
一种夹取力自动控制的搬运机器人.pdf

静芙****可爱


1/8
2/8

3/8

4/8
5/8

6/8
7/8

8/8
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料
一种夹取力自动控制的搬运机器人.pdf
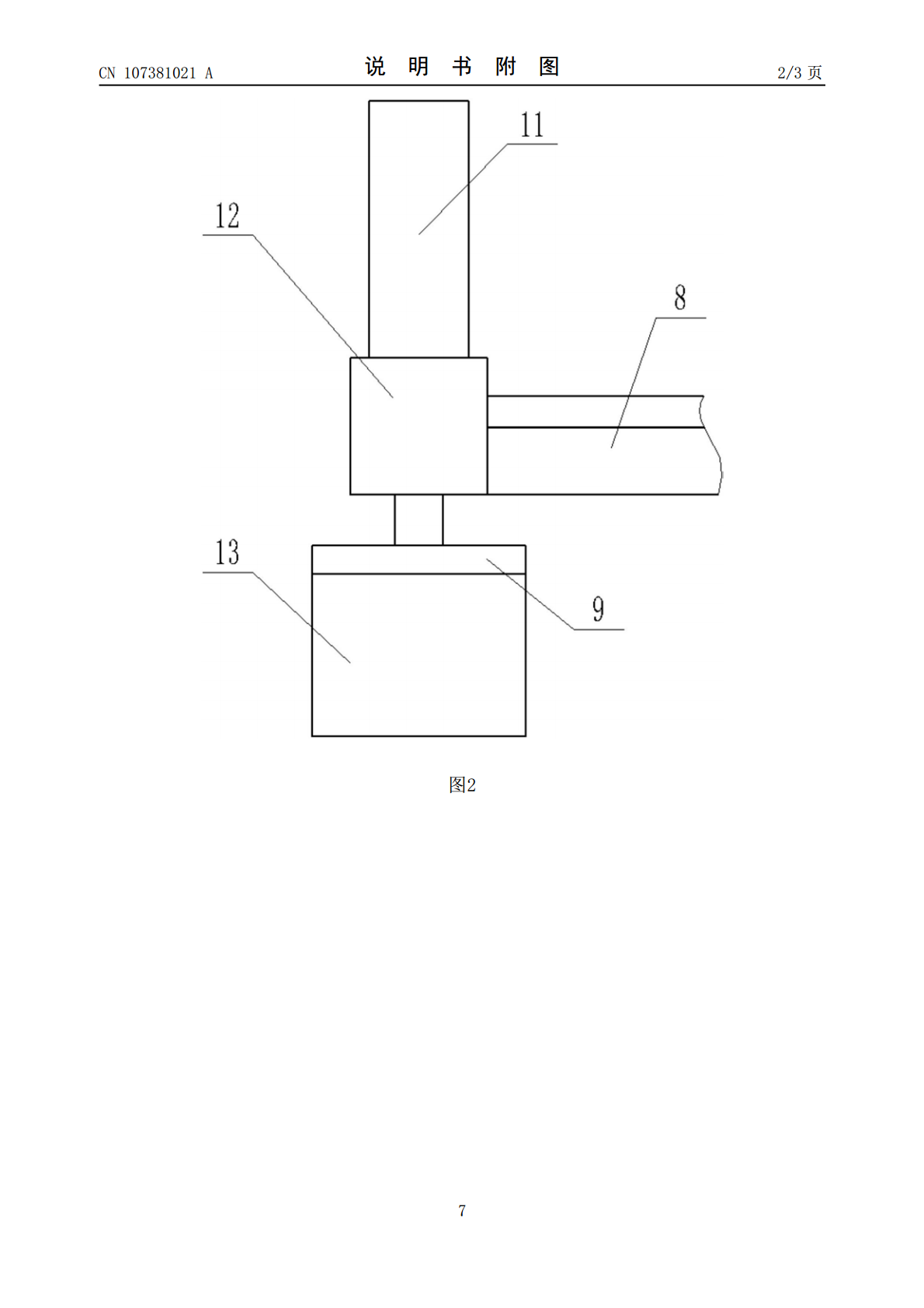
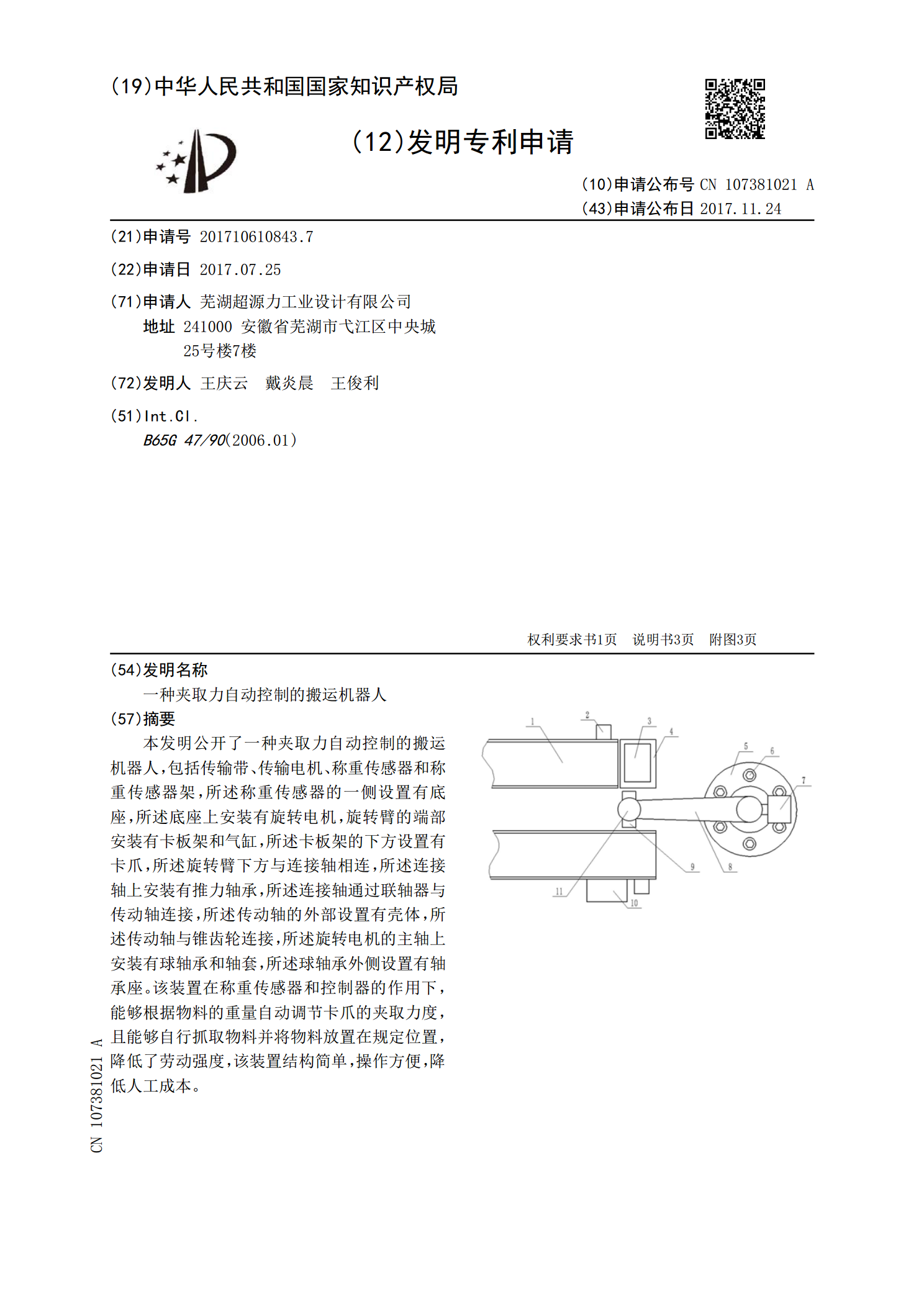
本发明公开了一种夹取力自动控制的搬运机器人,包括传输带、传输电机、称重传感器和称重传感器架,所述称重传感器的一侧设置有底座,所述底座上安装有旋转电机,旋转臂的端部安装有卡板架和气缸,所述卡板架的下方设置有卡爪,所述旋转臂下方与连接轴相连,所述连接轴上安装有推力轴承,所述连接轴通过联轴器与传动轴连接,所述传动轴的外部设置有壳体,所述传动轴与锥齿轮连接,所述旋转电机的主轴上安装有球轴承和轴套,所述球轴承外侧设置有轴承座。该装置在称重传感器和控制器的作用下,能够根据物料的重量自动调节卡爪的夹取力度,且能够自行抓

一种夹取搬运机构及其操作方法.pdf
本发明提供一种夹取搬运机构,包括底部支撑架,底部支撑架上设置有机械手安装板,所述机械手安装板靠近锚具合并机构的一面上固定有沿x轴方向设置的平移滑轨,搬运机械手与平移滑轨通过滑块连接,所述底部支撑架上设置有驱动搬运机械手沿平移滑轨滑动的驱动气缸,所述机械手安装板上还固定连接有缓冲机构。本发明提供一种自动化程度高、夹取搬运精确性高、生产效率高的夹取搬运机构及其操作方法。
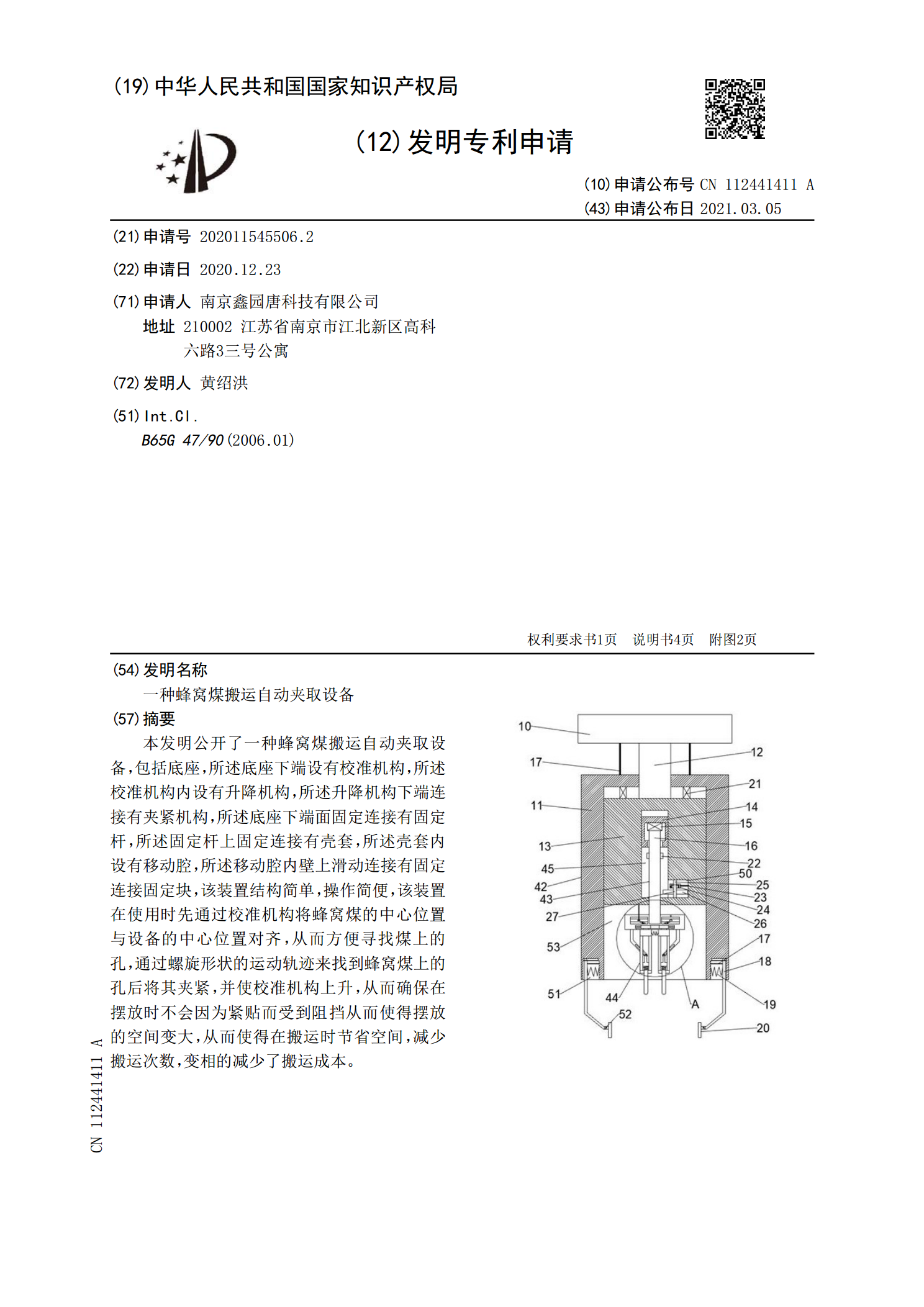
一种蜂窝煤搬运自动夹取设备.pdf
本发明公开了一种蜂窝煤搬运自动夹取设备,包括底座,所述底座下端设有校准机构,所述校准机构内设有升降机构,所述升降机构下端连接有夹紧机构,所述底座下端面固定连接有固定杆,所述固定杆上固定连接有壳套,所述壳套内设有移动腔,所述移动腔内壁上滑动连接有固定连接固定块,该装置结构简单,操作简便,该装置在使用时先通过校准机构将蜂窝煤的中心位置与设备的中心位置对齐,从而方便寻找煤上的孔,通过螺旋形状的运动轨迹来找到蜂窝煤上的孔后将其夹紧,并使校准机构上升,从而确保在摆放时不会因为紧贴而受到阻挡从而使得摆放的空间变大,从
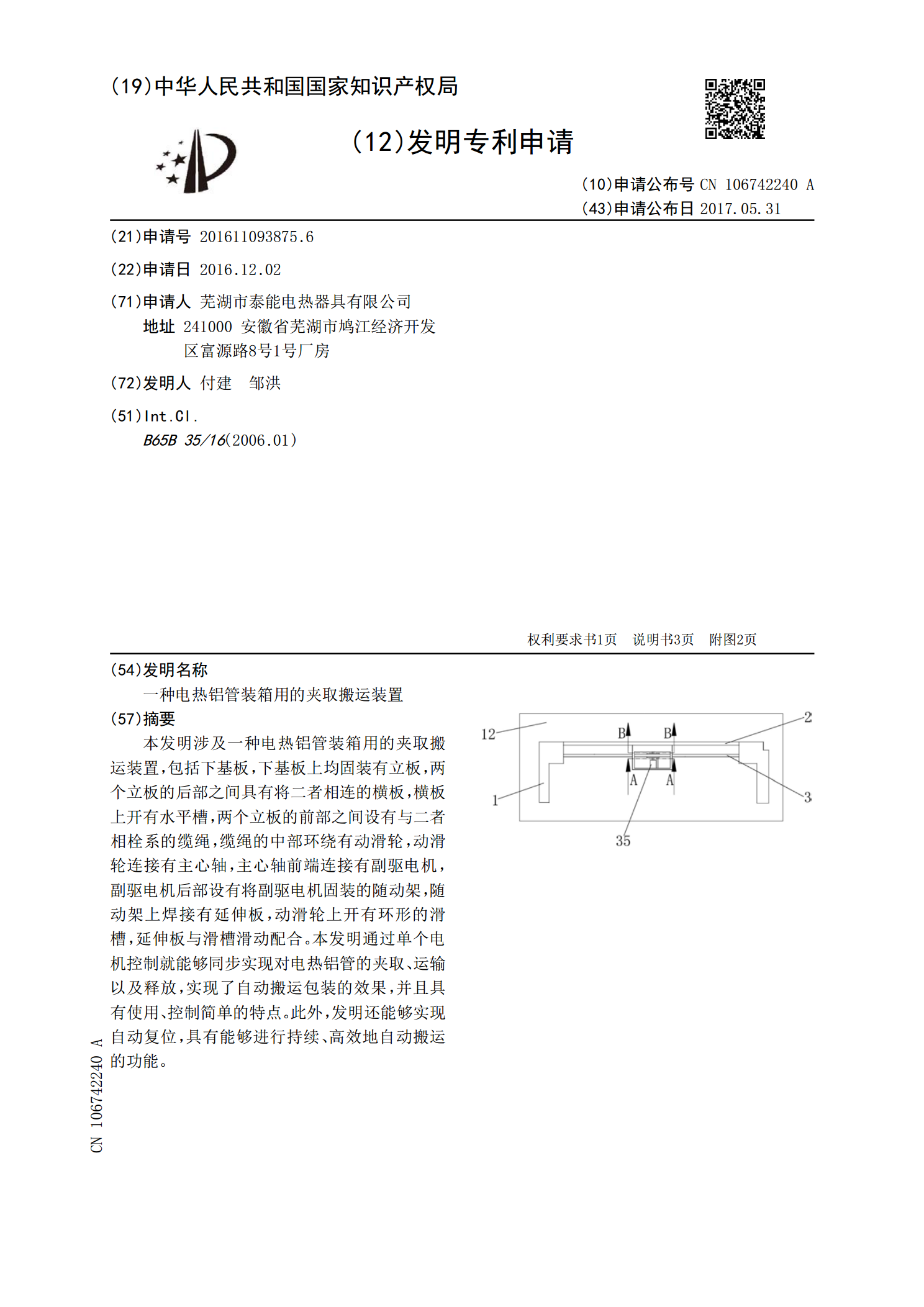
一种电热铝管装箱用的夹取搬运装置.pdf
本发明涉及一种电热铝管装箱用的夹取搬运装置,包括下基板,下基板上均固装有立板,两个立板的后部之间具有将二者相连的横板,横板上开有水平槽,两个立板的前部之间设有与二者相栓系的缆绳,缆绳的中部环绕有动滑轮,动滑轮连接有主心轴,主心轴前端连接有副驱电机,副驱电机后部设有将副驱电机固装的随动架,随动架上焊接有延伸板,动滑轮上开有环形的滑槽,延伸板与滑槽滑动配合。本发明通过单个电机控制就能够同步实现对电热铝管的夹取、运输以及释放,实现了自动搬运包装的效果,并且具有使用、控制简单的特点。此外,发明还能够实现自动复位,

一种工业机器人夹取装置.pdf
本发明公开了一种工业机器人夹取装置,属于工业机器人技术领域,解决了现有装置不能辅助机器人对不同体积大小的货物进行夹取的问题;其技术特征是:包括底座和限位板,底座的上方设有限位板,限位板的顶部固定安装有盖板,限位板设有两个,限位板之间设有用于夹取货物的夹取机构,底座内设有驱动腔,驱动腔内设有驱动组件;本发明实施例能够对不同货物进行夹取,且方便了对物品的码垛。减轻了工作人员的负担,提高了货物夹取效率,需要调节夹取机构高度时,开启伺服电机,伺服电机带动转轴转动,从而使得伺服电机带动转轴和主齿轮转动,主齿轮带动副