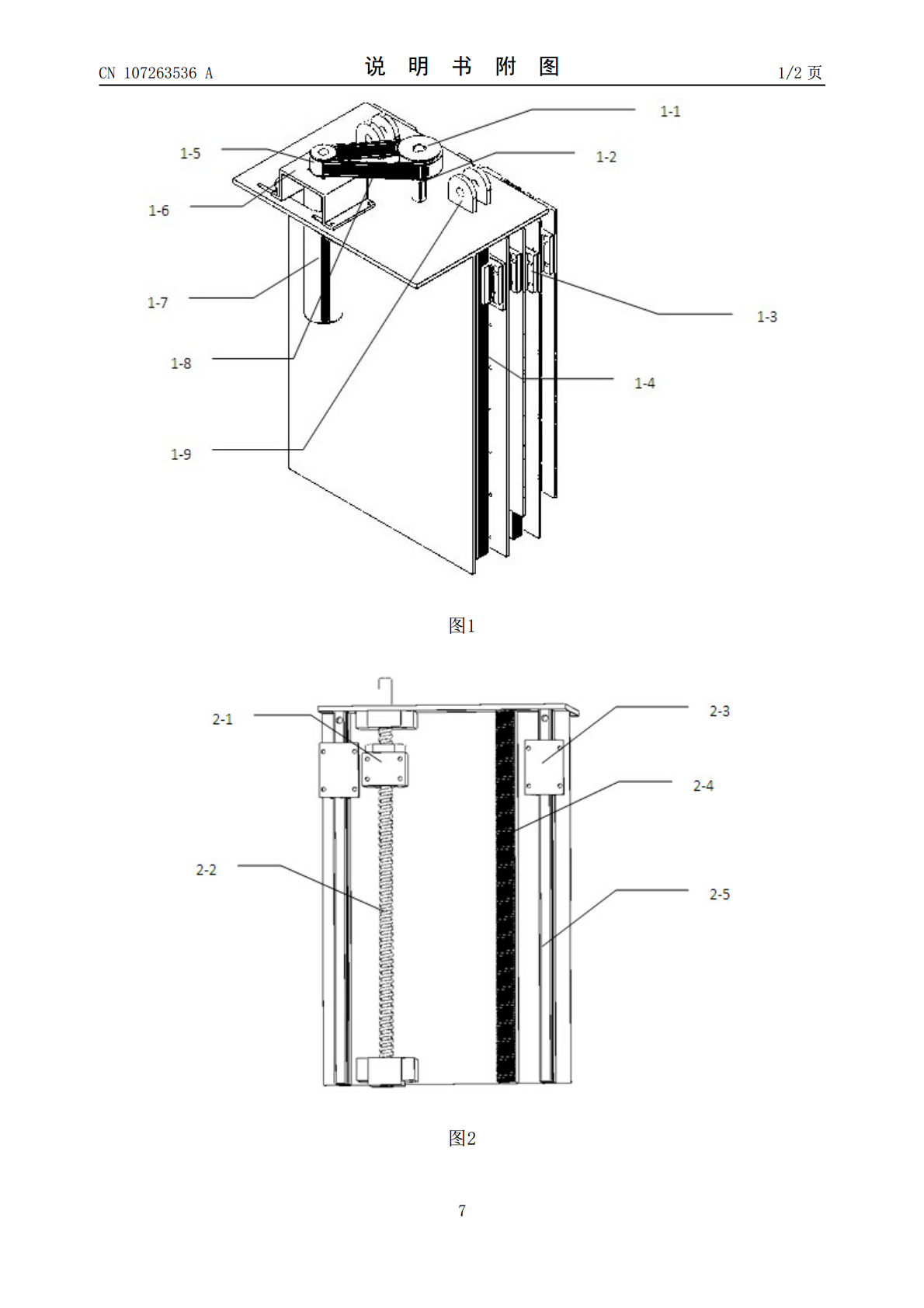
本发明提供一种精准定位式机器人升降装置,包括动力模块以及升降模块;所述的动力模块由丝杠、升降轨、齿条及固定升降模块的丝杠螺母、升降轨滑块组成。所述的动力模块顶部为顶部为升降驱动机构,当需要升降时,启动升降驱动电机带动丝杠转动,丝杠螺母带动升降模块上下移动,所述升降模块包括传动部分以及从动部分,所述传动部分由升降轨、齿形同步带构成,从动部分由齿轮、齿条构成。在升降模块的上端和下端分别安装有上轴和下轴。所述齿形同步带环绕在所述上轴和下轴上;丝杠螺母与第一级升降模块相连;下一级升降模块的传动部分与上一级升降模块

一种多级式机器人升降装置及升降方法.pdf
本发明提供一种多级式机器人升降装置,包括驱动模块以及若干级升降模块;各级升降模块包括传动机构以及卡销,所述传动机构包括导轨、传动带,所述导轨的上端和下端分别安装有顶滑轮和底滑轮,所述传动带环绕在所述顶滑轮和底滑轮上;所述卡销夹持所述传动带;各级升降模块中的第一级升降模块的传动机构与所述驱动模块连接,下一级升降模块的传动机构与上一级升降模块的传动带连接。本发明采用多级升降模块,各级升降模块采用传动带依次传动运行,各升降模块同时移动相同距离,有利于加快升降速度。

一种机器人升降装置及升降方法.pdf
本发明提供一种机器人升降装置,包括悬挂机构、机身滑臂系统、电机驱动机构、首拉绳和尾拉绳;机身滑臂系统包括若干级滑臂、第二导轨,第二导轨的下端安装有第二下滑轮,其上端安装在悬挂机构上;电机驱动机构安装在第二导轨或悬挂机构上;滑臂包括导轨、下滑轮、前导轨连接滑块和上滑轮,上滑轮、下滑轮分别安装在导轨的上端、下端,前导轨连接滑块安装在导轨上端的侧面;若干级滑臂中的下一级滑臂的前导轨连接滑块可滑动地安装在上一级滑臂的导轨上;若干级滑臂中的第一级滑臂的前导轨连接滑块可滑动地安装在第二导轨上。本发明利用滑轮工作原理,

一种用于升降式定位茶几的三联动升降定位装置.pdf
本发明涉及一种用于升降式定位茶几的三联动升降定位装置,包括固定圆盘;固定圆盘下端设置有三对连接柱;三对连接柱下端焊接有Y型固定片;Y型固定片中部连接有中心轴;中心轴与固定圆盘之间通过轴承相连接,且中心轴上通过键安装有中心齿轮;Y型固定片上端中部安装有一号球轴承;一号球轴承上安装有驱动轴;驱动轴顶端与固定圆盘之间通过轴承相连接,且驱动轴中部通过键安装有驱动齿轮;Y型固定片均匀设置有三个定位机构;三个定位机构的顶端分别与移动圆盘相连接;移动圆盘中部与中心轴之间通过间隙配合方式相连接。本发明能实现高精度的升降定

一种升降式定位销装置.pdf
本发明公开了一种升降式定位销装置,其包括导向主体、设于导向主体内的定位销主体、具有输出转轴的驱动机构,所述驱动机构通过摆杆与定位销主体连接,所述摆杆的一端周向相对固定地套接于驱动机构的输出转轴上,所述摆杆的另一端设有长条形滑槽;所述定位销主体上插装有连接杆,所述连接杆的一端嵌入并限位于所述摆杆的滑槽内;所述导向主体设有供所述连接杆穿过的长条形的通槽。本发明通过设计摆杆连接驱动机构和定位销主体及具有导向功能的导向主体,能够有效保证使用过程中定位销主体的升降运动的稳定性;避免使用复位弹簧、齿轮等易损耗精细构件