
一种车辆搬运器的车轮定位方法及系统.pdf

雨巷****怡轩


1/10

2/10

3/10

4/10

5/10

6/10

7/10

8/10

9/10

10/10
亲,该文档总共16页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

一种车辆搬运器的车轮定位方法及系统.pdf
本公开涉及一种车辆搬运器的车轮定位方法及系统,该方法包括:获取第一车轮夹持体的第一位置信息及第二位置信息;根据所述第一位置信息及第二位置信息确定第二车轮夹持体的第一目标位置;获取第一车轮夹持体的第三位置信息;根据所述第一位置信息、第二位置信息及第三位置信息确定第一车轮夹持体的第二目标位置;通过所述方法能够快速准确地确定第一车轮夹持体及第二车轮夹持体的目标位置。
车辆搬运器、车辆搬运系统以及车辆搬运方法.pdf
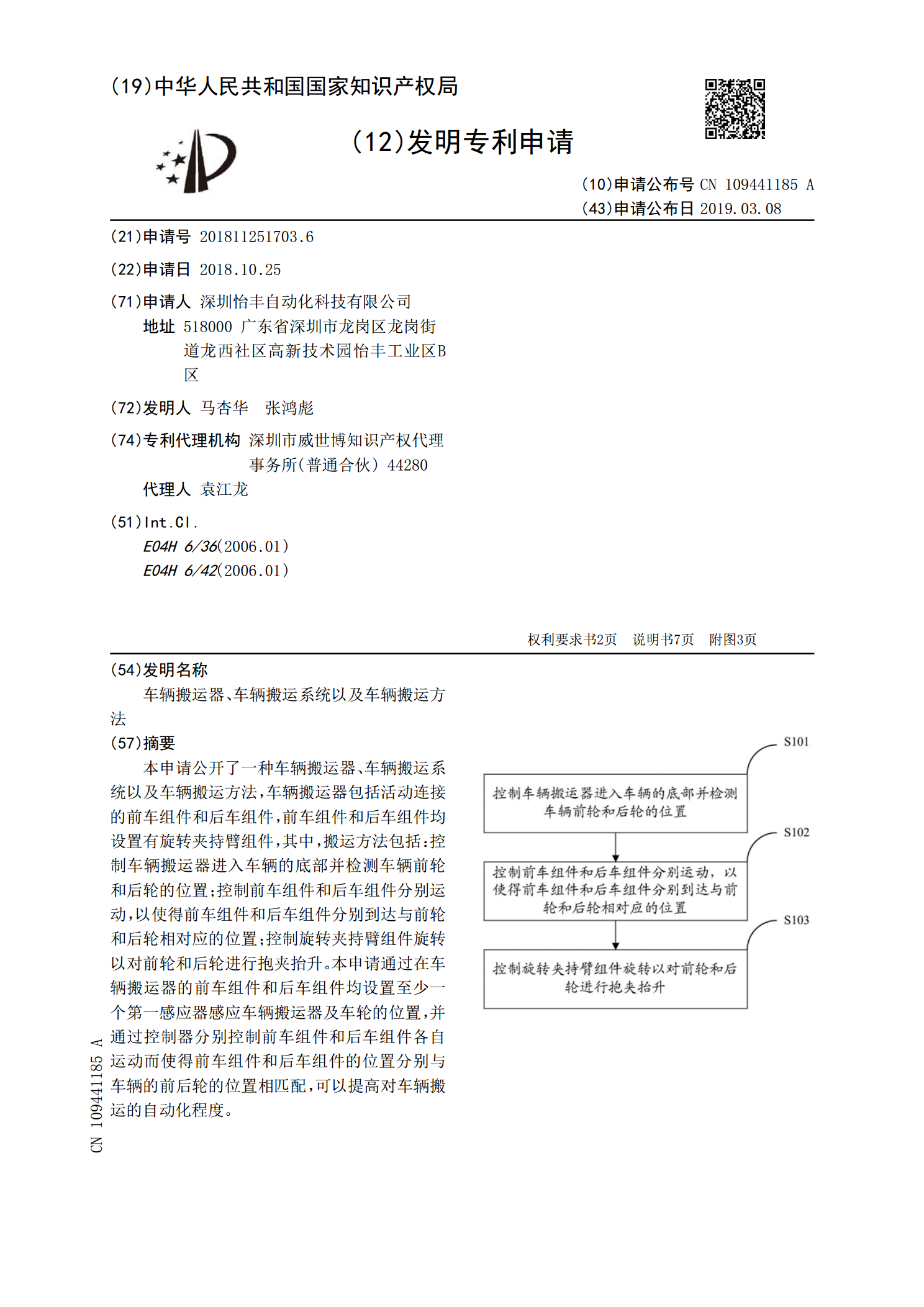
本申请公开了一种车辆搬运器、车辆搬运系统以及车辆搬运方法,车辆搬运器包括活动连接的前车组件和后车组件,前车组件和后车组件均设置有旋转夹持臂组件,其中,搬运方法包括:控制车辆搬运器进入车辆的底部并检测车辆前轮和后轮的位置;控制前车组件和后车组件分别运动,以使得前车组件和后车组件分别到达与前轮和后轮相对应的位置;控制旋转夹持臂组件旋转以对前轮和后轮进行抱夹抬升。本申请通过在车辆搬运器的前车组件和后车组件均设置至少一个第一感应器感应车辆搬运器及车轮的位置,并通过控制器分别控制前车组件和后车组件各自运动而使得前车
用于车辆的车轮定位的方法和系统.pdf
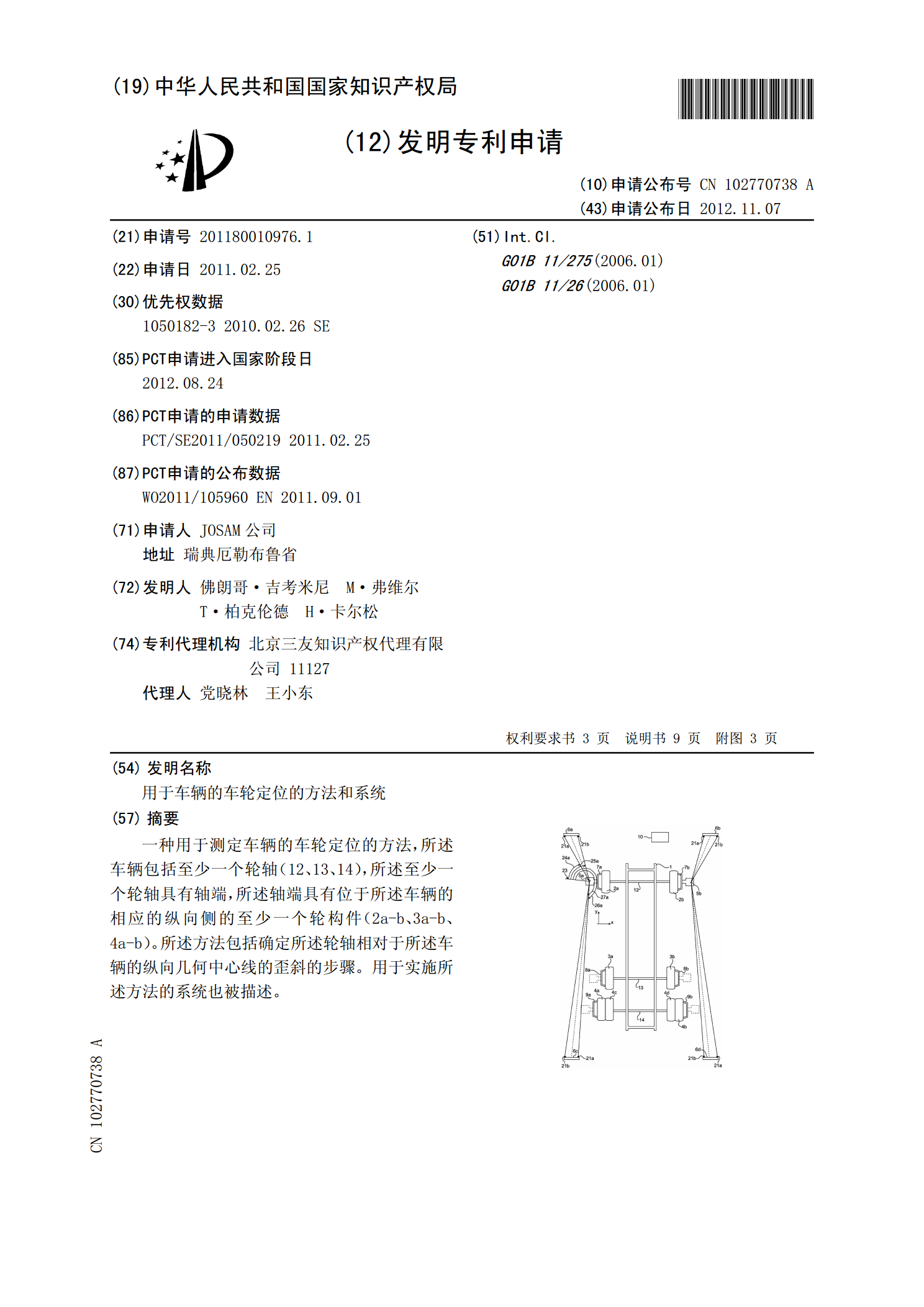
一种用于测定车辆的车轮定位的方法,所述车辆包括至少一个轮轴(12、13、14),所述至少一个轮轴具有轴端,所述轴端具有位于所述车辆的相应的纵向侧的至少一个轮构件(2a-b、3a-b、4a-b)。所述方法包括确定所述轮轴相对于所述车辆的纵向几何中心线的歪斜的步骤。用于实施所述方法的系统也被描述。
车辆搬运器及应用其的车辆搬运系统.pdf
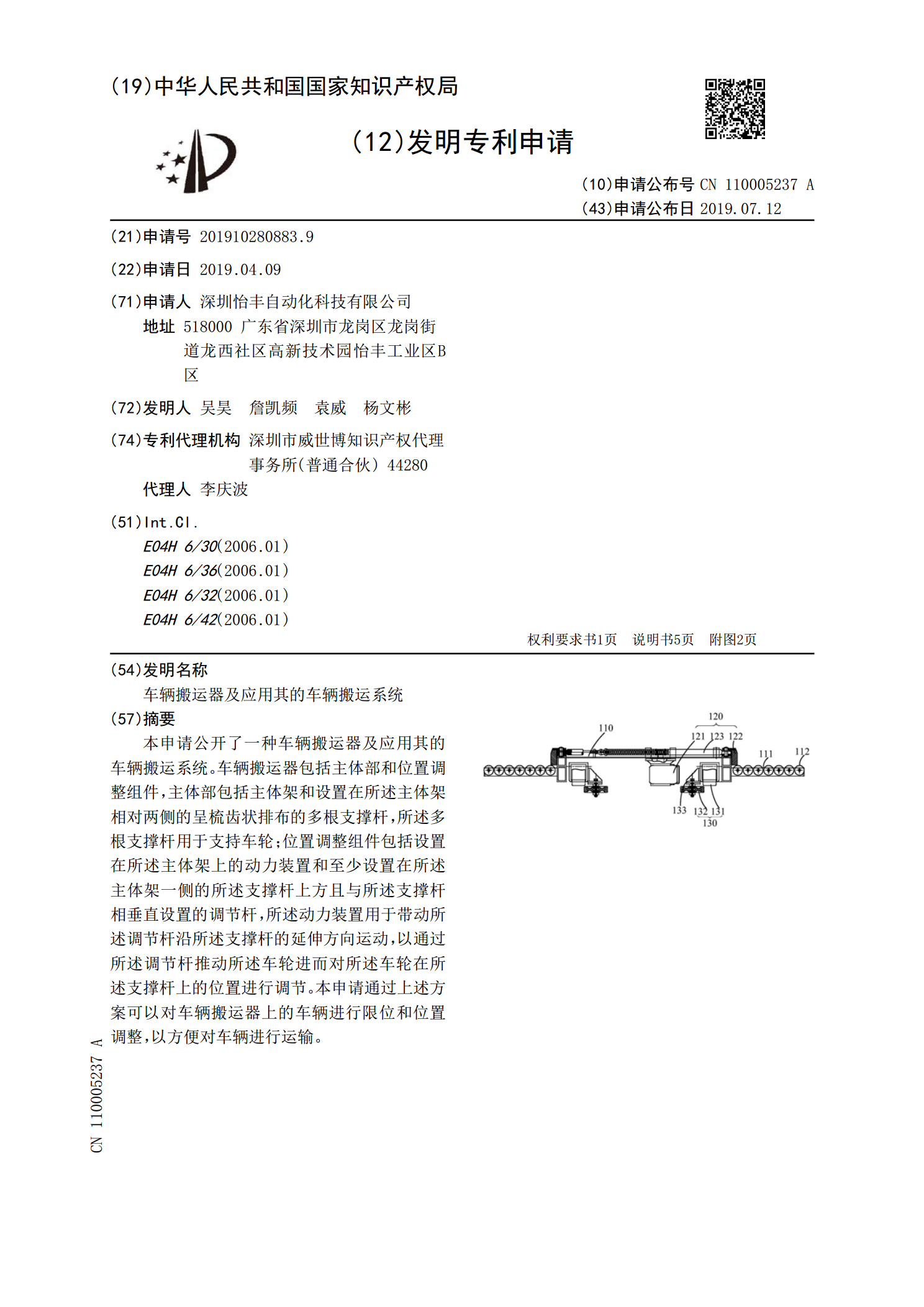
本申请公开了一种车辆搬运器及应用其的车辆搬运系统。车辆搬运器包括主体部和位置调整组件,主体部包括主体架和设置在所述主体架相对两侧的呈梳齿状排布的多根支撑杆,所述多根支撑杆用于支持车轮;位置调整组件包括设置在所述主体架上的动力装置和至少设置在所述主体架一侧的所述支撑杆上方且与所述支撑杆相垂直设置的调节杆,所述动力装置用于带动所述调节杆沿所述支撑杆的延伸方向运动,以通过所述调节杆推动所述车轮进而对所述车轮在所述支撑杆上的位置进行调节。本申请通过上述方案可以对车辆搬运器上的车辆进行限位和位置调整,以方便对车辆进
一种搬运小车、车辆搬运器及其充电系统.pdf
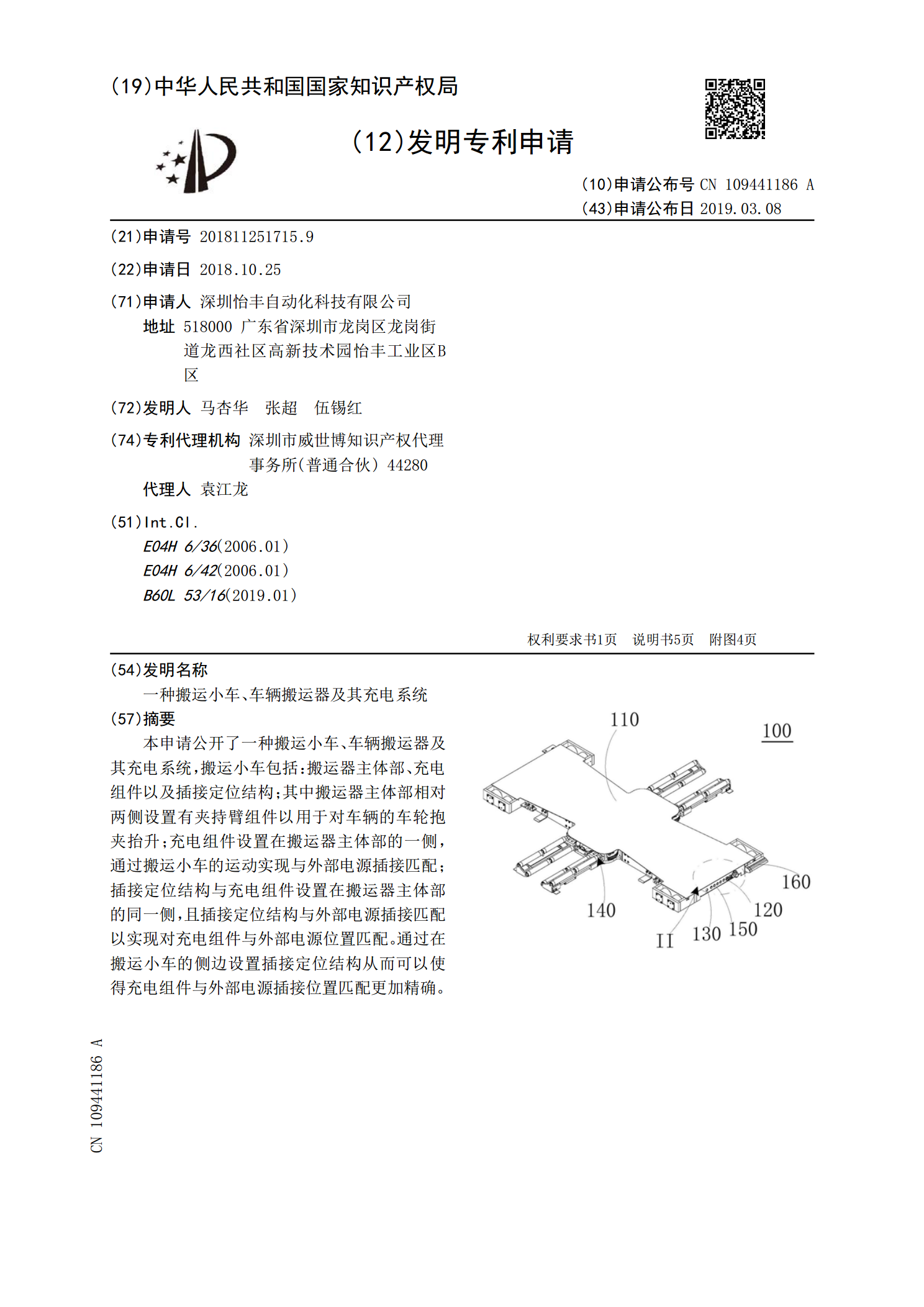
本申请公开了一种搬运小车、车辆搬运器及其充电系统,搬运小车包括:搬运器主体部、充电组件以及插接定位结构;其中搬运器主体部相对两侧设置有夹持臂组件以用于对车辆的车轮抱夹抬升;充电组件设置在搬运器主体部的一侧,通过搬运小车的运动实现与外部电源插接匹配;插接定位结构与充电组件设置在搬运器主体部的同一侧,且插接定位结构与外部电源插接匹配以实现对充电组件与外部电源位置匹配。通过在搬运小车的侧边设置插接定位结构从而可以使得充电组件与外部电源插接位置匹配更加精确。