
一种数控调节升降的船体分段定位胎架方阵.pdf

一只****爱敏


1/10

2/10

3/10

4/10

5/10

6/10

7/10

8/10

9/10

10/10
亲,该文档总共12页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

一种数控调节升降的船体分段定位胎架方阵.pdf
本发明公开了一种数控调节升降的船体分段定位胎架方阵,其采用电机驱使蜗杆转动,蜗杆带动涡轮转动,蜗轮带动顶升丝杠转动,顶升丝杠驱使顶升导轨上下移动,实现对大型船体结构分段的精确顶升定位,本发明采用数控的顶升装置,替代通过拼装焊接实现定位的传统钢结构胎架。本发明胎架采用模块化设计和制造,可高精度地快速调整胎架方阵的高度定位尺寸,尤其适用于较大型船体和海洋平台分段的复杂曲面,可提高生产效率,缩短造船周期。
一种智能胎架及智能胎架支撑船体的方法.pdf
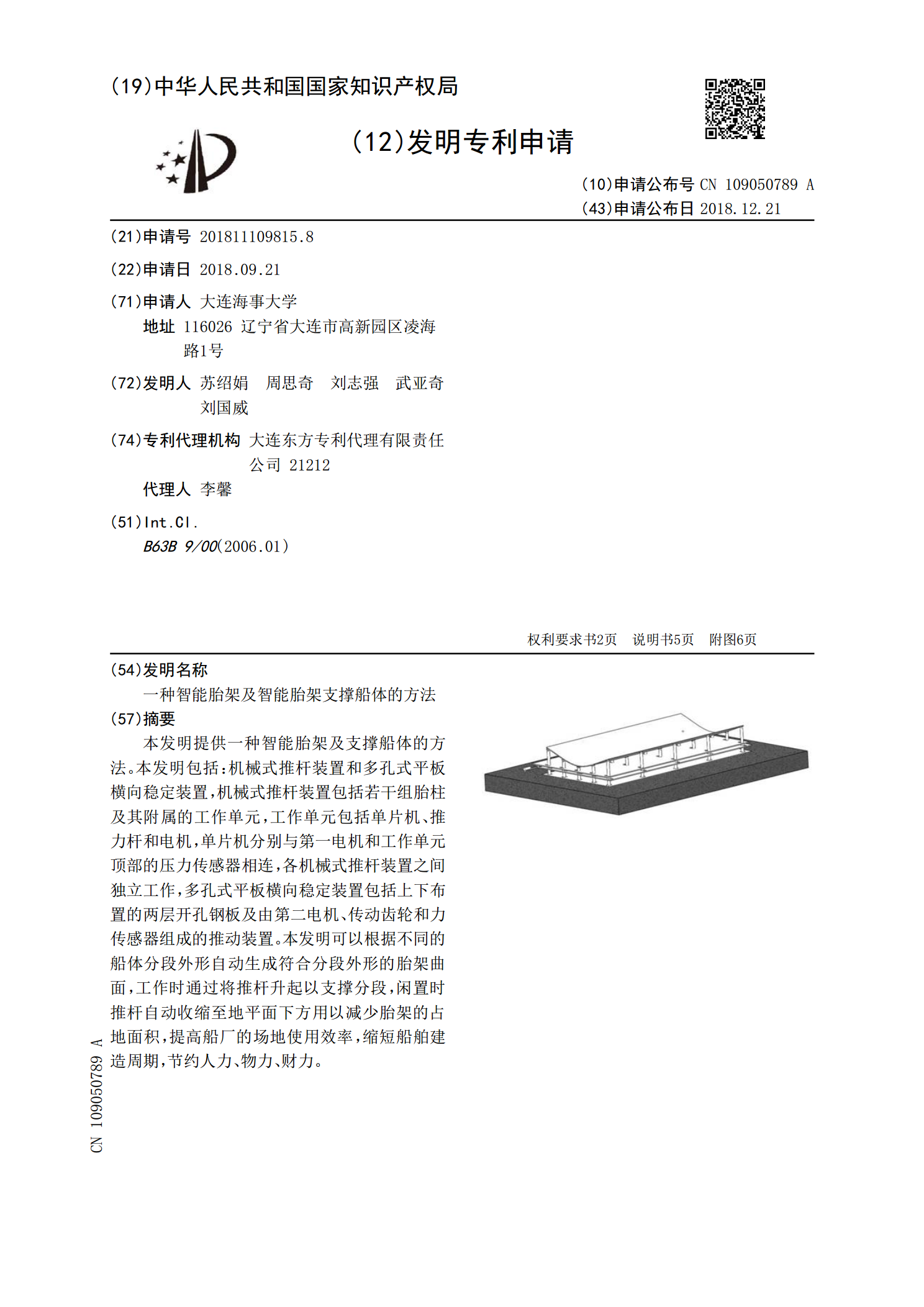
本发明提供一种智能胎架及支撑船体的方法。本发明包括:机械式推杆装置和多孔式平板横向稳定装置,机械式推杆装置包括若干组胎柱及其附属的工作单元,工作单元包括单片机、推力杆和电机,单片机分别与第一电机和工作单元顶部的压力传感器相连,各机械式推杆装置之间独立工作,多孔式平板横向稳定装置包括上下布置的两层开孔钢板及由第二电机、传动齿轮和力传感器组成的推动装置。本发明可以根据不同的船体分段外形自动生成符合分段外形的胎架曲面,工作时通过将推杆升起以支撑分段,闲置时推杆自动收缩至地平面下方用以减少胎架的占地面积,提高船厂

一种船体支撑装置及胎架.pdf
本发明公开了一种船体支撑装置及胎架,包括伸缩杆,所述伸缩杆的顶端安装有第一连接板,所述第一连接板通过铰链配合有第二连接板,所述第二连接板远离第一连接板的一端安装有支撑板,所述铰链用于调整支撑板与待支撑船体的夹角使支撑板与待支撑船体为面接触,所述伸缩杆用于通过支撑板对船体进行支撑,相较于传统的点、线接触对船体实现支撑,能够使支撑板对船体施加的支撑力更为均匀,集中点压强降低,避免船体分段的外表面板件受到挤压而变形的问题,从而避免了船体分段外表面的油漆损坏。
一种分段制造胎架.pdf
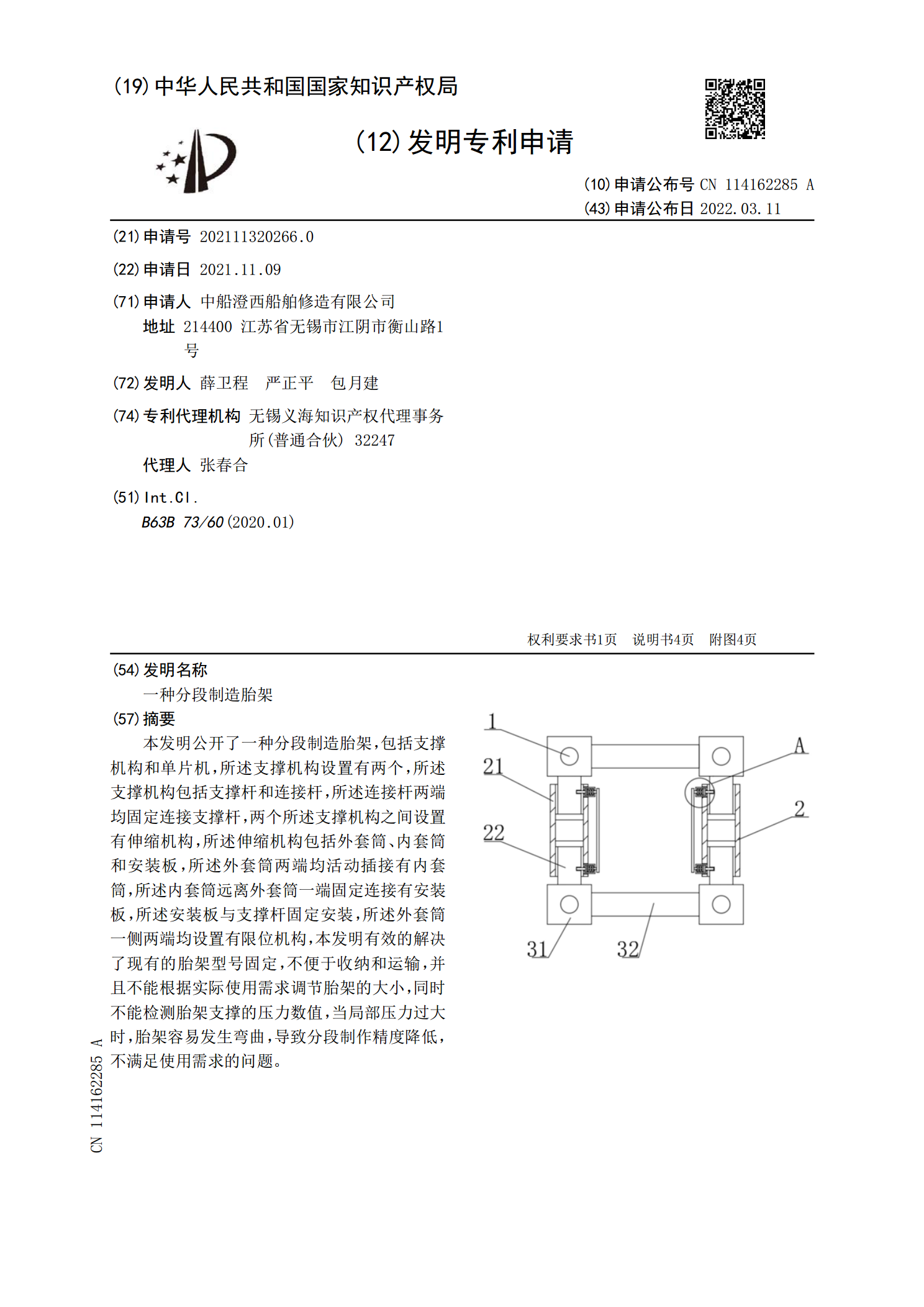
本发明公开了一种分段制造胎架,包括支撑机构和单片机,所述支撑机构设置有两个,所述支撑机构包括支撑杆和连接杆,所述连接杆两端均固定连接支撑杆,两个所述支撑机构之间设置有伸缩机构,所述伸缩机构包括外套筒、内套筒和安装板,所述外套筒两端均活动插接有内套筒,所述内套筒远离外套筒一端固定连接有安装板,所述安装板与支撑杆固定安装,所述外套筒一侧两端均设置有限位机构,本发明有效的解决了现有的胎架型号固定,不便于收纳和运输,并且不能根据实际使用需求调节胎架的大小,同时不能检测胎架支撑的压力数值,当局部压力过大时,胎架容易
船体分段搭载定位装置.pdf
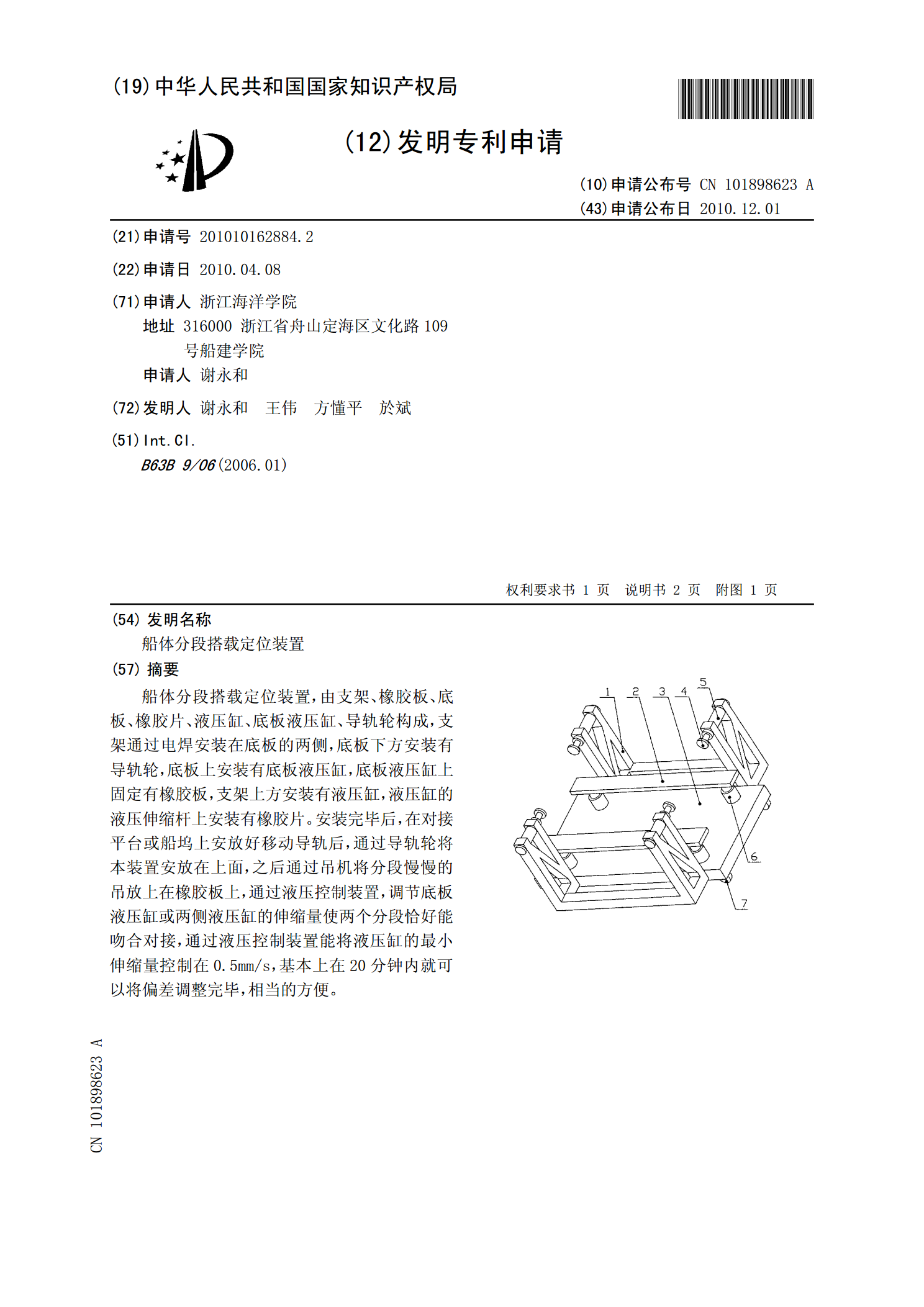
船体分段搭载定位装置,由支架、橡胶板、底板、橡胶片、液压缸、底板液压缸、导轨轮构成,支架通过电焊安装在底板的两侧,底板下方安装有导轨轮,底板上安装有底板液压缸,底板液压缸上固定有橡胶板,支架上方安装有液压缸,液压缸的液压伸缩杆上安装有橡胶片。安装完毕后,在对接平台或船坞上安放好移动导轨后,通过导轨轮将本装置安放在上面,之后通过吊机将分段慢慢的吊放上在橡胶板上,通过液压控制装置,调节底板液压缸或两侧液压缸的伸缩量使两个分段恰好能吻合对接,通过液压控制装置能将液压缸的最小伸缩量控制在0.5mm/s,基本上在2