
具有自锁功能的丝杠传动齿啮合式离合器.pdf

宁馨****找我

1/6
2/6
3/6
4/6
5/6
6/6
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料
具有自锁功能的丝杠传动齿啮合式离合器.pdf
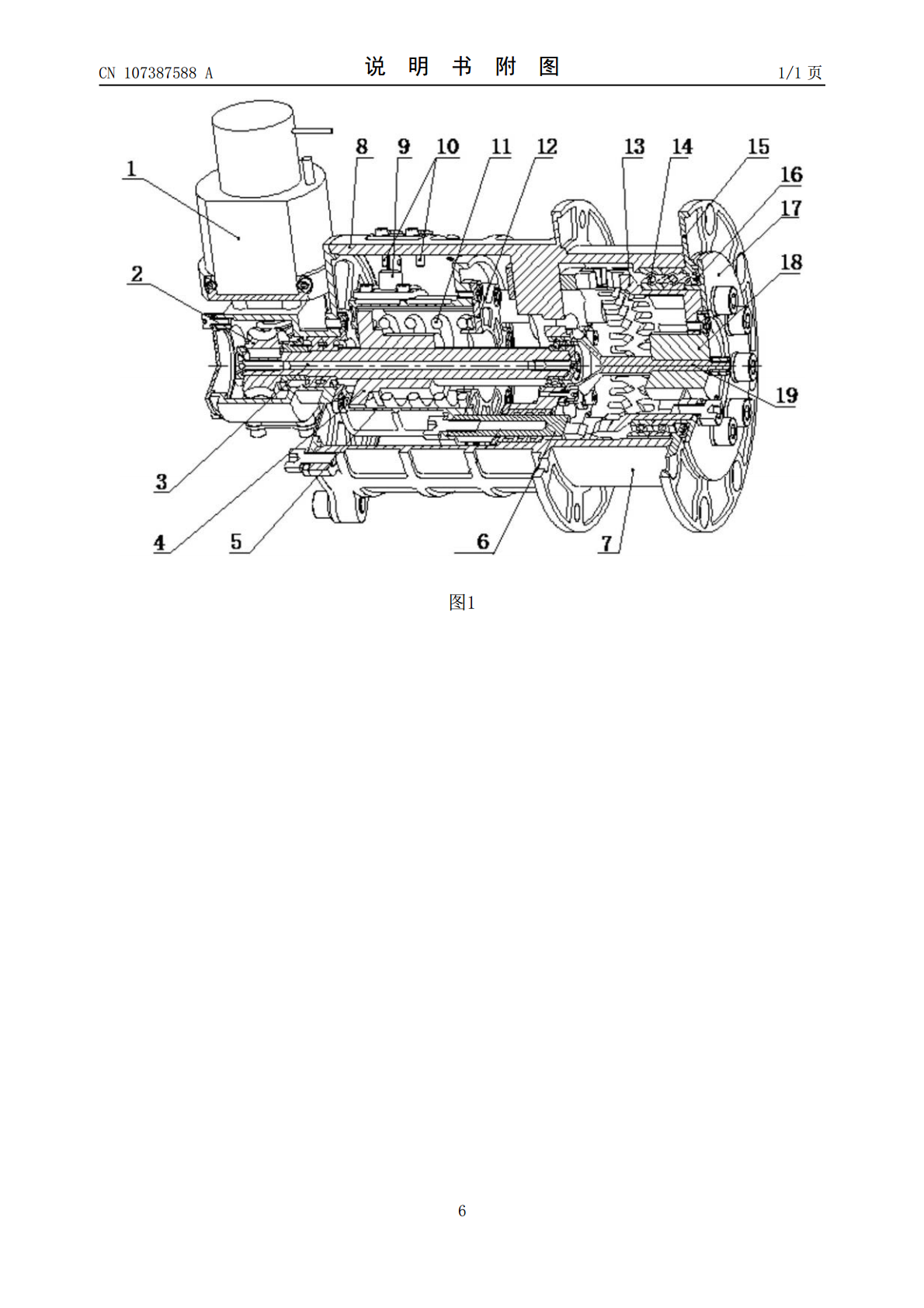
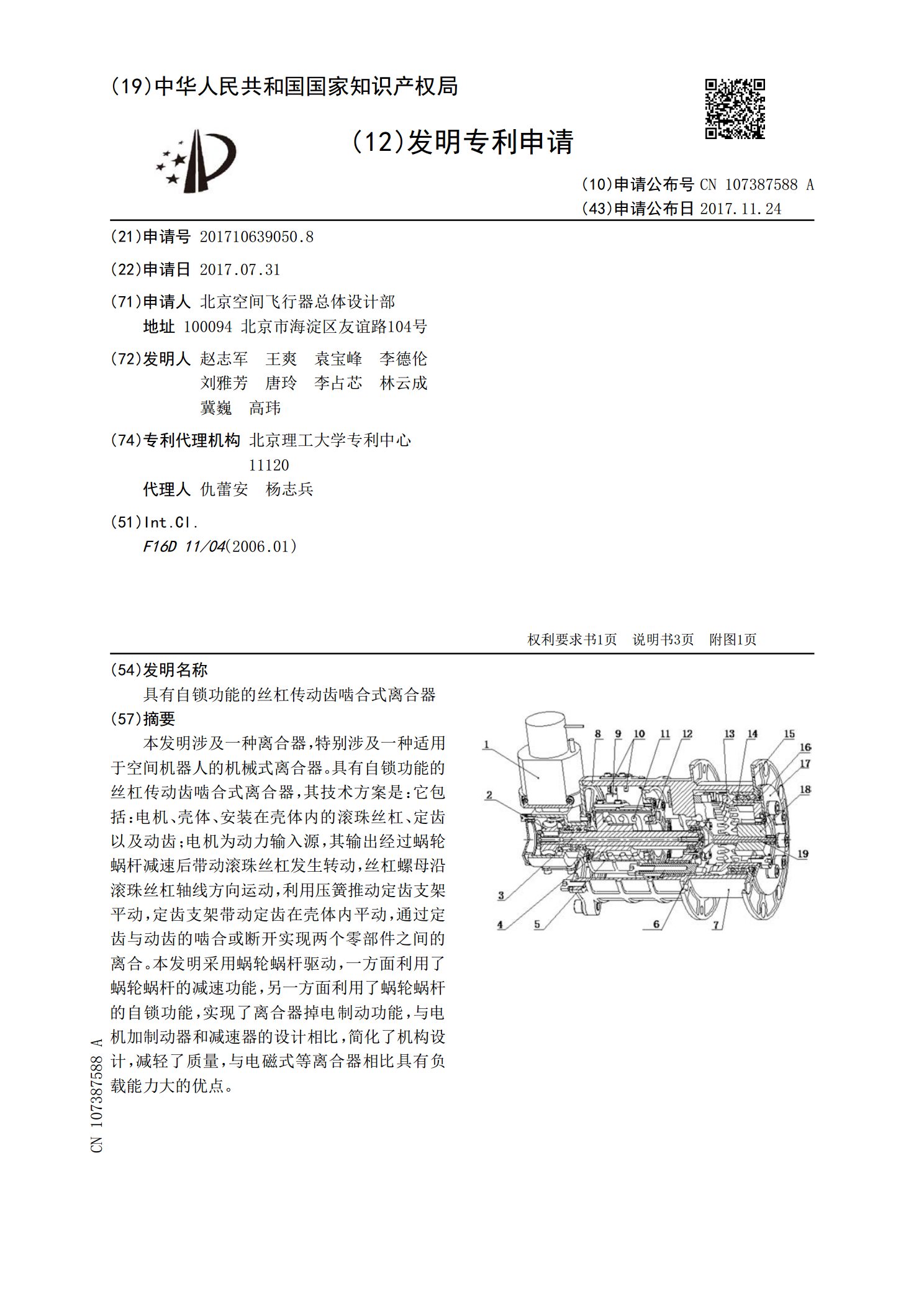
本发明涉及一种离合器,特别涉及一种适用于空间机器人的机械式离合器。具有自锁功能的丝杠传动齿啮合式离合器,其技术方案是:它包括:电机、壳体、安装在壳体内的滚珠丝杠、定齿以及动齿;电机为动力输入源,其输出经过蜗轮蜗杆减速后带动滚珠丝杠发生转动,丝杠螺母沿滚珠丝杠轴线方向运动,利用压簧推动定齿支架平动,定齿支架带动定齿在壳体内平动,通过定齿与动齿的啮合或断开实现两个零部件之间的离合。本发明采用蜗轮蜗杆驱动,一方面利用了蜗轮蜗杆的减速功能,另一方面利用了蜗轮蜗杆的自锁功能,实现了离合器掉电制动功能,与电机加制动器
一种具有双向自锁功能的行星滚柱丝杠.pdf
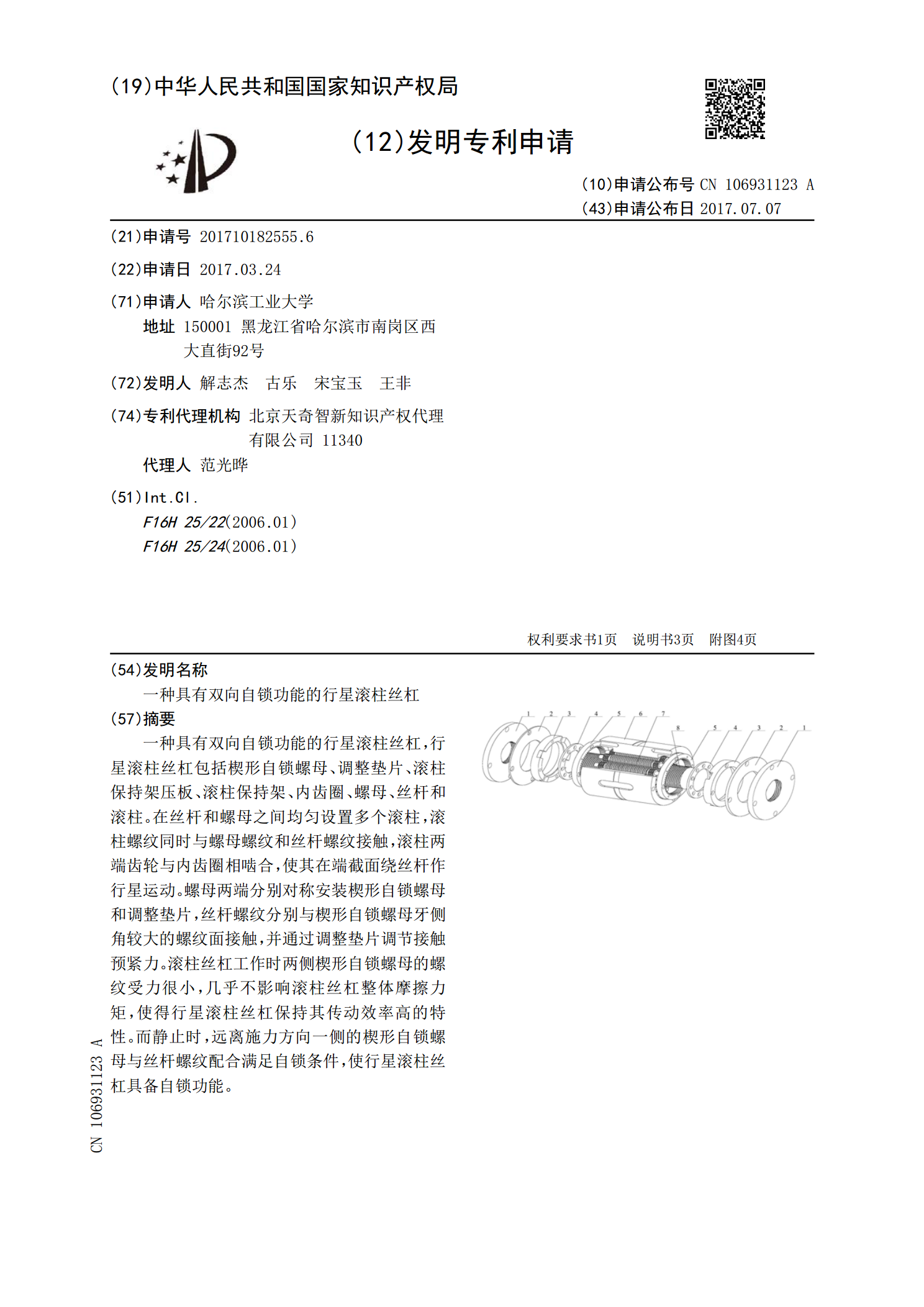
一种具有双向自锁功能的行星滚柱丝杠,行星滚柱丝杠包括楔形自锁螺母、调整垫片、滚柱保持架压板、滚柱保持架、内齿圈、螺母、丝杆和滚柱。在丝杆和螺母之间均匀设置多个滚柱,滚柱螺纹同时与螺母螺纹和丝杆螺纹接触,滚柱两端齿轮与内齿圈相啮合,使其在端截面绕丝杆作行星运动。螺母两端分别对称安装楔形自锁螺母和调整垫片,丝杆螺纹分别与楔形自锁螺母牙侧角较大的螺纹面接触,并通过调整垫片调节接触预紧力。滚柱丝杠工作时两侧楔形自锁螺母的螺纹受力很小,几乎不影响滚柱丝杠整体摩擦力矩,使得行星滚柱丝杠保持其传动效率高的特性。而静止时

具有螺旋锁止功能的钻具传动主动离合器.pdf
本发明提供一种具有螺旋锁止功能的钻具传动主动离合器,包括:马达总成;连接在马达总成下端的离合器总成,其包括:壳体,在壳体的内壁设有第一反向螺旋;设置在壳体内的滑动牙坎,在滑动牙坎的外壁设有第二反向螺旋,第二反向螺旋能够与第一反向螺旋适配;钻头连接轴;以及固定牙坎;第一状态下,马达总成带动滑动牙坎转动而驱动钻头转动,第二反向螺旋处于第一反向螺旋的上端而对滑动牙坎形成轴向向上的锁止,第二状态下,滑动牙坎与马达总成脱离而与固定牙坎适配啮合,通过设置于井口的转盘转动钻杆而驱动钻头转动,第二反向螺旋处于第一反向螺旋

一种细牙自锁型滚齿丝杠.pdf
本发明公开了一种细牙自锁型滚齿丝杠,包括丝杠外套、圆柱滚齿、滚齿保持架、定位导向座和丝杠,其中丝杠外套套在丝杠外部,在丝杠外套与丝杠之间设置滚齿保持架;所述滚齿保持架沿轴向设置若干圆柱滚齿,与丝杠外套的内螺纹和丝杠的外螺纹啮合,通过丝杠带动圆柱滚齿于丝杠外套内的螺纹上滚动;在滚齿保持架两端设置定位导向座,所述定位导向座与滚齿保持架的连接面为螺纹升面,保证圆柱滚齿的相对高度;所述丝杠外套内壁沿轴向还设置一齿返回槽,圆柱滚齿转至滚齿返回槽时,在滚齿返回槽内退回一个螺距,使得圆柱滚齿在一个螺距上往复旋转滚动。本

具有自锁功能的吊钩.pdf
本发明所述的具有自锁功能的吊钩,涉及一种起重设备配件。包括吊钩壳体、滑轮组、吊钩;换轮组及吊钩装于吊钩壳体的内部;其特征在于所述的吊钩包括吊钩A与吊钩B通过轴对称装于吊钩壳体内部的滑轮组下方;在吊钩壳体与吊钩A及吊钩B上部相对的位置装有弹簧支柱,在弹簧支柱上装有弹簧;吊钩A外侧靠近底部的位置加工有卡孔;吊钩B底部装有卡钩。弹簧与吊钩A与吊钩B接触的位置高于轴的位置。卡钩装于螺杆上,螺杆通过调节螺栓装于吊钩B上。本发明具有结构新颖、加工简便、使用方便、安全可靠等特点,故属于一种集经济性与实用性为一体的新型具