
一种无人机导航方法及装置.pdf

萌运****魔王

1/10

2/10

3/10

4/10
5/10

6/10

7/10
8/10
9/10

10/10
亲,该文档总共15页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

一种无人机导航方法及装置.pdf
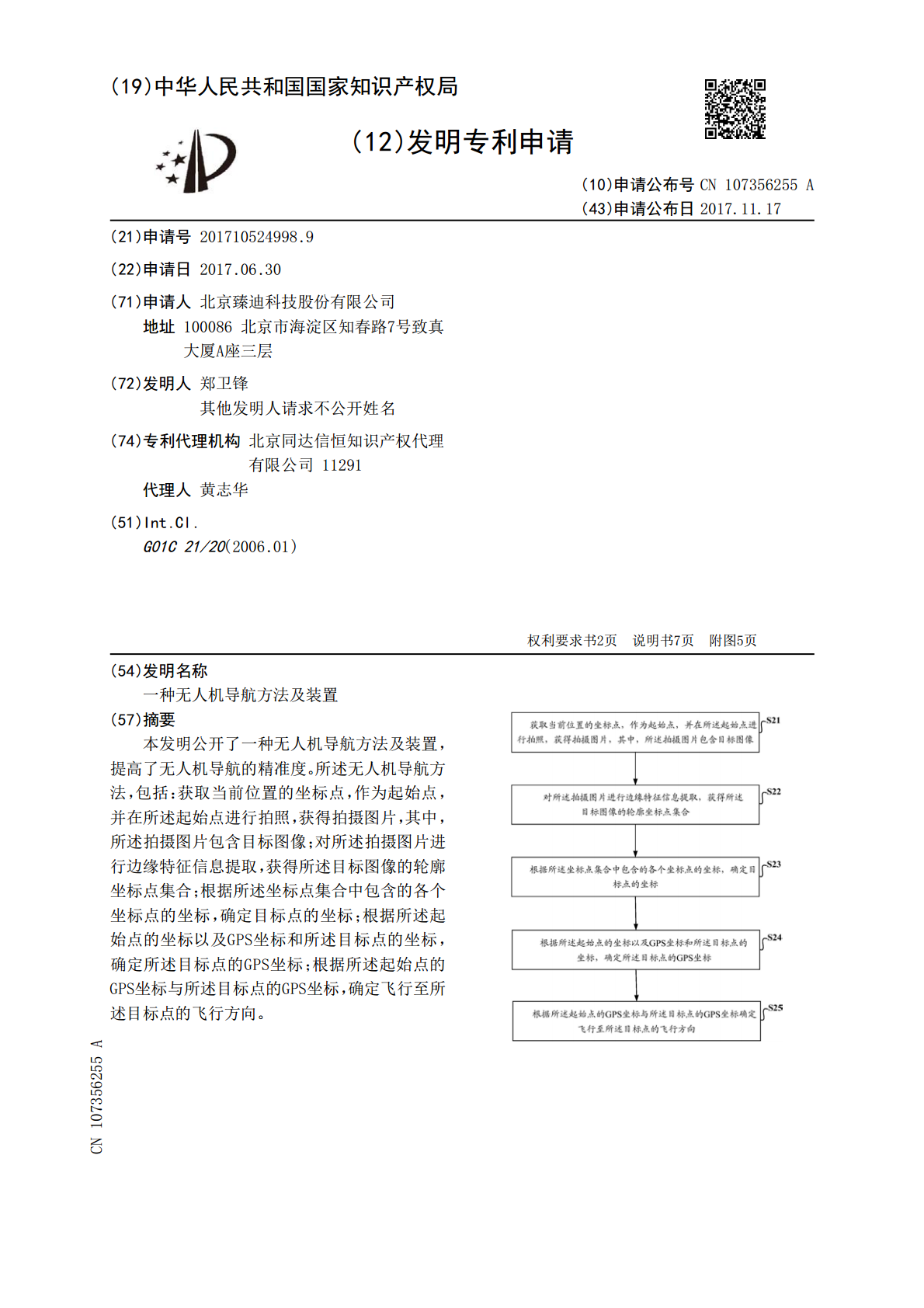
本发明公开了一种无人机导航方法及装置,提高了无人机导航的精准度。所述无人机导航方法,包括:获取当前位置的坐标点,作为起始点,并在所述起始点进行拍照,获得拍摄图片,其中,所述拍摄图片包含目标图像;对所述拍摄图片进行边缘特征信息提取,获得所述目标图像的轮廓坐标点集合;根据所述坐标点集合中包含的各个坐标点的坐标,确定目标点的坐标;根据所述起始点的坐标以及GPS坐标和所述目标点的坐标,确定所述目标点的GPS坐标;根据所述起始点的GPS坐标与所述目标点的GPS坐标,确定飞行至所述目标点的飞行方向。
无人机导航方法、装置、无人机和存储介质.pdf
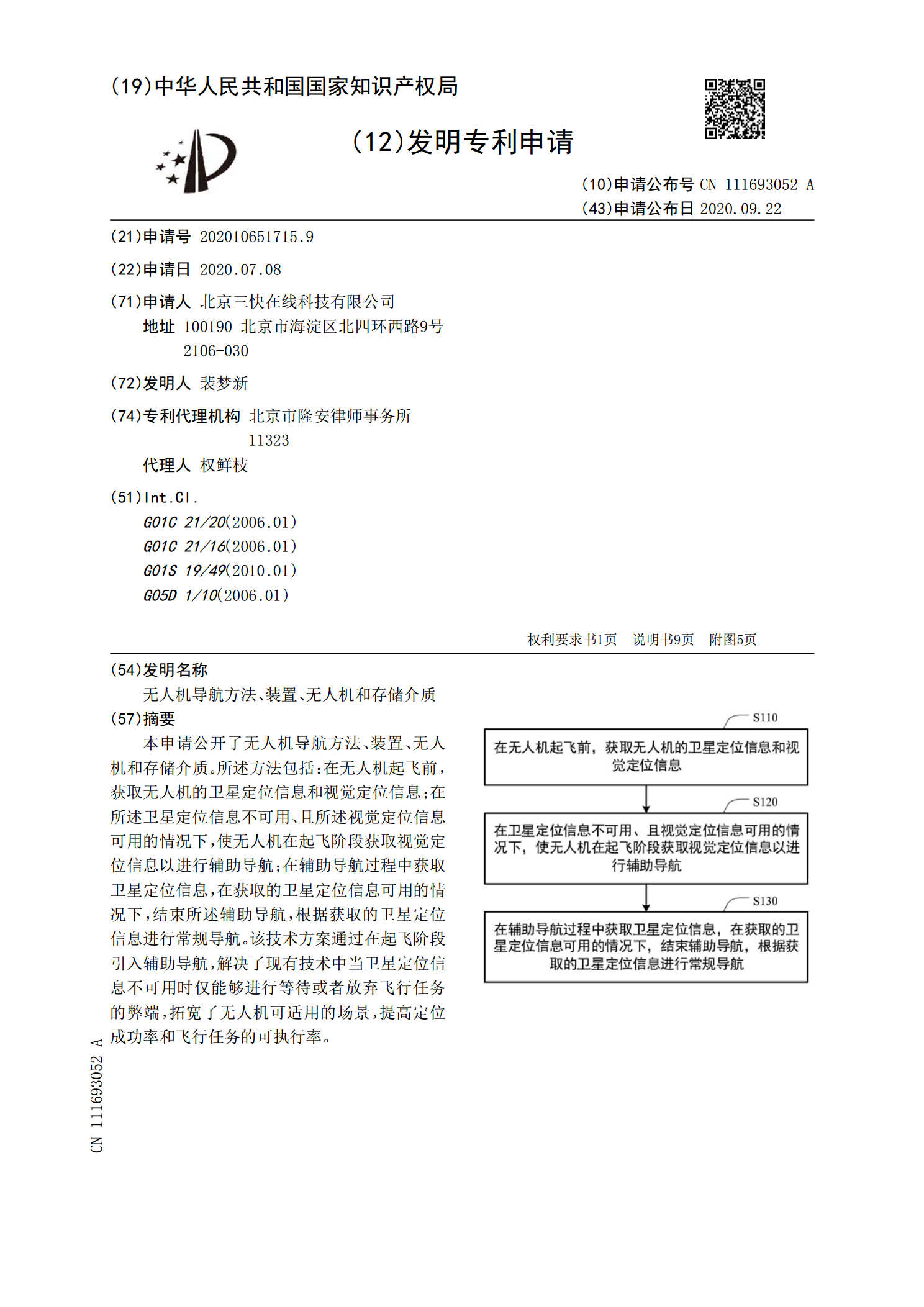
本申请公开了无人机导航方法、装置、无人机和存储介质。所述方法包括:在无人机起飞前,获取无人机的卫星定位信息和视觉定位信息;在所述卫星定位信息不可用、且所述视觉定位信息可用的情况下,使无人机在起飞阶段获取视觉定位信息以进行辅助导航;在辅助导航过程中获取卫星定位信息,在获取的卫星定位信息可用的情况下,结束所述辅助导航,根据获取的卫星定位信息进行常规导航。该技术方案通过在起飞阶段引入辅助导航,解决了现有技术中当卫星定位信息不可用时仅能够进行等待或者放弃飞行任务的弊端,拓宽了无人机可适用的场景,提高定位成功率和飞

一种导航方法及导航装置.pdf
本发明实施例提供一种导航方法及导航装置,包括:接收导航路线搜索请求,根据所述导航路线搜索请求获取对应的导航数据;监听用户输入的提醒规则,并生成所述导航数据对应的提醒通知,其中,所述提醒规则包括触发条件与所述提醒通知的关联关系;在本地信息与触发条件相匹配时,弹出所述触发条件对应的提醒通知;接收针对所述提醒通知的选择指令,并根据所述选择指令展示所述导航数据。本发明实施例提供的导航方法及导航装置,通过应用通知的方式,将用户预设的提醒通知推送至导航装置的主界面中,根据用户的选择指令可直接展示提醒通知对应的导航数据
一种盲人导航提醒装置及导航方法.pdf
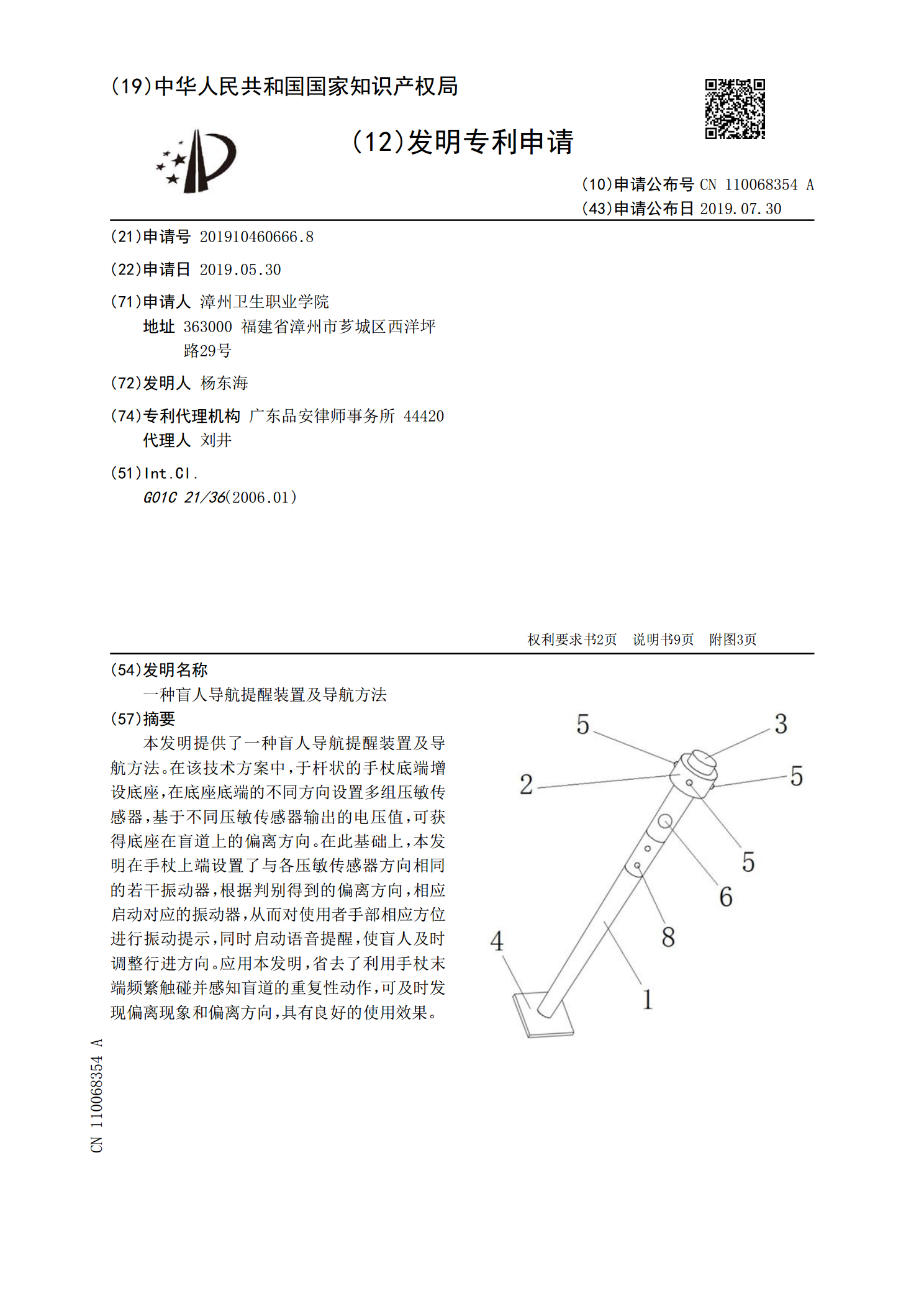
本发明提供了一种盲人导航提醒装置及导航方法。在该技术方案中,于杆状的手杖底端增设底座,在底座底端的不同方向设置多组压敏传感器,基于不同压敏传感器输出的电压值,可获得底座在盲道上的偏离方向。在此基础上,本发明在手杖上端设置了与各压敏传感器方向相同的若干振动器,根据判别得到的偏离方向,相应启动对应的振动器,从而对使用者手部相应方位进行振动提示,同时启动语音提醒,使盲人及时调整行进方向。应用本发明,省去了利用手杖末端频繁触碰并感知盲道的重复性动作,可及时发现偏离现象和偏离方向,具有良好的使用效果。

一种导航方法及其装置、导航仪.pdf
本申请提供一种导航方法及其装置、导航仪,本申请所述方法包括:根据接收的输入指令,获得所述便携装置的工作模式;间隔预设时间周期,实时地获取并保存所述便携装置的当前位置信息;采用与所述工作模式对应的显示方式,显示所述当前位置信息。本申请并未带有地图数据和移动通信模块,减少了由于地图不精细以及移动信号差带来的安全隐患。