
一种低速移动抓取搬运机器人手臂的承载爪.pdf

一条****涛k

1/6
2/6

3/6
4/6

5/6
6/6
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料
一种低速移动抓取搬运机器人手臂的承载爪.pdf
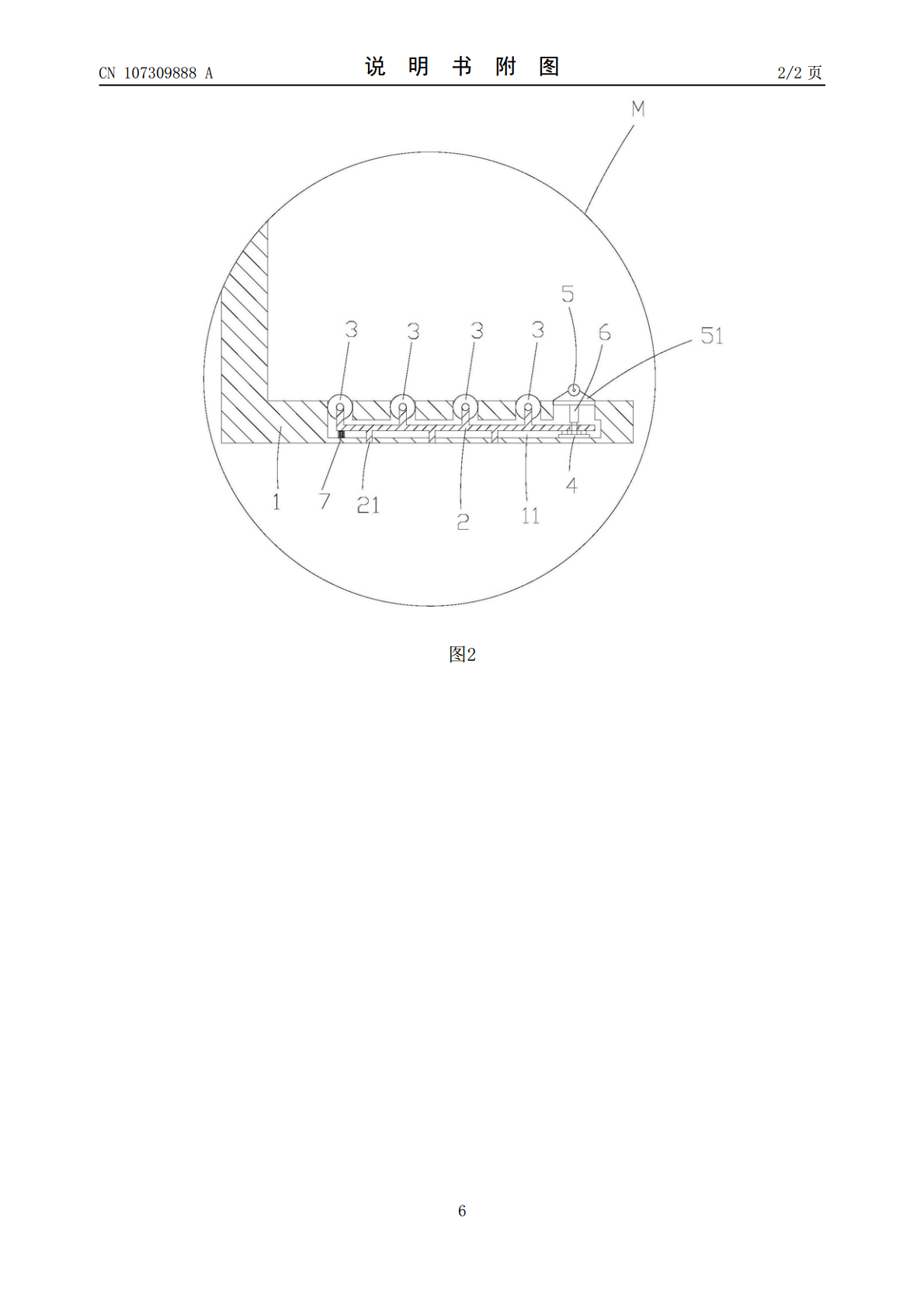
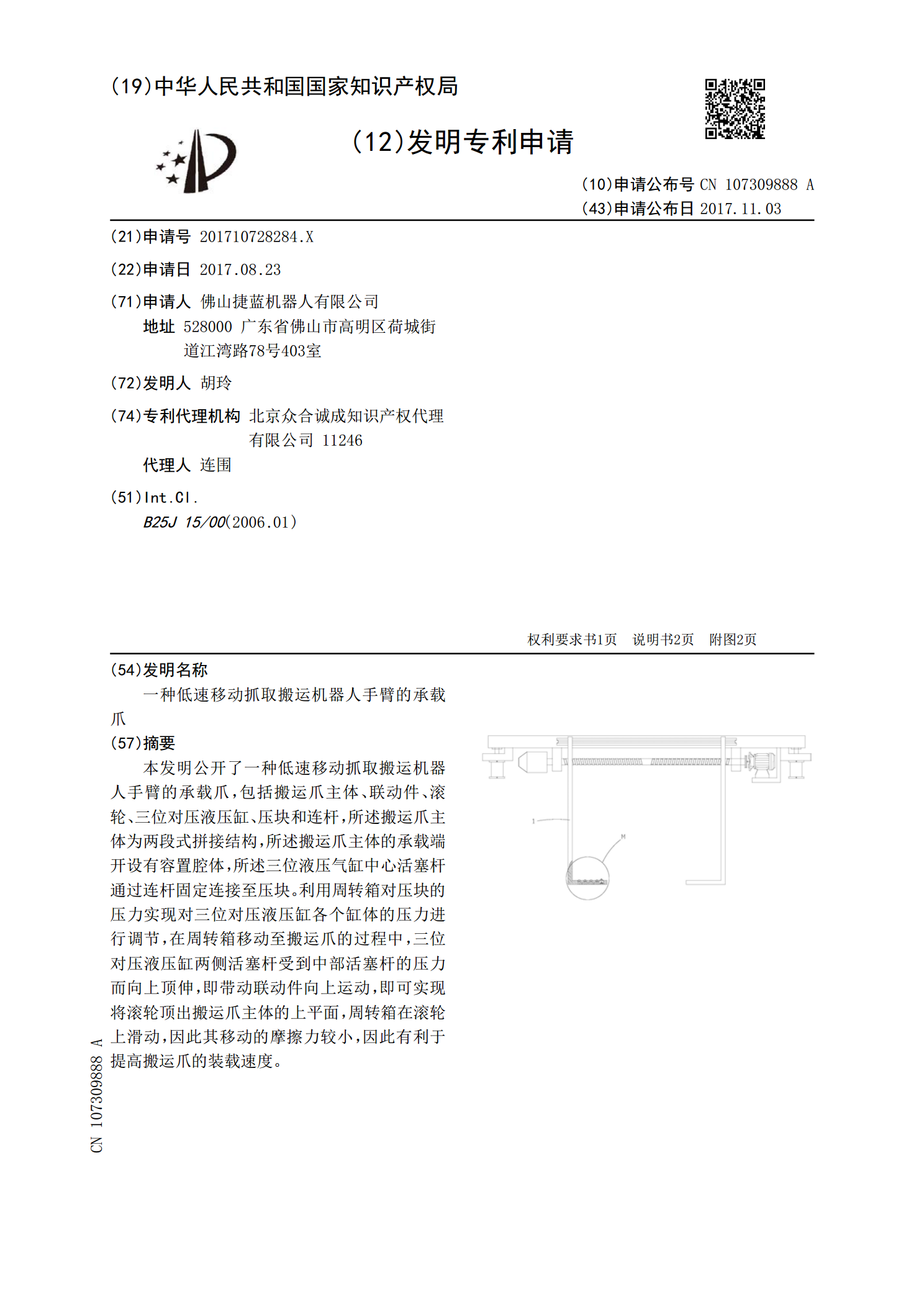
本发明公开了一种低速移动抓取搬运机器人手臂的承载爪,包括搬运爪主体、联动件、滚轮、三位对压液压缸、压块和连杆,所述搬运爪主体为两段式拼接结构,所述搬运爪主体的承载端开设有容置腔体,所述三位液压气缸中心活塞杆通过连杆固定连接至压块。利用周转箱对压块的压力实现对三位对压液压缸各个缸体的压力进行调节,在周转箱移动至搬运爪的过程中,三位对压液压缸两侧活塞杆受到中部活塞杆的压力而向上顶伸,即带动联动件向上运动,即可实现将滚轮顶出搬运爪主体的上平面,周转箱在滚轮上滑动,因此其移动的摩擦力较小,因此有利于提高搬运爪的装

一种双旋转双爪抓取机械手臂.pdf
本发明公开了一种双旋转双爪抓取机械手臂,包括手臂支杆、工件托盘及设置在手臂支杆下方的控制台,所述控制台下方设置转盘。所述转盘下方设置并列的第一机械手指和第二机械手指,所述转盘下方设置第一转枝和第二转枝,所述第一转枝的末端设置第一机械手指,所述第二转枝的末端设置第二机械手指,所述第一机械手指和第二机械手指的手指夹持面设置为内凹形,所述第一转枝和第二转枝独立旋转,第一转枝/第二转枝中至少一个能缩进8cm。本发明第一转枝和第二转枝中有一个能独立缩进,一次抓取两个待加工的工件,间隔取件,每个机械手指能独立旋转,方
一种机器人手臂抓取控制方法及系统.pdf
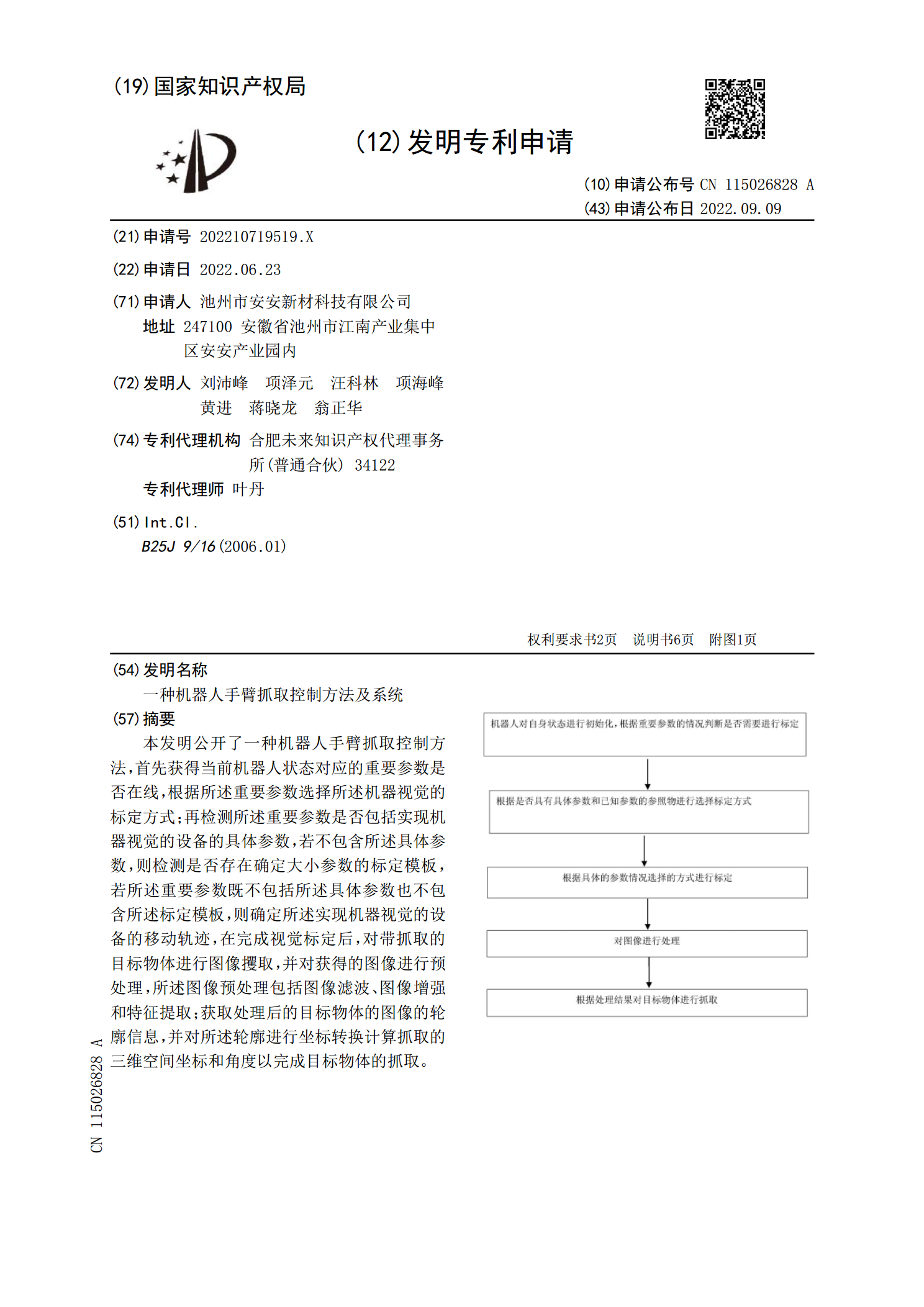
本发明公开了一种机器人手臂抓取控制方法,首先获得当前机器人状态对应的重要参数是否在线,根据所述重要参数选择所述机器视觉的标定方式;再检测所述重要参数是否包括实现机器视觉的设备的具体参数,若不包含所述具体参数,则检测是否存在确定大小参数的标定模板,若所述重要参数既不包括所述具体参数也不包含所述标定模板,则确定所述实现机器视觉的设备的移动轨迹,在完成视觉标定后,对带抓取的目标物体进行图像攫取,并对获得的图像进行预处理,所述图像预处理包括图像滤波、图像增强和特征提取;获取处理后的目标物体的图像的轮廓信息,并对所

一种搬运机器人用抓取装置.pdf
本发明公开了一种搬运机器人用抓取装置,包括机体和传送机构,所述机体连接有若干抓取组件,所述抓取组件的一侧设置有分拣机构,所述分拣机构位于抓取组件朝向传送机构传送方向的一侧。在抓取装置工作时,可先通过机体控制抓取组件移动至传送机构上方,随后控制各个分拣机构朝向传送机构移动,直至其与传送机构靠近后停止。随后可启动传送机构转动,传送机构则会将其表面的产品驱动,并通过各个分拣机构截留在各自抓取组件的正下方,以此即可在抓取组件没有配备产品追踪功能的时候,仍能保持每个抓取组件都能准确抓取产品。

一种自动抓取的搬运机器人.pdf
本发明提供一种自动抓取的搬运机器人,涉及智能机器人领域,包括基座,基座的顶部固定安装有转动箱,转动箱内腔的底部固定安装有第一电机,第一电机通过其一端的转轴传动连接有主动轮,电机的左侧设置有转动轴,转动轴中部的外表面固定安装有与主动轮相啮合的从动轮。该自动抓取的搬运机器人,通过在连接板的底部固定安装吸盘,能使该装置在抓取物品时,先通过吸盘将物品稍稍提起,再通过连接箱两侧铰接的连接杆相互靠近,使左夹板和右夹板相互闭合,可以防止搬运的物品过重,使吸盘掉落,避免物品掉落到地上,导致损坏,通过在支撑板的底部安装栏杆