
自主行走型清扫机.pdf

鹏飞****可爱


1/10

2/10

3/10

4/10

5/10

6/10

7/10

8/10

9/10

10/10
亲,该文档总共18页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

自主行走型清扫机.pdf
本发明提供提高了清扫效率的自主行走型清扫机。本发明的自主行走型清扫机包括设置于主体的底面侧的、能够以不同的速度旋转的左驱动轮和右驱动轮以及控制各驱动轮的角速度的控制部,该控制部进行如下控制的任意项:(1)逆时针或顺时针转弯时的右驱动轮或左驱动轮的角速度大于直线前进时。(2)逆时针或顺时针原地转弯时的右驱动轮或左驱动轮各自的角速度大于直线前进时。

自主行走型清扫机和扫除系统.pdf
本发明提供一种自主行走型清扫机和扫除系统。自主行走型清扫机(100)具备:主体部(10),其具有壳体(11)、安装于该壳体(11)的驱动轮(车轮(20))以及用于驱动该驱动轮的驱动部(25);地图保存部(80),其保存用于主体部(10)行走的地图信息;判定部(110),其判定主体部(10)是否接近或接触了感染病毒和细菌中的至少一方的感染者;以及地图信息修正部(150),其将接触信息反映到地图保存部(80)中保存的地图信息中,所述接触信息是与判定部(110)判定出的与主体部(10)接近或接触了感染者这一情况
自主行走型清扫机和扫除系统.pdf
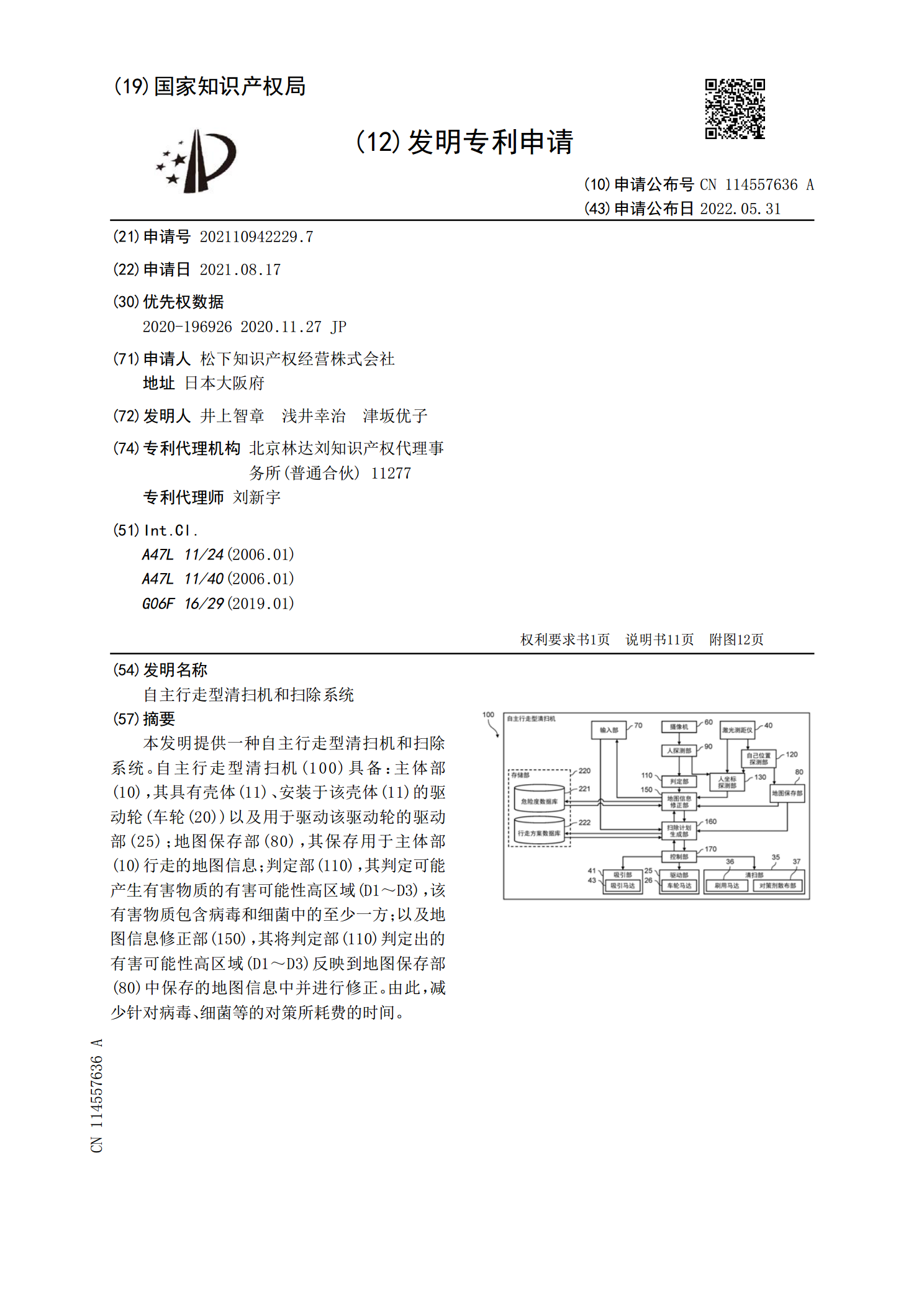
本发明提供一种自主行走型清扫机和扫除系统。自主行走型清扫机(100)具备:主体部(10),其具有壳体(11)、安装于该壳体(11)的驱动轮(车轮(20))以及用于驱动该驱动轮的驱动部(25);地图保存部(80),其保存用于主体部(10)行走的地图信息;判定部(110),其判定可能产生有害物质的有害可能性高区域(D1~D3),该有害物质包含病毒和细菌中的至少一方;以及地图信息修正部(150),其将判定部(110)判定出的有害可能性高区域(D1~D3)反映到地图保存部(80)中保存的地图信息中并进行修正。由此

自主行走型吸尘器.pdf
本发明的自主行走型吸尘器(S)具有形成主体部(1H)的外廓的壳体(1),由各行进电动机(2m、3m)的驱动分别旋转的一对驱动轮(2、3),沿驱动轮(2、3)的车轴方向延伸、在主体部(1H)与驱动轮(2、3)间可转动地被支承并支承驱动轮(2、3)的臂部件(24、34),将臂部件(24、34)可旋转地支承于主体部(1H)的第一轴(25a、35a),将臂部件(24、34)相对于驱动轮(2、3)可旋转地支承的第二轴(25b、35b),由臂部件(24、34)的转动,驱动轮(2、3)在上下方向移动,无关臂部件(24、
自主行走型电动吸尘器.pdf
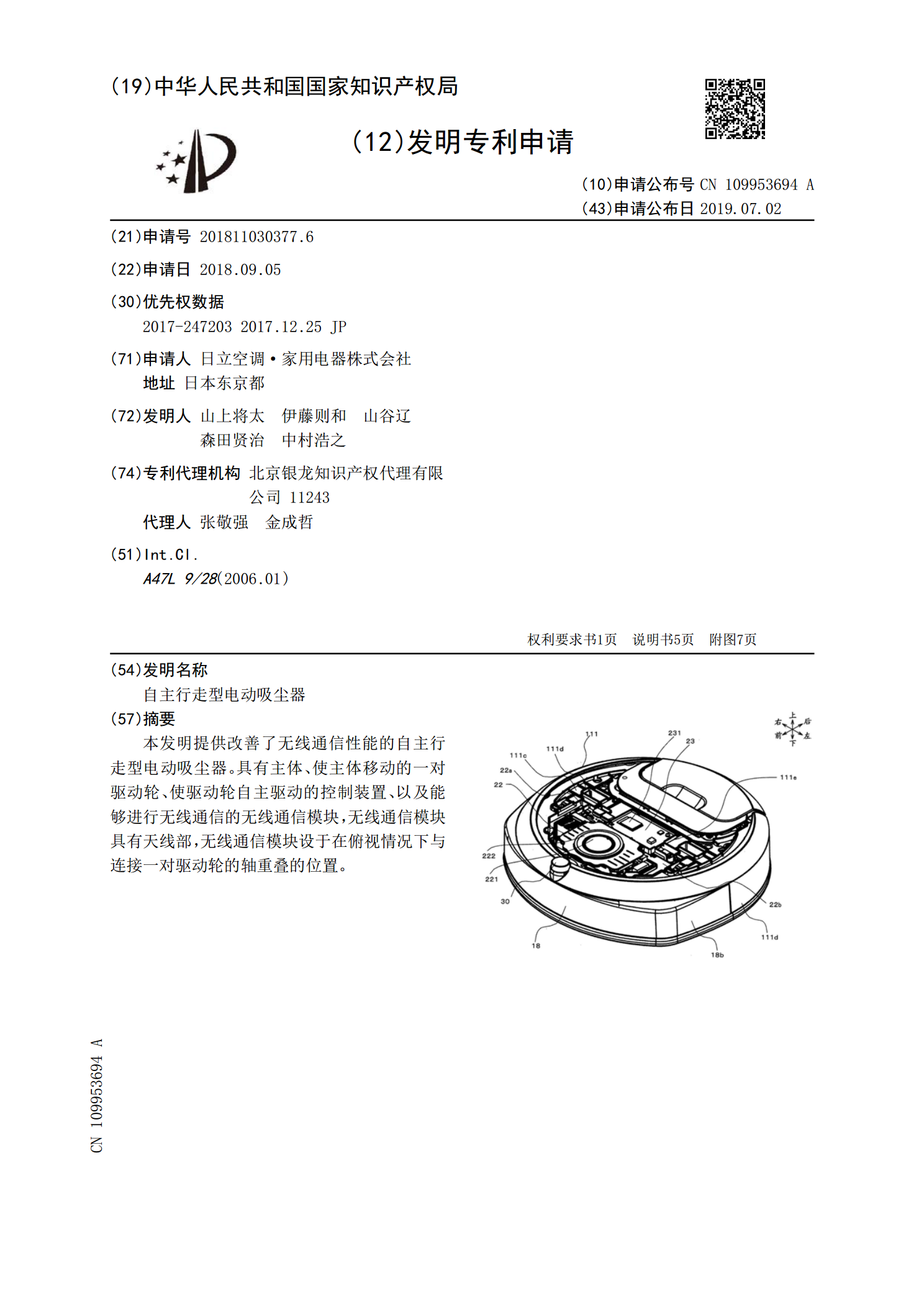
本发明提供改善了无线通信性能的自主行走型电动吸尘器。具有主体、使主体移动的一对驱动轮、使驱动轮自主驱动的控制装置、以及能够进行无线通信的无线通信模块,无线通信模块具有天线部,无线通信模块设于在俯视情况下与连接一对驱动轮的轴重叠的位置。