
一种二自由度平面运动并联机构.pdf

是秋****写意

1/10
2/10
3/10
4/10
5/10
6/10
7/10
8/10
9/10
10/10
亲,该文档总共11页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

一种二自由度平面运动并联机构.pdf
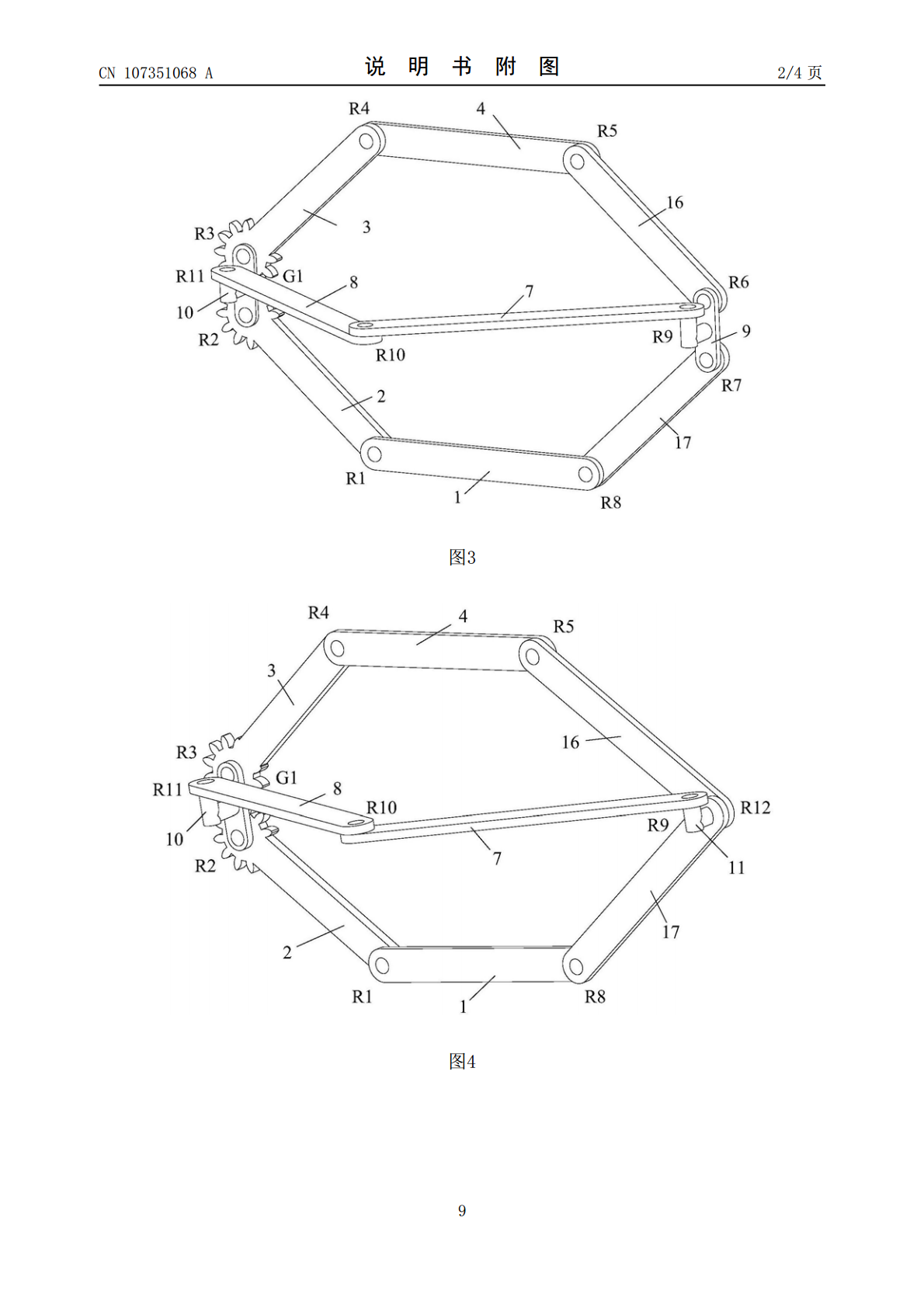
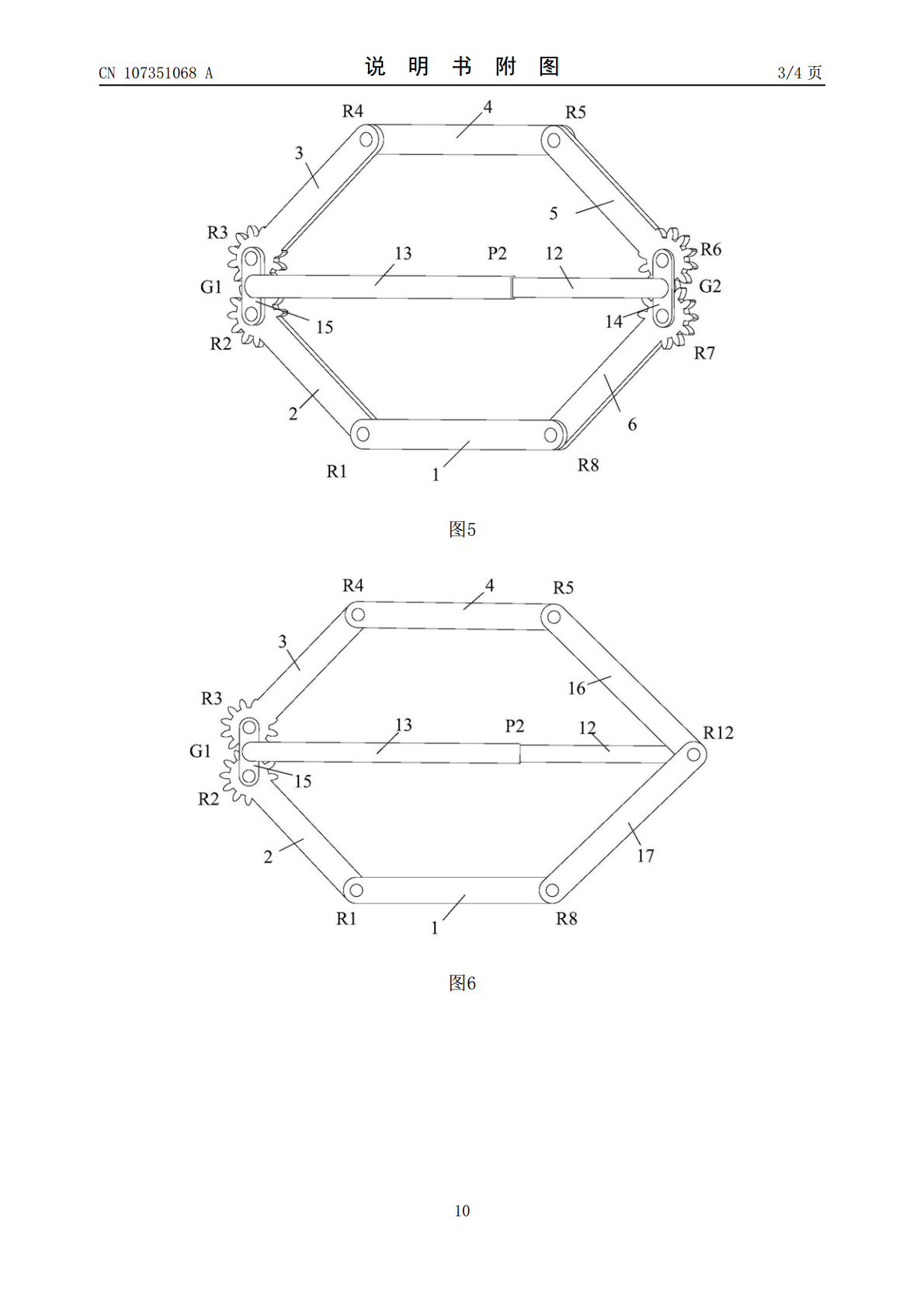
一种二自由度平面运动并联机构,它的第一连杆、齿轮连杆一、齿轮连杆二、第二连杆、齿轮连杆三和齿轮连杆四之间通过运动副依次连接,第三连杆的一端通过运动副与构件一连接,第三连杆的另一端通过运动副与第四连杆的一端连接,第四连杆的另一端通过运动副与构件二连接;其中齿轮连杆一和齿轮连杆二构成支链一,齿轮连杆三和齿轮连杆四构成支链二,中间部分第三、第四连杆和三个运动副构成三自由度平面子链一。本发明驱动方式简单,能够实现完全对称的运动,将每一个单元进行串联,可得到运动范围更大的结构。
一种二自由度球面并联机构.pdf
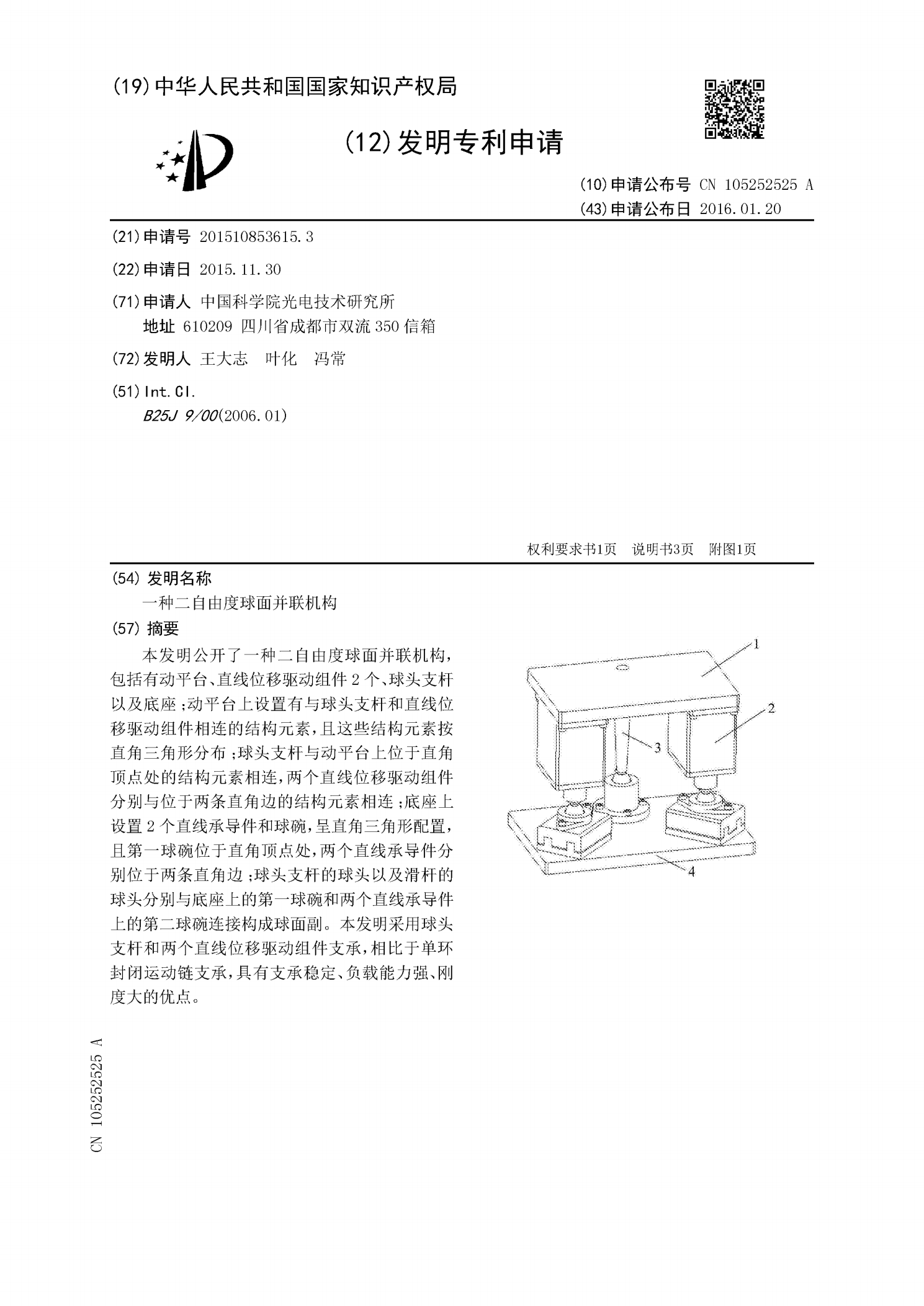
本发明公开了一种二自由度球面并联机构,包括有动平台、直线位移驱动组件2个、球头支杆以及底座;动平台上设置有与球头支杆和直线位移驱动组件相连的结构元素,且这些结构元素按直角三角形分布;球头支杆与动平台上位于直角顶点处的结构元素相连,两个直线位移驱动组件分别与位于两条直角边的结构元素相连;底座上设置2个直线承导件和球碗,呈直角三角形配置,且第一球碗位于直角顶点处,两个直线承导件分别位于两条直角边;球头支杆的球头以及滑杆的球头分别与底座上的第一球碗和两个直线承导件上的第二球碗连接构成球面副。本发明采用球头支杆和
机构运动简图及平面机构自由度.ppt
什么是平面机构?怎样表示平面机构才便于分析问题?如何才能知道机构是否合理?.转动副常见机构运动简图符号齿轮机构例1:偏心轮机构。与运动有关的只是偏心轮的外形心与转动中心之间的距离。●雷达天线的俯仰角调节机构只是一个单独的平面连杆机构。用运动副联结后,彼此的相对运动受到某些约束1、自由度计算公式:n=3;PL=4;Ph=0F=3×3-2×4=1原动件数大于自由度数424惯性筛机构例题F=3n-2PL-PH=3-2-F=3n-2PL-PH=3-2-复平面机构的组成:构件、运动副机构运动简图绘制掌握常见
一种二自由度绳牵引并联机构.pdf
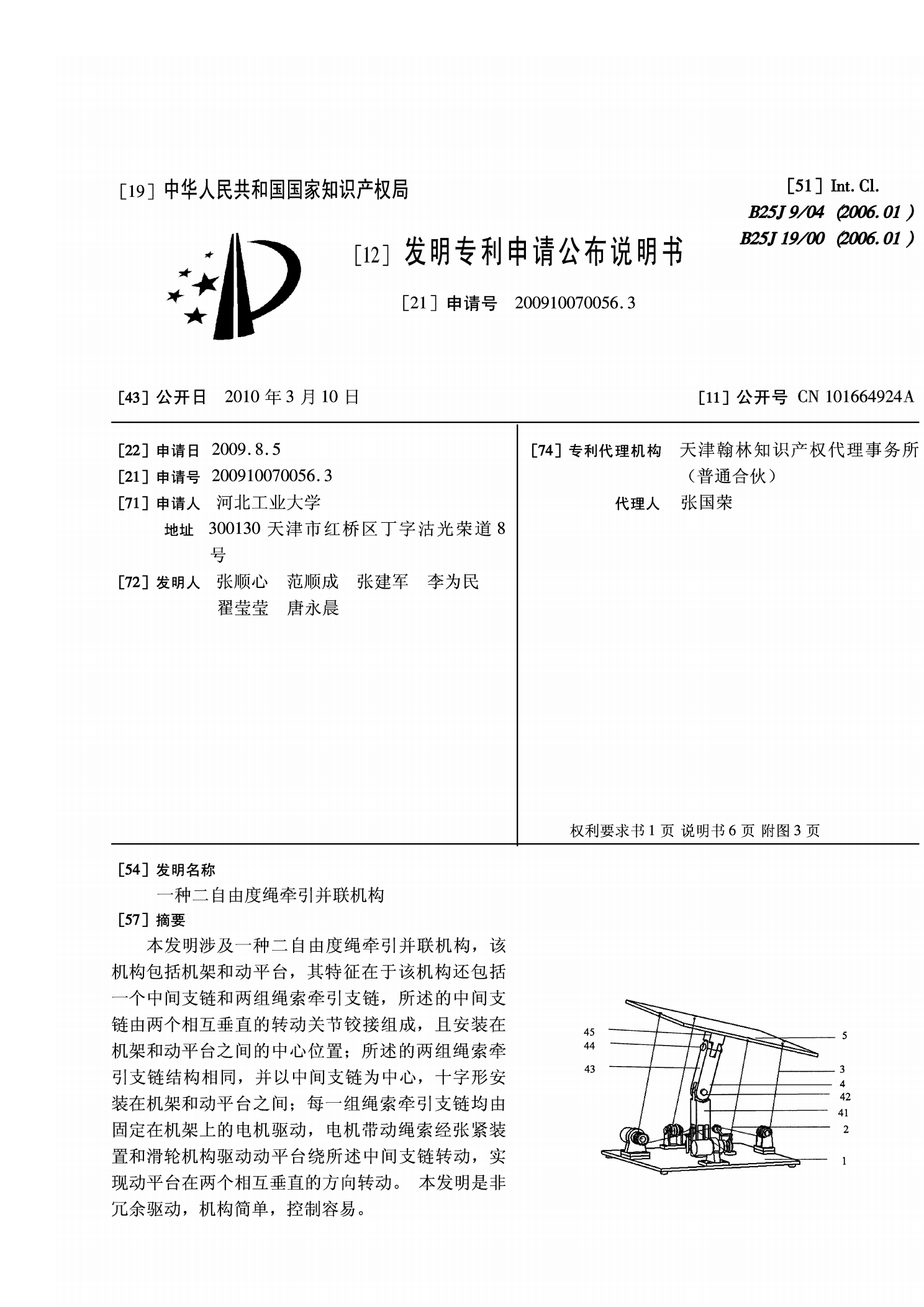
本发明涉及一种二自由度绳牵引并联机构,该机构包括机架和动平台,其特征在于该机构还包括一个中间支链和两组绳索牵引支链,所述的中间支链由两个相互垂直的转动关节铰接组成,且安装在机架和动平台之间的中心位置;所述的两组绳索牵引支链结构相同,并以中间支链为中心,十字形安装在机架和动平台之间;每一组绳索牵引支链均由固定在机架上的电机驱动,电机带动绳索经张紧装置和滑轮机构驱动动平台绕所述中间支链转动,实现动平台在两个相互垂直的方向转动。本发明是非冗余驱动,机构简单,控制容易。
一种冗余驱动平面两自由度并联打磨机器人的运动机构.pdf
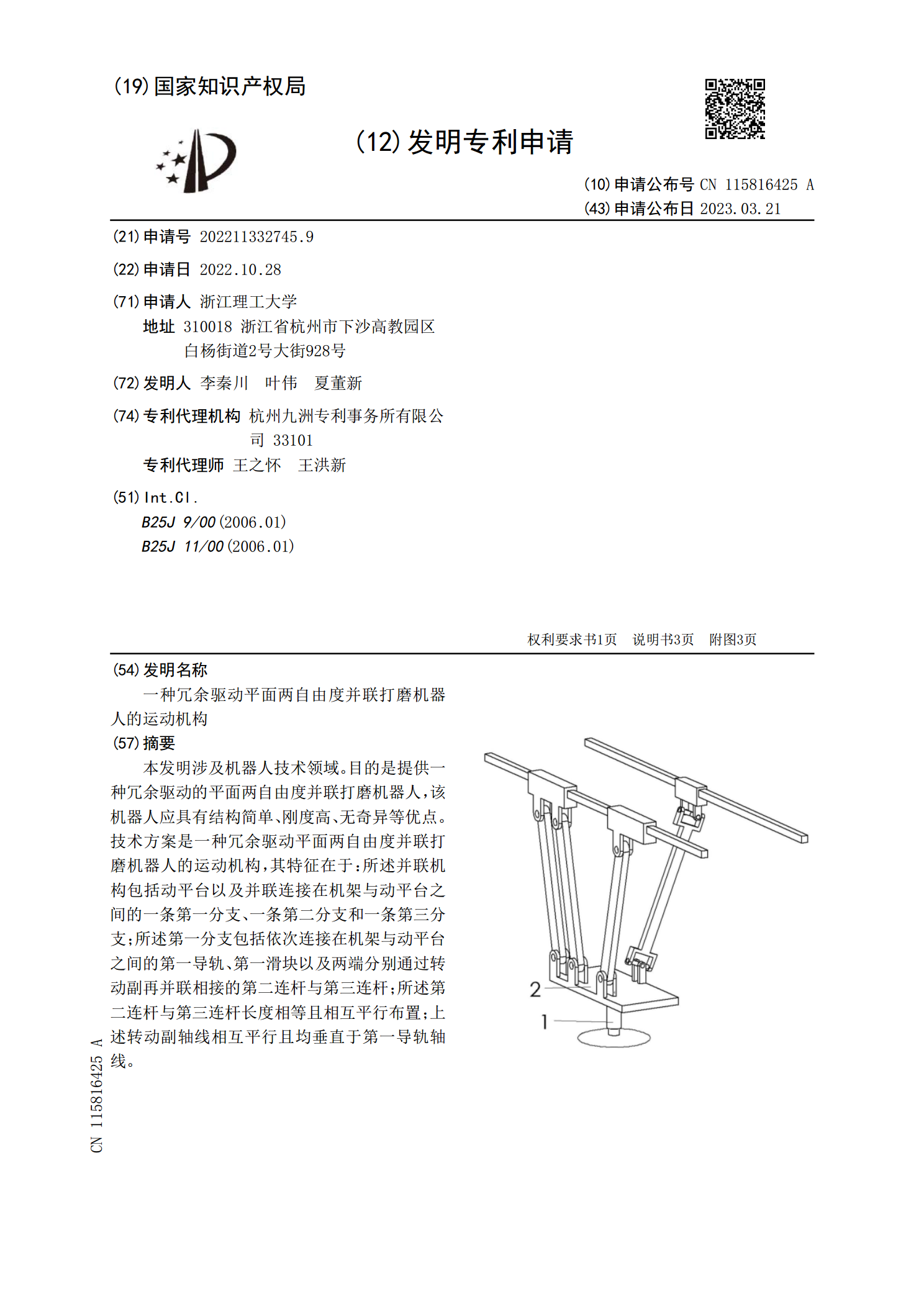
本发明涉及机器人技术领域。目的是提供一种冗余驱动的平面两自由度并联打磨机器人,该机器人应具有结构简单、刚度高、无奇异等优点。技术方案是一种冗余驱动平面两自由度并联打磨机器人的运动机构,其特征在于:所述并联机构包括动平台以及并联连接在机架与动平台之间的一条第一分支、一条第二分支和一条第三分支;所述第一分支包括依次连接在机架与动平台之间的第一导轨、第一滑块以及两端分别通过转动副再并联相接的第二连杆与第三连杆;所述第二连杆与第三连杆长度相等且相互平行布置;上述转动副轴线相互平行且均垂直于第一导轨轴线。