
一种用于履带式电磁吸附爬壁机器人的传动机构.pdf

小云****66

1/4

2/4
3/4

4/4
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

一种用于履带式电磁吸附爬壁机器人的传动机构.pdf
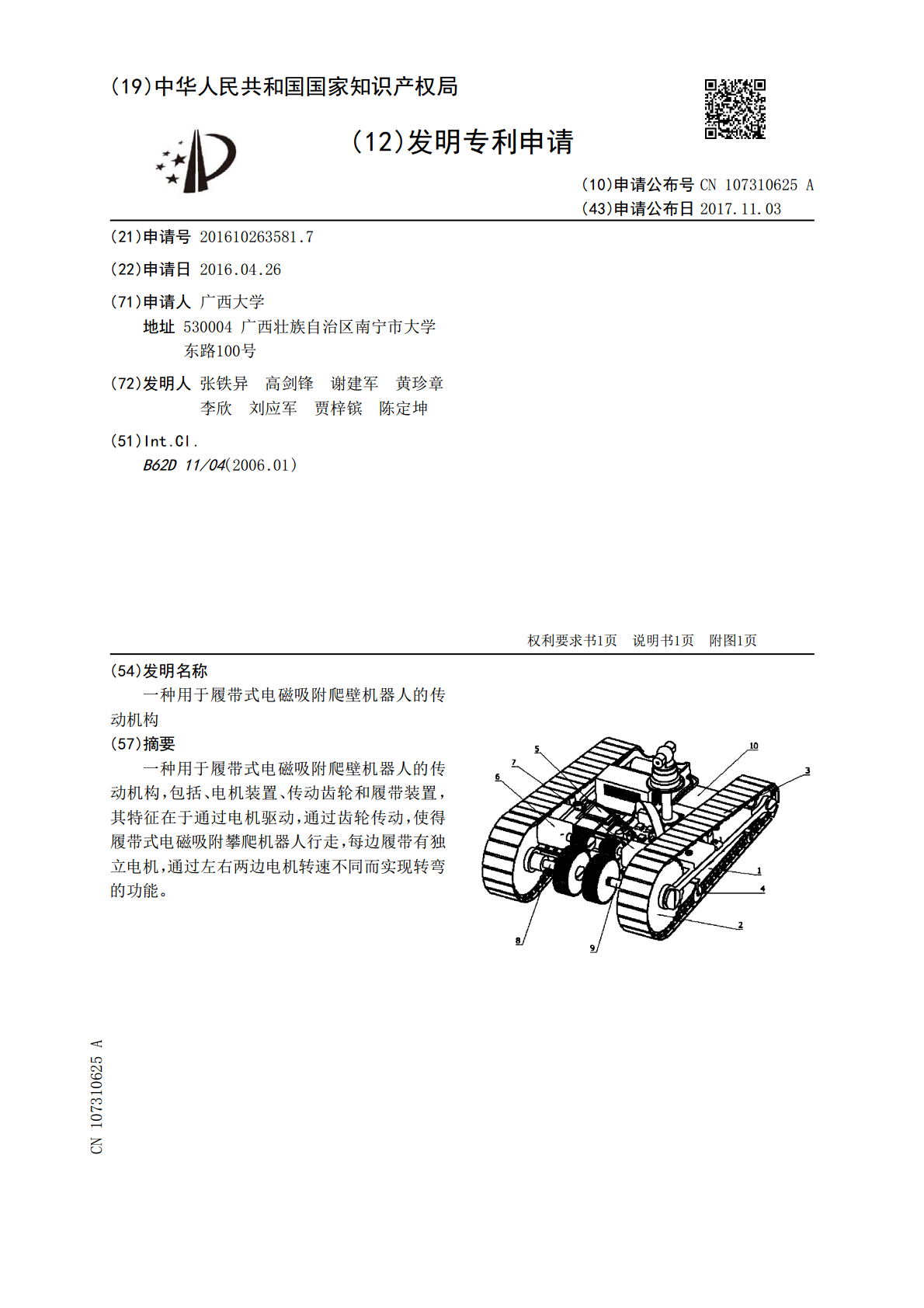
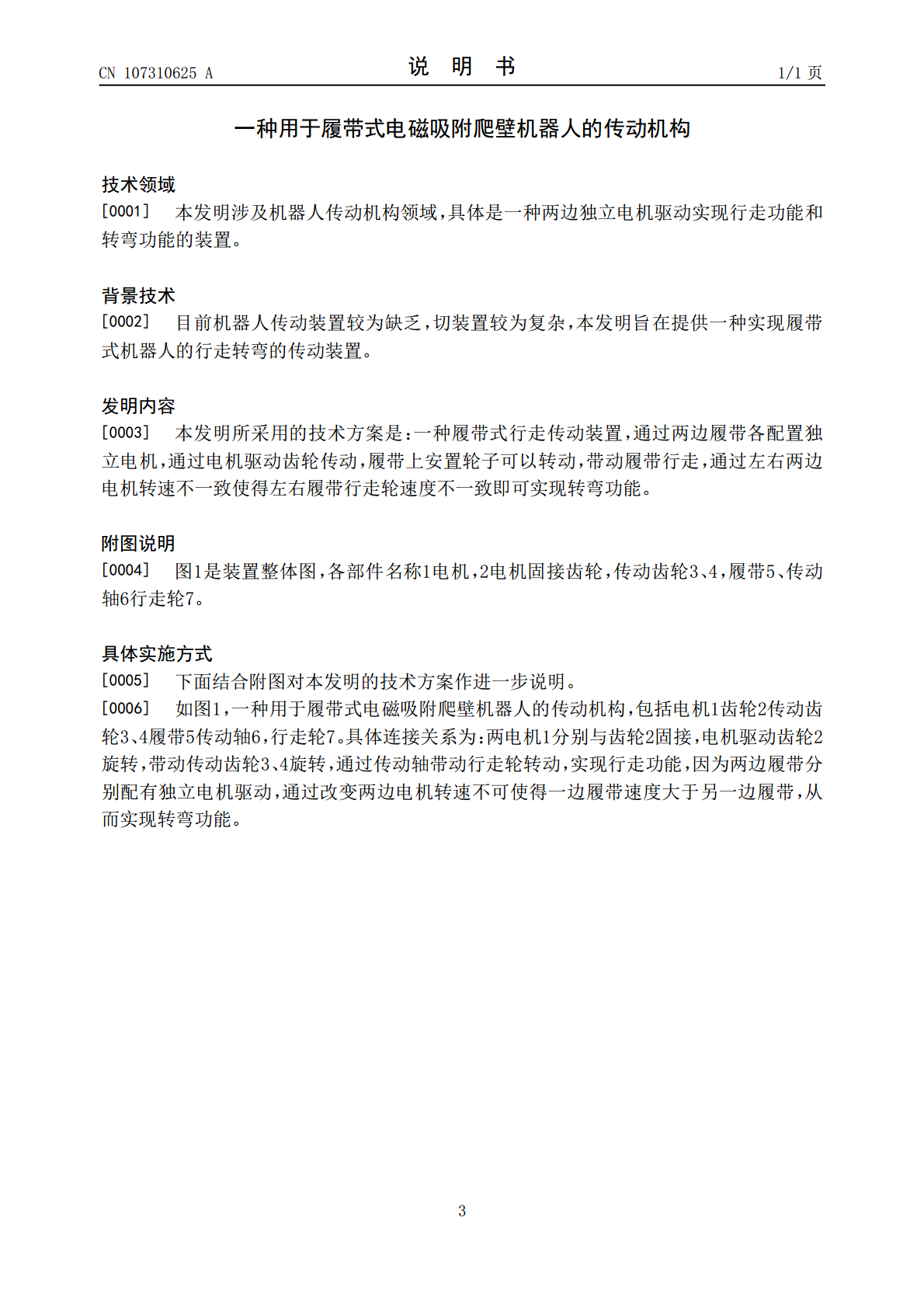
一种用于履带式电磁吸附爬壁机器人的传动机构,包括、电机装置、传动齿轮和履带装置,其特征在于通过电机驱动,通过齿轮传动,使得履带式电磁吸附攀爬机器人行走,每边履带有独立电机,通过左右两边电机转速不同而实现转弯的功能。
一种履带式电磁吸附爬壁机器人行走机构.pdf
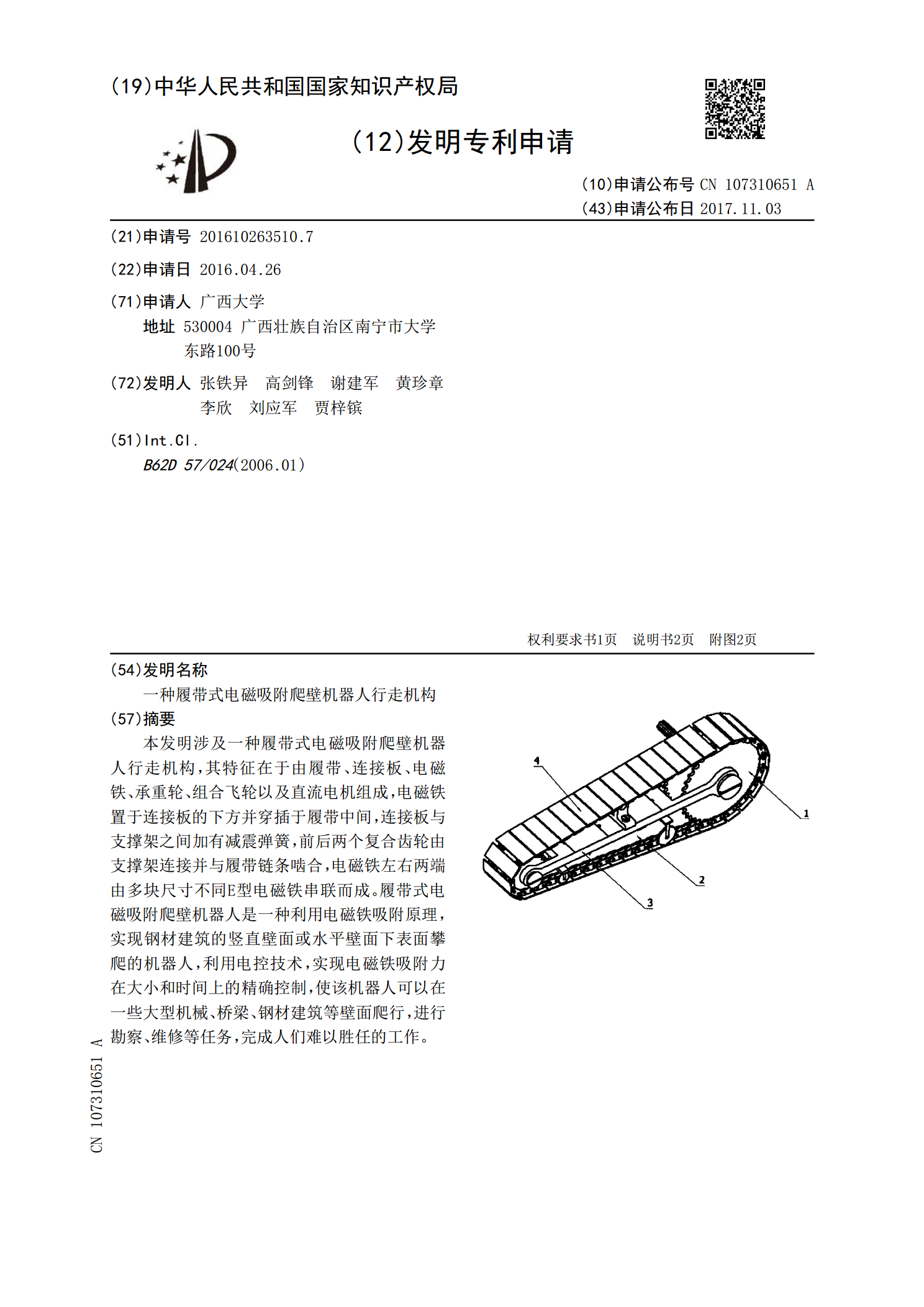
本发明涉及一种履带式电磁吸附爬壁机器人行走机构,其特征在于由履带、连接板、电磁铁、承重轮、组合飞轮以及直流电机组成,电磁铁置于连接板的下方并穿插于履带中间,连接板与支撑架之间加有减震弹簧,前后两个复合齿轮由支撑架连接并与履带链条啮合,电磁铁左右两端由多块尺寸不同E型电磁铁串联而成。履带式电磁吸附爬壁机器人是一种利用电磁铁吸附原理,实现钢材建筑的竖直壁面或水平壁面下表面攀爬的机器人,利用电控技术,实现电磁铁吸附力在大小和时间上的精确控制,使该机器人可以在一些大型机械、桥梁、钢材建筑等壁面爬行,进行勘察、维修

一种用于吸盘履带式爬壁机器人的吸附系统.pdf
本发明公开了一种用于吸盘履带式爬壁机器人的吸附系统,属于爬壁机器人吸附系统技术领域,其组成主要包括配气盘组件,吸盘组件,电磁换向阀,真空泵,配气盘组件有两个,分别与爬壁机器人的主动轮和从动轮同轴连接,当爬壁机器人行走时,处于主动轮处贴紧壁面的吸盘组件配气通路打开,真空泵经配气通路使吸盘腔产生负压,从而压紧壁面,处于从动轮处贴紧壁面的吸盘组件,其吸盘腔内的负压则经配气通路释放。本发明气动回路简单,管路数量少,布置方便,故障率低,配气控制容易,吸附可靠,行走自由。
一种磁吸附履带式爬壁机器人.pdf
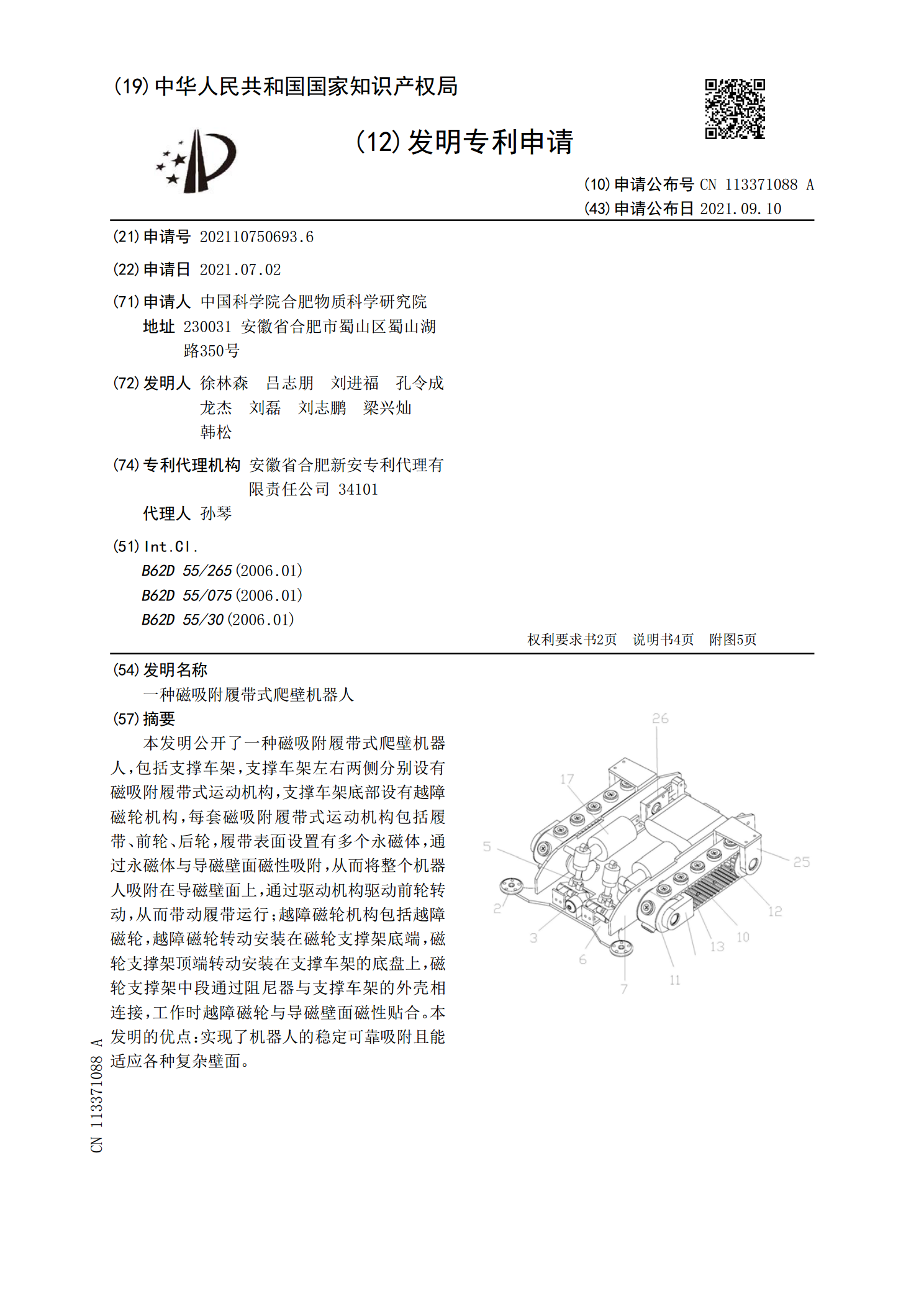
本发明公开了一种磁吸附履带式爬壁机器人,包括支撑车架,支撑车架左右两侧分别设有磁吸附履带式运动机构,支撑车架底部设有越障磁轮机构,每套磁吸附履带式运动机构包括履带、前轮、后轮,履带表面设置有多个永磁体,通过永磁体与导磁壁面磁性吸附,从而将整个机器人吸附在导磁壁面上,通过驱动机构驱动前轮转动,从而带动履带运行;越障磁轮机构包括越障磁轮,越障磁轮转动安装在磁轮支撑架底端,磁轮支撑架顶端转动安装在支撑车架的底盘上,磁轮支撑架中段通过阻尼器与支撑车架的外壳相连接,工作时越障磁轮与导磁壁面磁性贴合。本发明的优点:实
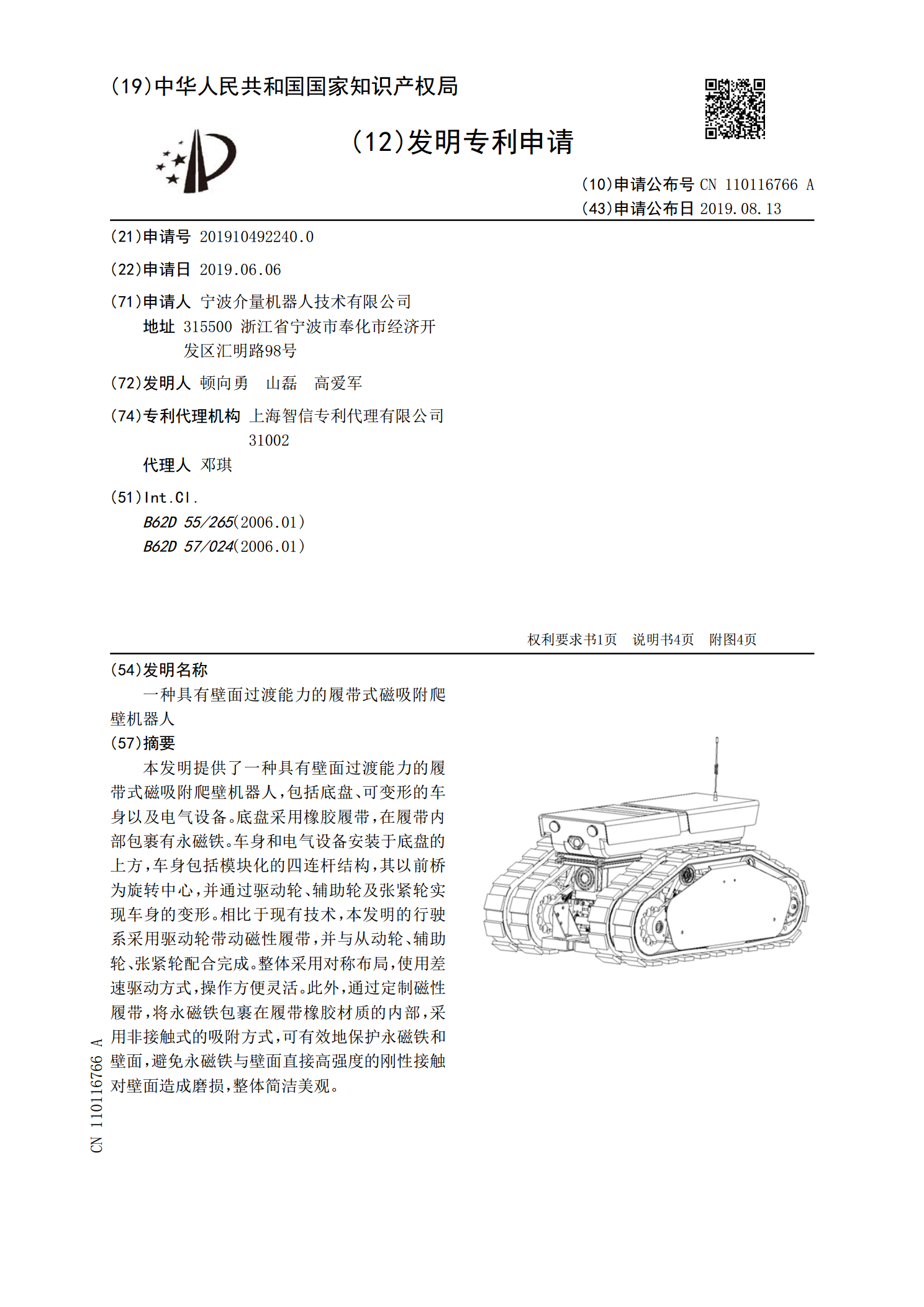
一种具有壁面过渡能力的履带式磁吸附爬壁机器人.pdf
本发明提供了一种具有壁面过渡能力的履带式磁吸附爬壁机器人,包括底盘、可变形的车身以及电气设备。底盘采用橡胶履带,在履带内部包裹有永磁铁。车身和电气设备安装于底盘的上方,车身包括模块化的四连杆结构,其以前桥为旋转中心,并通过驱动轮、辅助轮及张紧轮实现车身的变形。相比于现有技术,本发明的行驶系采用驱动轮带动磁性履带,并与从动轮、辅助轮、张紧轮配合完成。整体采用对称布局,使用差速驱动方式,操作方便灵活。此外,通过定制磁性履带,将永磁铁包裹在履带橡胶材质的内部,采用非接触式的吸附方式,可有效地保护永磁铁和壁面,避