
一种新型的多关节手臂传动机构.pdf

Wi****m7

1/6
2/6
3/6
4/6
5/6
6/6
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料
一种新型的多关节手臂传动机构.pdf
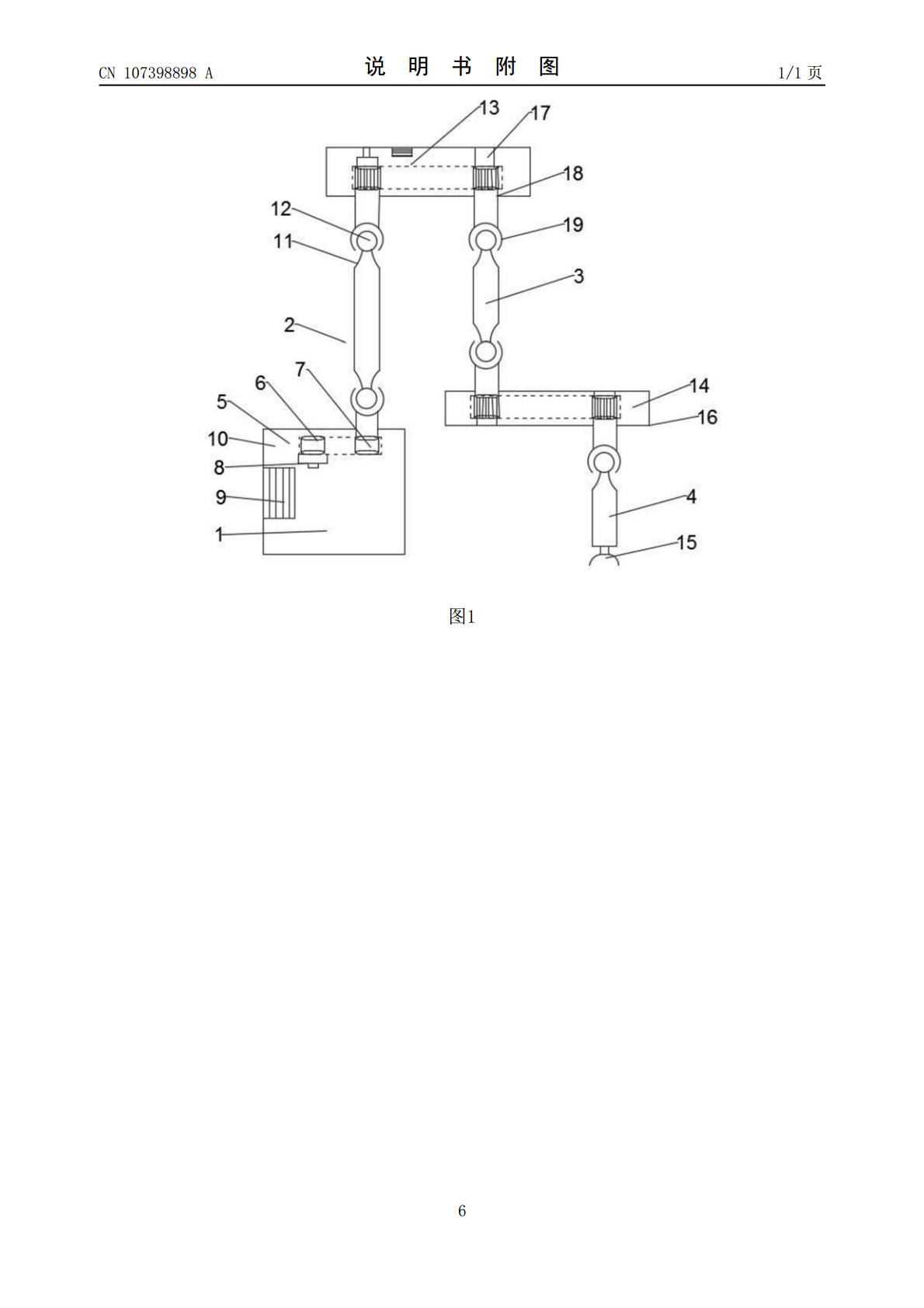
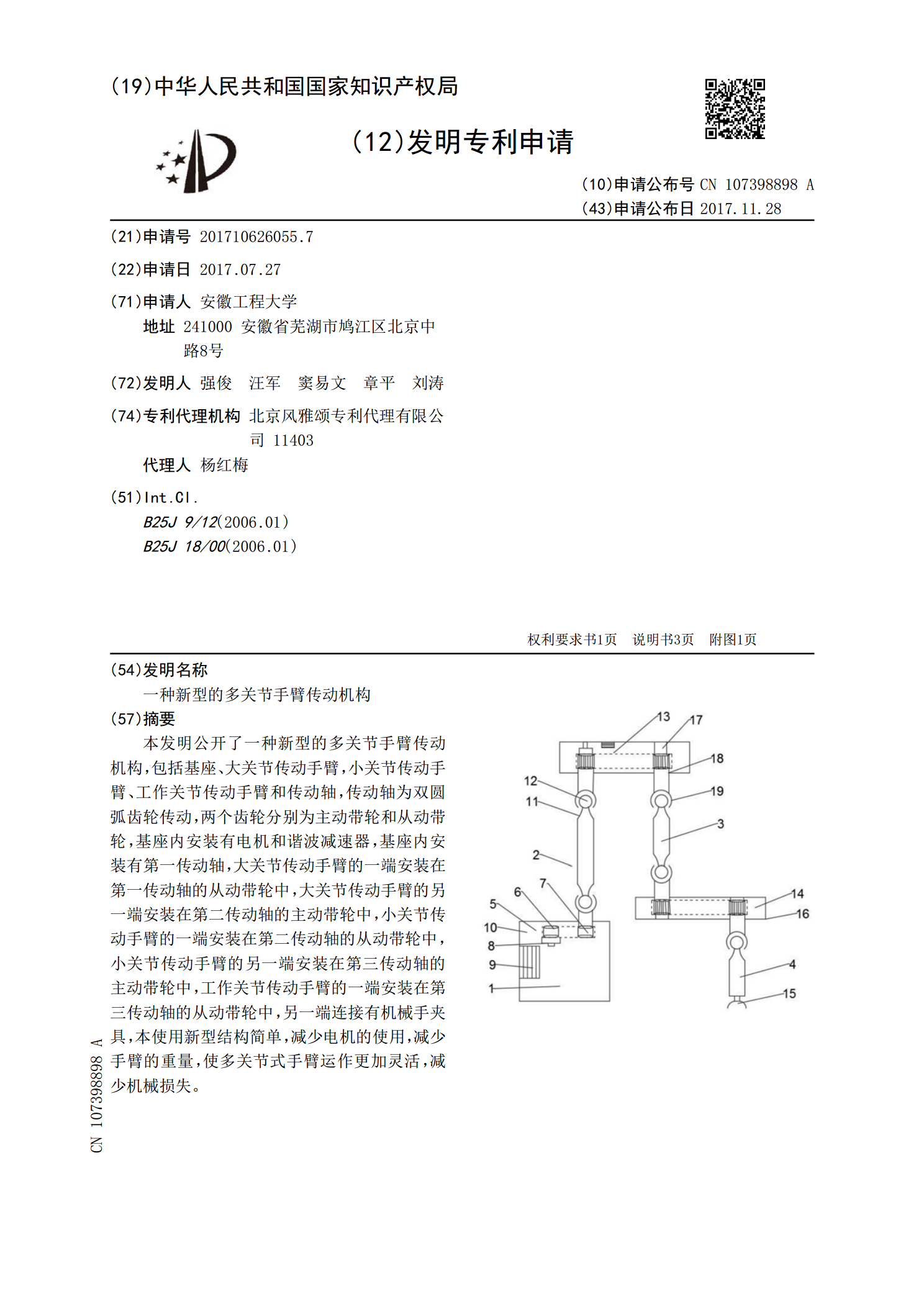
本发明公开了一种新型的多关节手臂传动机构,包括基座、大关节传动手臂,小关节传动手臂、工作关节传动手臂和传动轴,传动轴为双圆弧齿轮传动,两个齿轮分别为主动带轮和从动带轮,基座内安装有电机和谐波减速器,基座内安装有第一传动轴,大关节传动手臂的一端安装在第一传动轴的从动带轮中,大关节传动手臂的另一端安装在第二传动轴的主动带轮中,小关节传动手臂的一端安装在第二传动轴的从动带轮中,小关节传动手臂的另一端安装在第三传动轴的主动带轮中,工作关节传动手臂的一端安装在第三传动轴的从动带轮中,另一端连接有机械手夹具,本使用新
一种关节传动机构.pdf
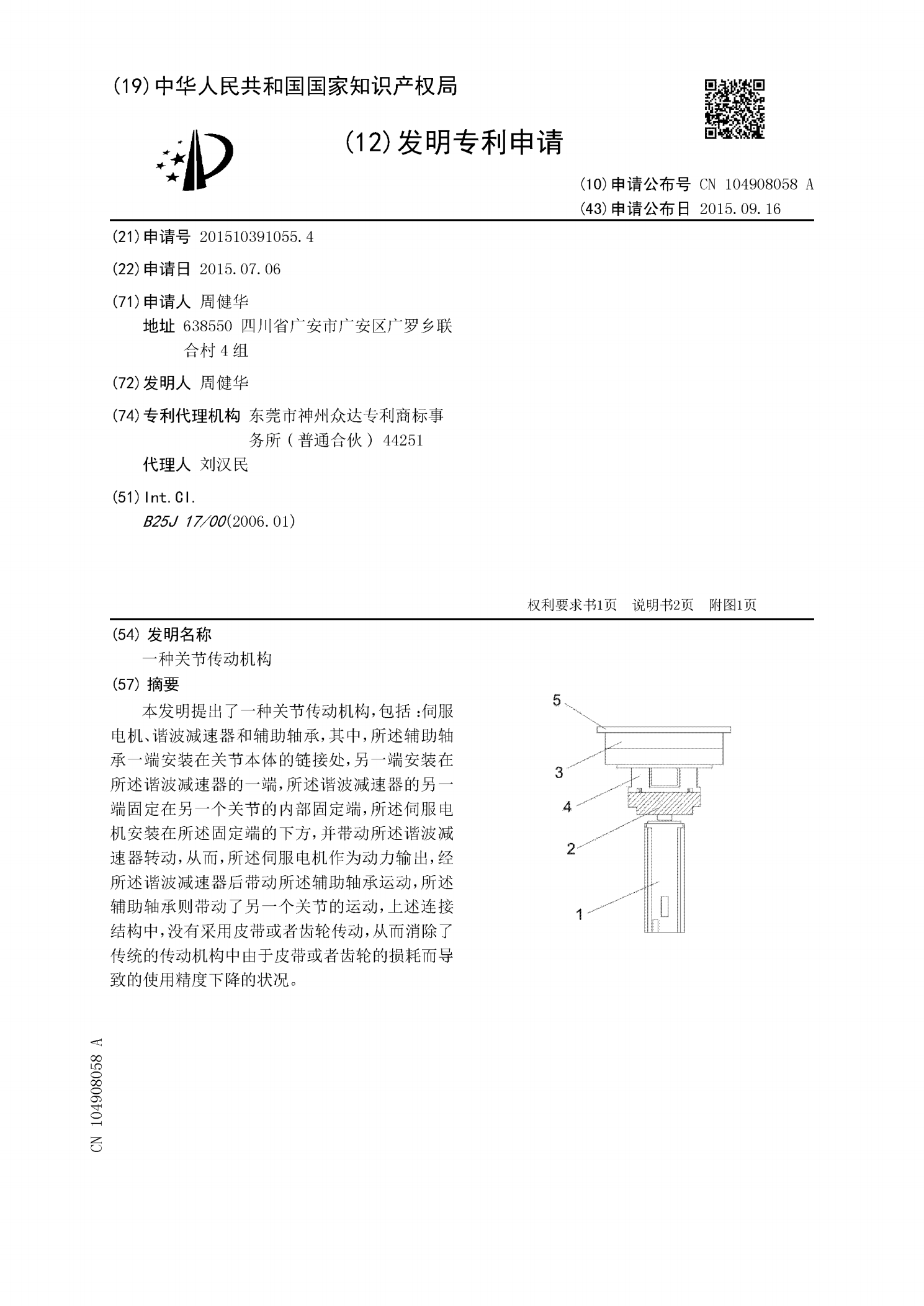
本发明提出了一种关节传动机构,包括:伺服电机、谐波减速器和辅助轴承,其中,所述辅助轴承一端安装在关节本体的链接处,另一端安装在所述谐波减速器的一端,所述谐波减速器的另一端固定在另一个关节的内部固定端,所述伺服电机安装在所述固定端的下方,并带动所述谐波减速器转动,从而,所述伺服电机作为动力输出,经所述谐波减速器后带动所述辅助轴承运动,所述辅助轴承则带动了另一个关节的运动,上述连接结构中,没有采用皮带或者齿轮传动,从而消除了传统的传动机构中由于皮带或者齿轮的损耗而导致的使用精度下降的状况。
一种新型传动机构.pdf
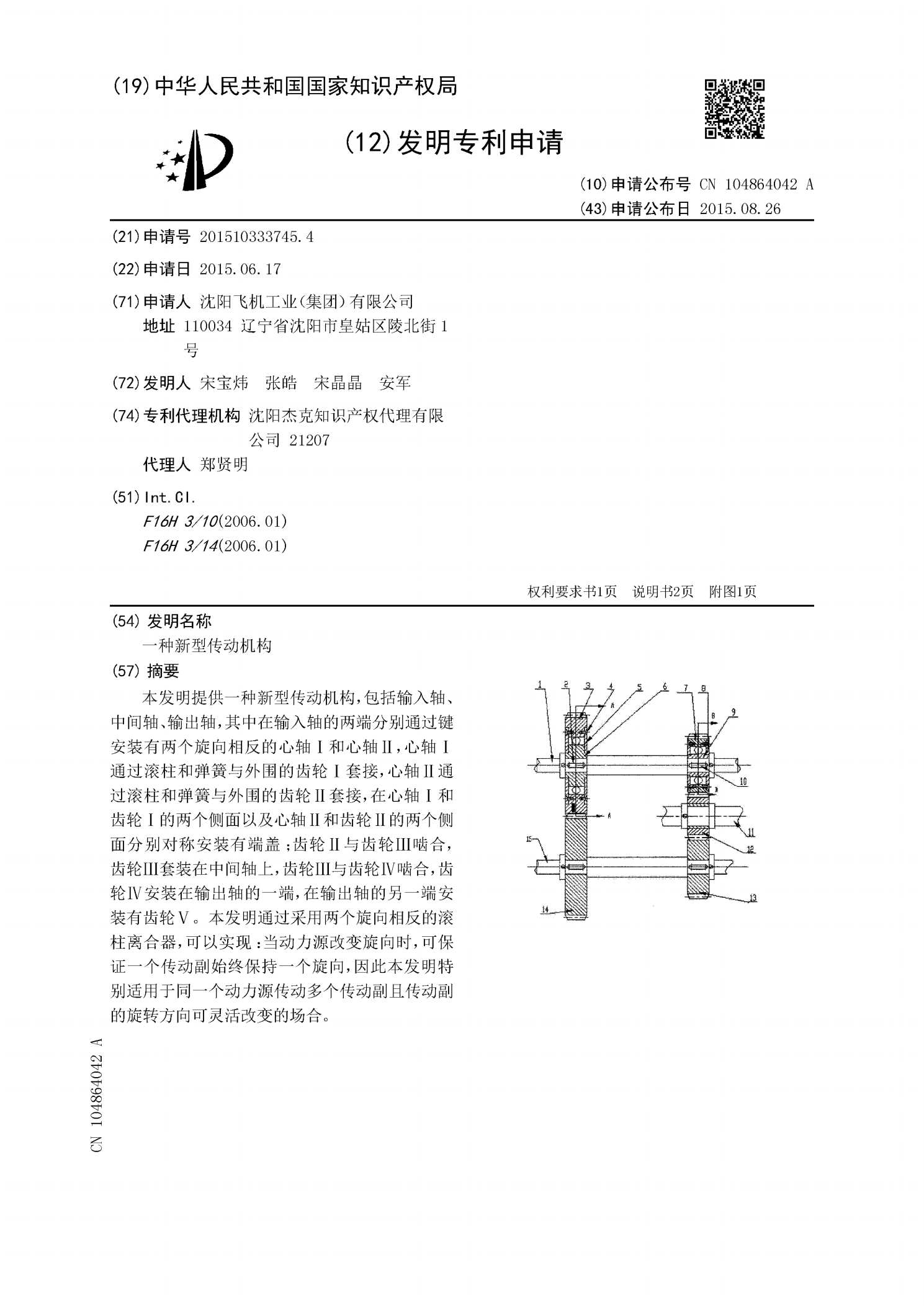
本发明提供一种新型传动机构,包括输入轴、中间轴、输出轴,其中在输入轴的两端分别通过键安装有两个旋向相反的心轴Ⅰ和心轴Ⅱ,心轴Ⅰ通过滚柱和弹簧与外围的齿轮Ⅰ套接,心轴Ⅱ通过滚柱和弹簧与外围的齿轮Ⅱ套接,在心轴Ⅰ和齿轮Ⅰ的两个侧面以及心轴Ⅱ和齿轮Ⅱ的两个侧面分别对称安装有端盖;齿轮Ⅱ与齿轮Ⅲ啮合,齿轮Ⅲ套装在中间轴上,齿轮Ⅲ与齿轮Ⅳ啮合,齿轮Ⅳ安装在输出轴的一端,在输出轴的另一端安装有齿轮Ⅴ。本发明通过采用两个旋向相反的滚柱离合器,可以实现:当动力源改变旋向时,可保证一个传动副始终保持一个旋向,因此本发明特别

一种新型传动机构.pdf
一种新型传动机构,它是在驱动体的大外圆上面均布地制造有内凹齿,驱动盘的两侧面用铆接的方式安装固定摩擦片,在驱动盘的中心部位制造有圆孔,在圆孔的内圆面上制造有与驱动体外圆上相似的凹凸齿,驱动盘通过其内圆上的凹凸齿卡合在驱动体外圆的内凹齿上,飞轮两侧分别制造有气缸与驱动盘室,驱动盘室面向驱动盘的方向,并用齿轴将飞轮安装固定在驱动体的小外圆上面,活塞安装在飞轮一侧气缸的口部,活塞与气缸之间分别采用气缸内密封圈与气缸外密封圈密封,拉杆的一端拧有调节螺母,旋转进气接头安装在驱动轴头部中心位置,进排气管分别与气缸的内

一种新型传动机构.pdf
本发明公开了一种新型传动机构,包括三级传动机构、输出端和电机,第一级传动机构包括一级主动轮、同步带和一级从动轮,第二级传动机构包括二级主动轮、平带和二级从动轮,第三级传动机构包括三级主动轮和三级从动轮,所述电机驱动一级主动轮,所述输出端安装在三级从动轮上,第一级传动机构采用同步带传动方式,第二级传动机构采用平带传动方式,第三级传动机构采用圆柱斜齿轮传动方式,本发明结构巧妙,通过三级传动机构实现通过电动云台的控制能让摄像机高精度、低噪声的运动。