
一种基于物联网的用于捕鱼的智能无人机.pdf

明钰****甜甜

1/10

2/10
3/10
4/10
5/10
6/10
7/10
8/10
9/10
10/10
亲,该文档总共14页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
一种基于物联网的用于捕鱼的智能无人机.pdf
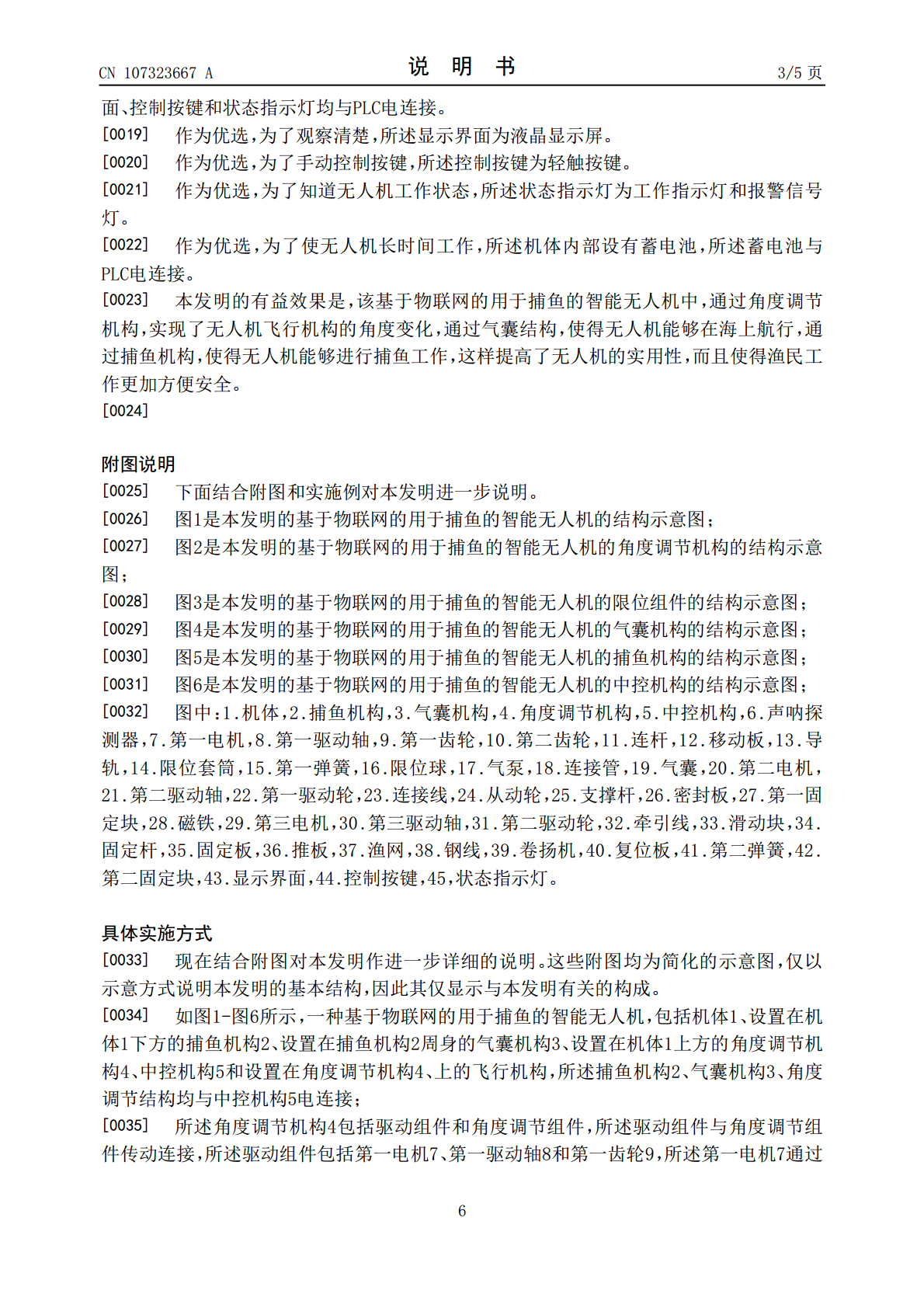
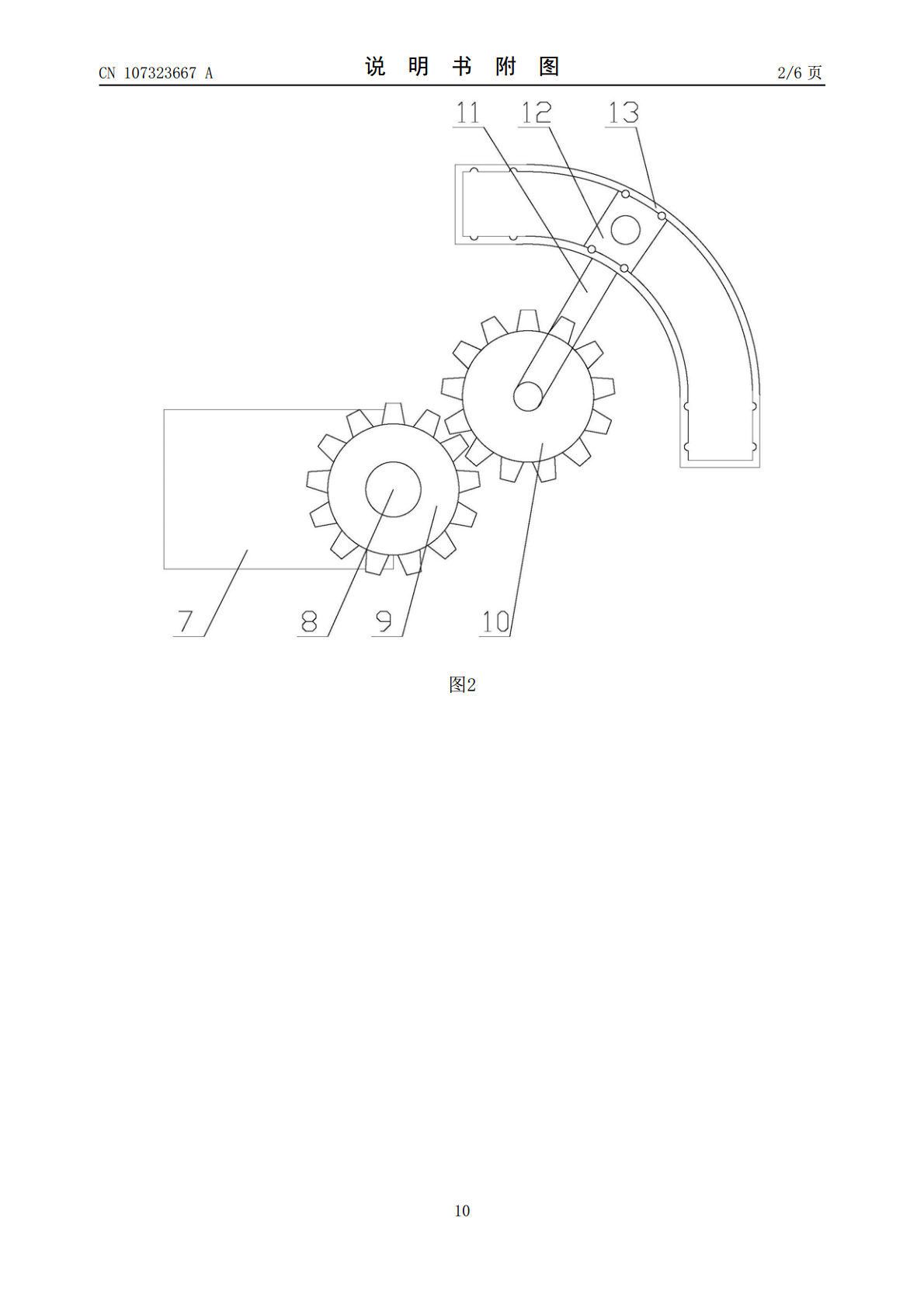
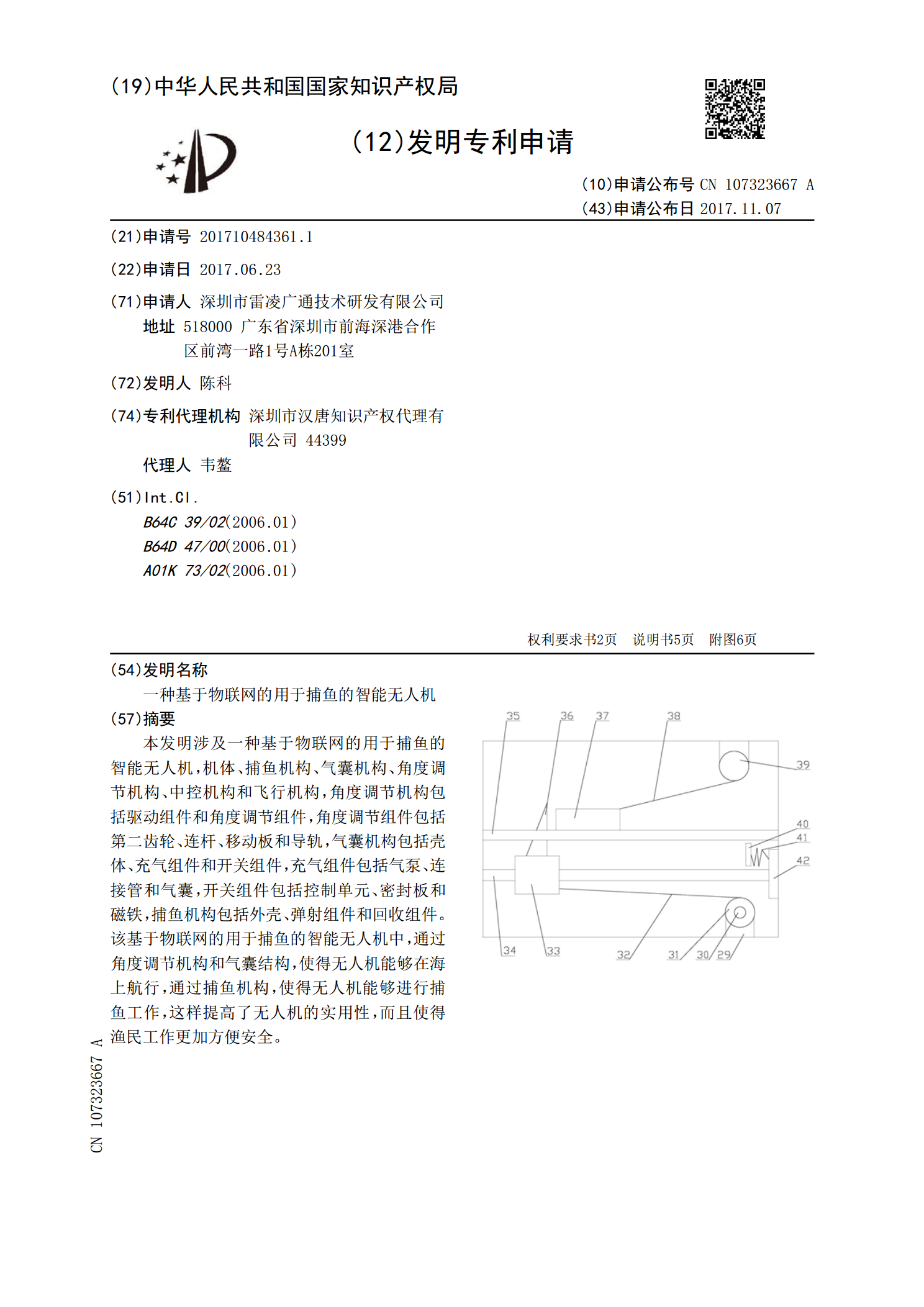
本发明涉及一种基于物联网的用于捕鱼的智能无人机,机体、捕鱼机构、气囊机构、角度调节机构、中控机构和飞行机构,角度调节机构包括驱动组件和角度调节组件,角度调节组件包括第二齿轮、连杆、移动板和导轨,气囊机构包括壳体、充气组件和开关组件,充气组件包括气泵、连接管和气囊,开关组件包括控制单元、密封板和磁铁,捕鱼机构包括外壳、弹射组件和回收组件。该基于物联网的用于捕鱼的智能无人机中,通过角度调节机构和气囊结构,使得无人机能够在海上航行,通过捕鱼机构,使得无人机能够进行捕鱼工作,这样提高了无人机的实用性,而且使得渔民

一种基于物联网的用于果实采摘的智能无人机.pdf
本发明涉及一种基于物联网的用于果实采摘的智能无人机,包括主体、发电机构、飞行机构和采摘机构,采摘机构包括角度调节组件、剪枝组件和收集组件,角度调节组件包括第三电机、第三驱动轴、转盘和固定杆,剪枝组件包括第四电机、第四驱动轴、伸缩单元、复位弹簧和两个刀片,收集组件包括收集篮和嵌入杆,该基于物联网的用于果实采摘的智能无人机中,通过角度调节组件实现了对各个方向的果实进行采摘,通过剪枝组件实现了对果实的安全可靠的采摘,同时通过限位单元与限位槽匹配,实现了收集篮的易拆装的特点,提高了无人机的实用性。
一种基于物联网的用于消防的智能型无人机.pdf
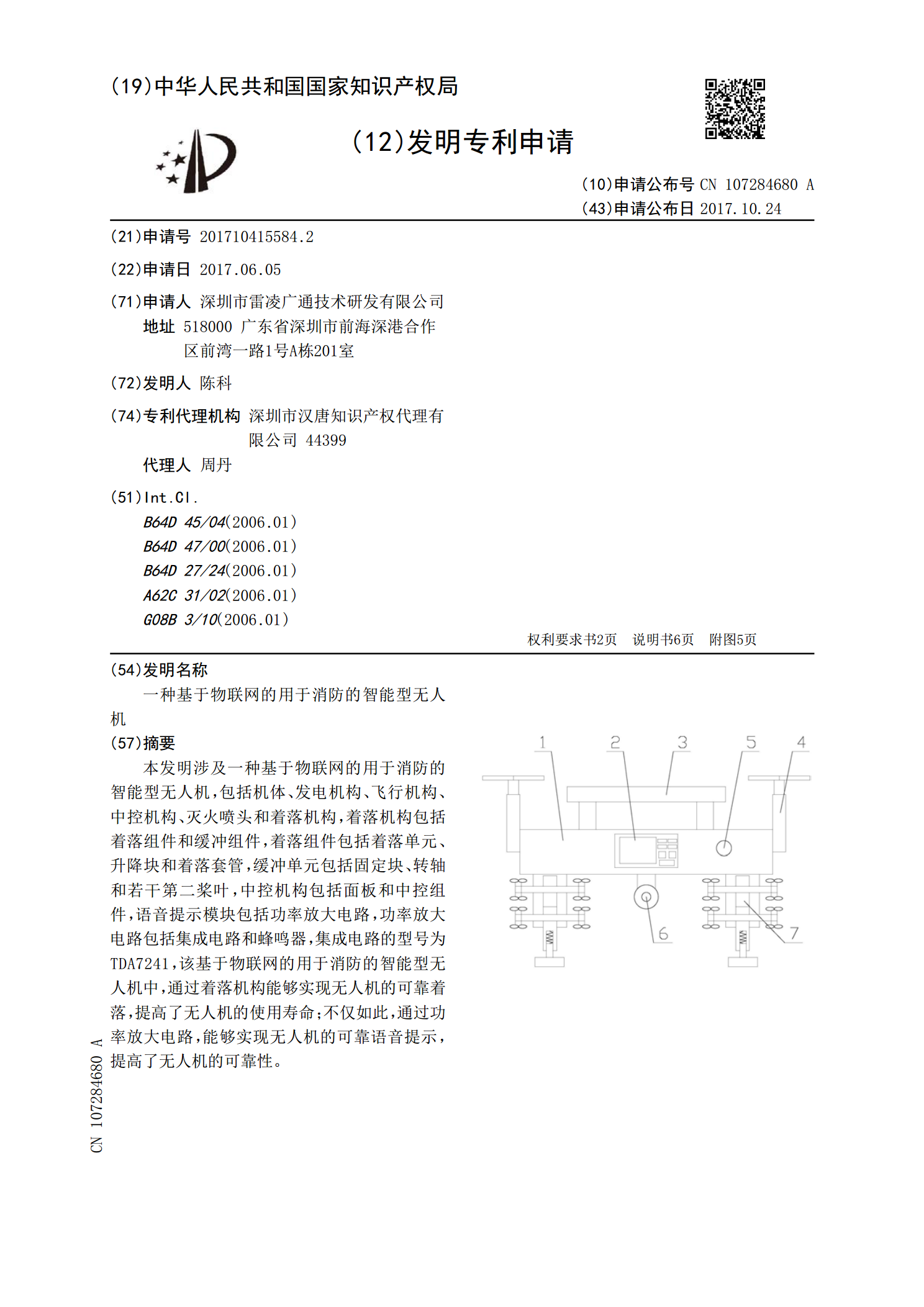
本发明涉及一种基于物联网的用于消防的智能型无人机,包括机体、发电机构、飞行机构、中控机构、灭火喷头和着落机构,着落机构包括着落组件和缓冲组件,着落组件包括着落单元、升降块和着落套管,缓冲单元包括固定块、转轴和若干第二桨叶,中控机构包括面板和中控组件,语音提示模块包括功率放大电路,功率放大电路包括集成电路和蜂鸣器,集成电路的型号为TDA7241,该基于物联网的用于消防的智能型无人机中,通过着落机构能够实现无人机的可靠着落,提高了无人机的使用寿命;不仅如此,通过功率放大电路,能够实现无人机的可靠语音提示,提高

一种基于物联网的智能搜救无人机.pdf
本发明涉及一种基于物联网的智能搜救无人机,包括主体、太阳能发电板、驱动机构、支撑架和摄像头,所述主体的下方还设有角度调节机构,所述角度调节机构与摄像头传动连接,该基于物联网的智能搜救无人机中,通过无线通讯模块能够保证工作人员对无人机进行远程操控,从而提高了无人机的智能化;通过主动活塞控制制动轮缸的动作,再由轮缸活塞控制制动蹄上的摩擦片与制动鼓发生摩擦,从而实现了无人机的快速减速;不仅如此,充电保护电路中,通过第一二极管对过电压进行监测,使得过充电流通过第一二极管和第四电阻的串联支路流过,该电路采用了常规的

一种基于物联网的用于电力巡线的高效智能无人机.pdf
本发明涉及一种基于物联网的用于电力巡线的高效智能无人机,包括主体、巡线机构和两个辅助机构,辅助机构包括支脚、侧板和除雪机构,除雪机构包括摆动单元和伸缩单元,摆动单元包括第三电机、第二驱动轮、固定轴和框架,巡线机构包括铰接块、摆动杆、平台、摄像头、闪光灯、红外热成像仪、滑杆、滑环和两个驱动单元,该基于物联网的用于电力巡线的高效智能无人机通过除雪机构除去雪后电力线路上的积雪,使电力线路温度逐渐恢复,便于红外热成像仪采集到清晰的图像,不仅如此,在夜晚时,利用巡线机构带动摆动杆来回摆动,由闪光灯增加拍摄亮度,保证