
一种关节传动机构.pdf

努力****承悦

1/5
2/5
3/5

4/5
5/5
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料
一种关节传动机构.pdf
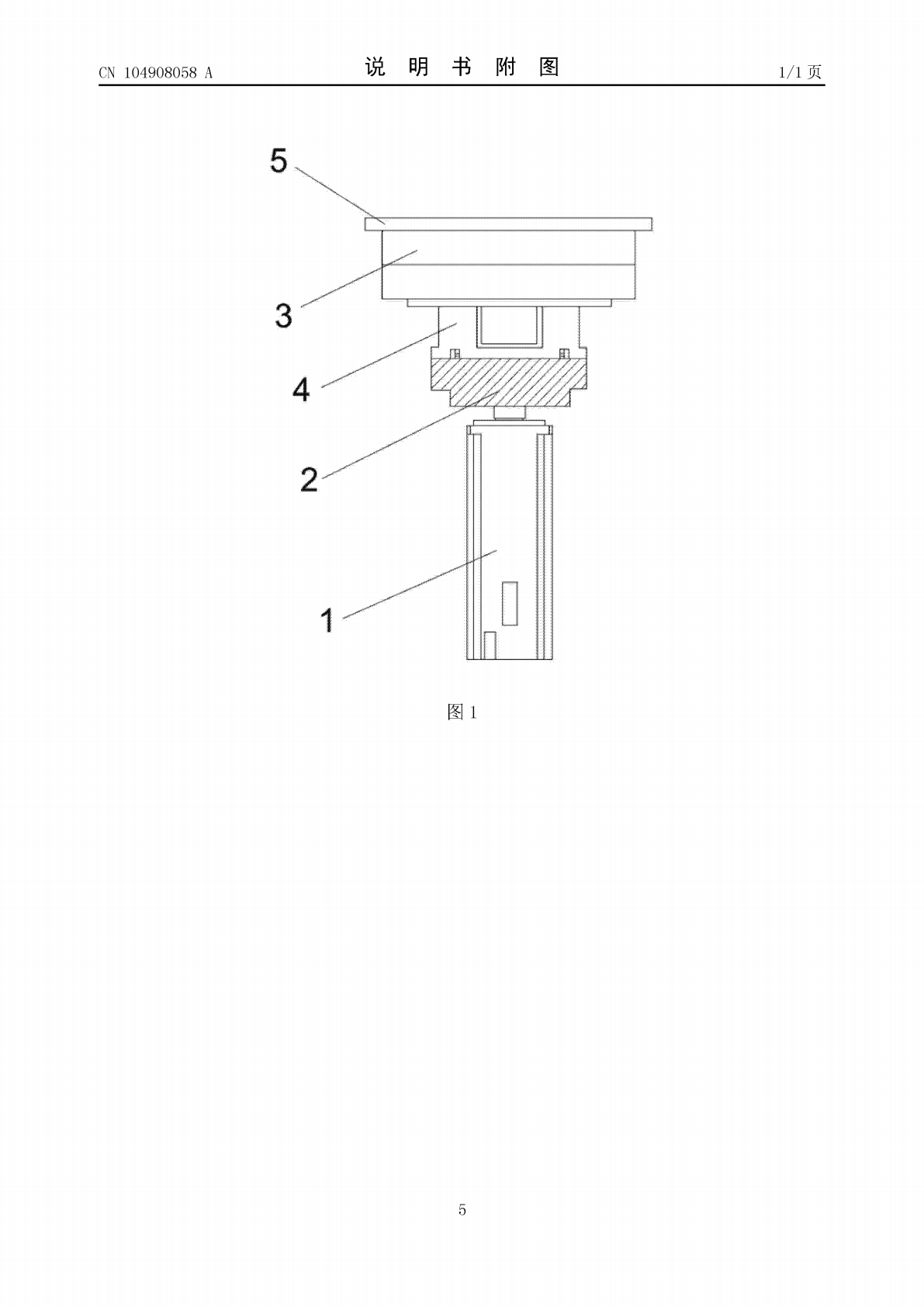
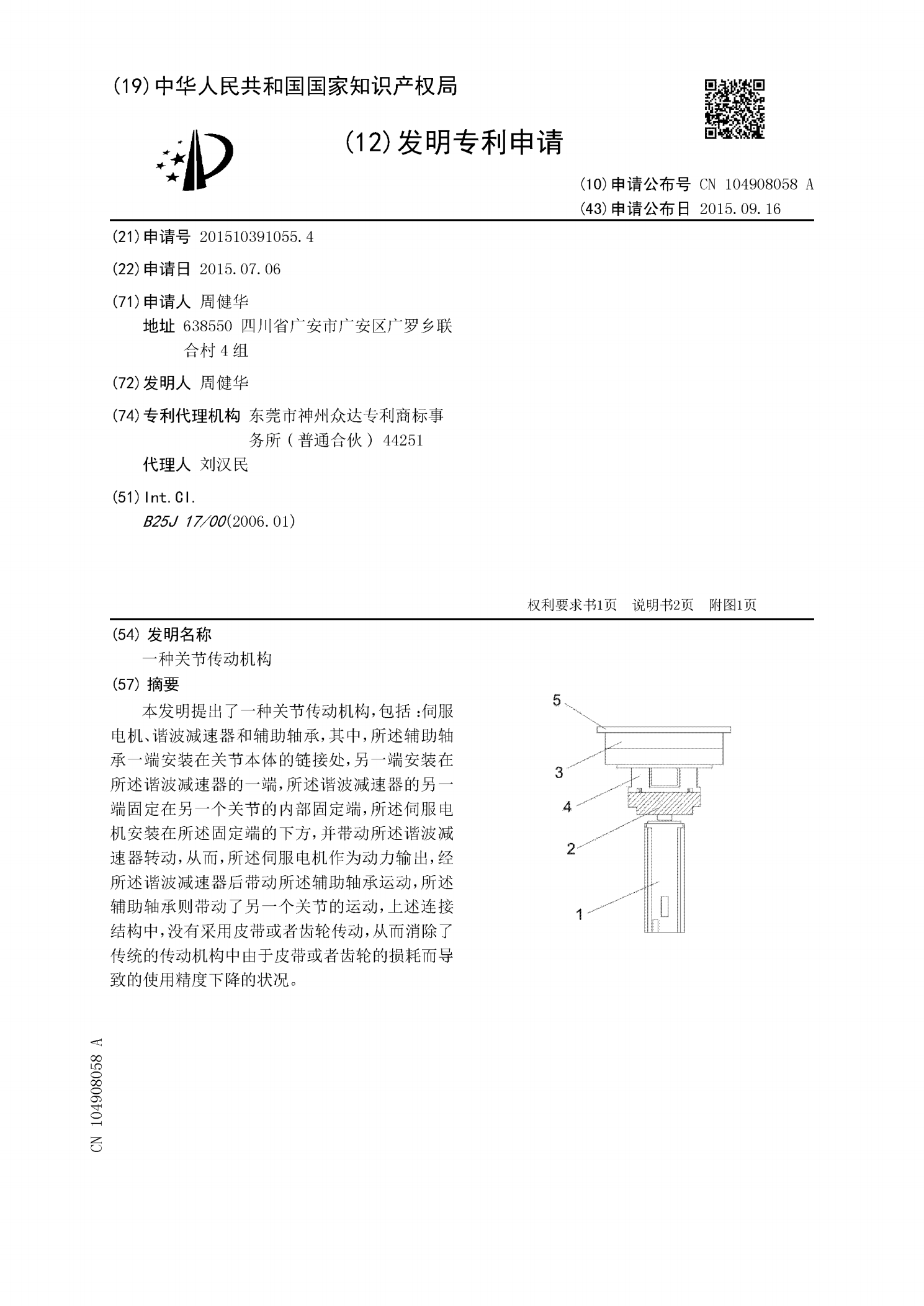
本发明提出了一种关节传动机构,包括:伺服电机、谐波减速器和辅助轴承,其中,所述辅助轴承一端安装在关节本体的链接处,另一端安装在所述谐波减速器的一端,所述谐波减速器的另一端固定在另一个关节的内部固定端,所述伺服电机安装在所述固定端的下方,并带动所述谐波减速器转动,从而,所述伺服电机作为动力输出,经所述谐波减速器后带动所述辅助轴承运动,所述辅助轴承则带动了另一个关节的运动,上述连接结构中,没有采用皮带或者齿轮传动,从而消除了传统的传动机构中由于皮带或者齿轮的损耗而导致的使用精度下降的状况。
一种关节无间隙齿轮传动机构.pdf
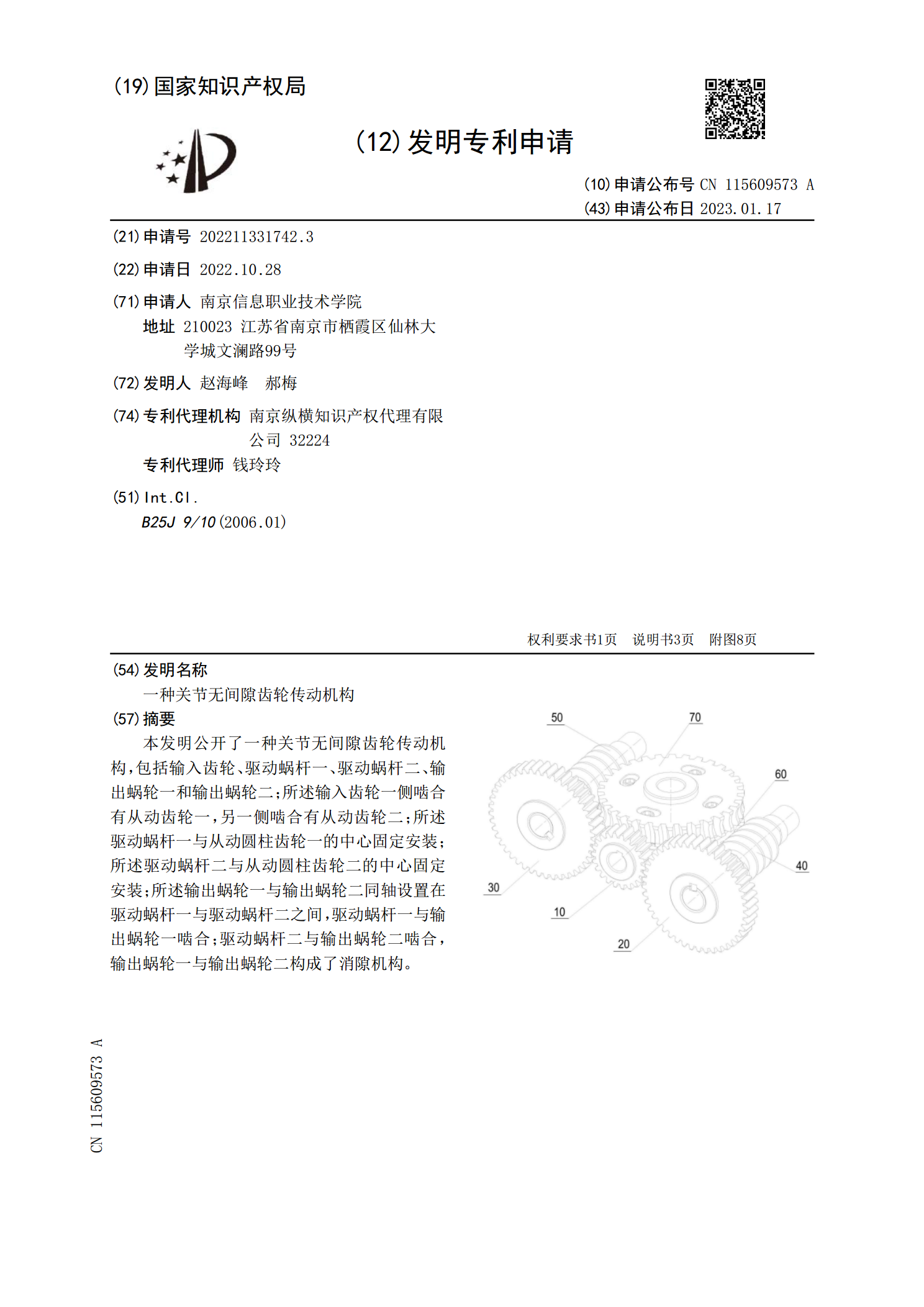
本发明公开了一种关节无间隙齿轮传动机构,包括输入齿轮、驱动蜗杆一、驱动蜗杆二、输出蜗轮一和输出蜗轮二;所述输入齿轮一侧啮合有从动齿轮一,另一侧啮合有从动齿轮二;所述驱动蜗杆一与从动圆柱齿轮一的中心固定安装;所述驱动蜗杆二与从动圆柱齿轮二的中心固定安装;所述输出蜗轮一与输出蜗轮二同轴设置在驱动蜗杆一与驱动蜗杆二之间,驱动蜗杆一与输出蜗轮一啮合;驱动蜗杆二与输出蜗轮二啮合,输出蜗轮一与输出蜗轮二构成了消隙机构。
一种新型的多关节手臂传动机构.pdf
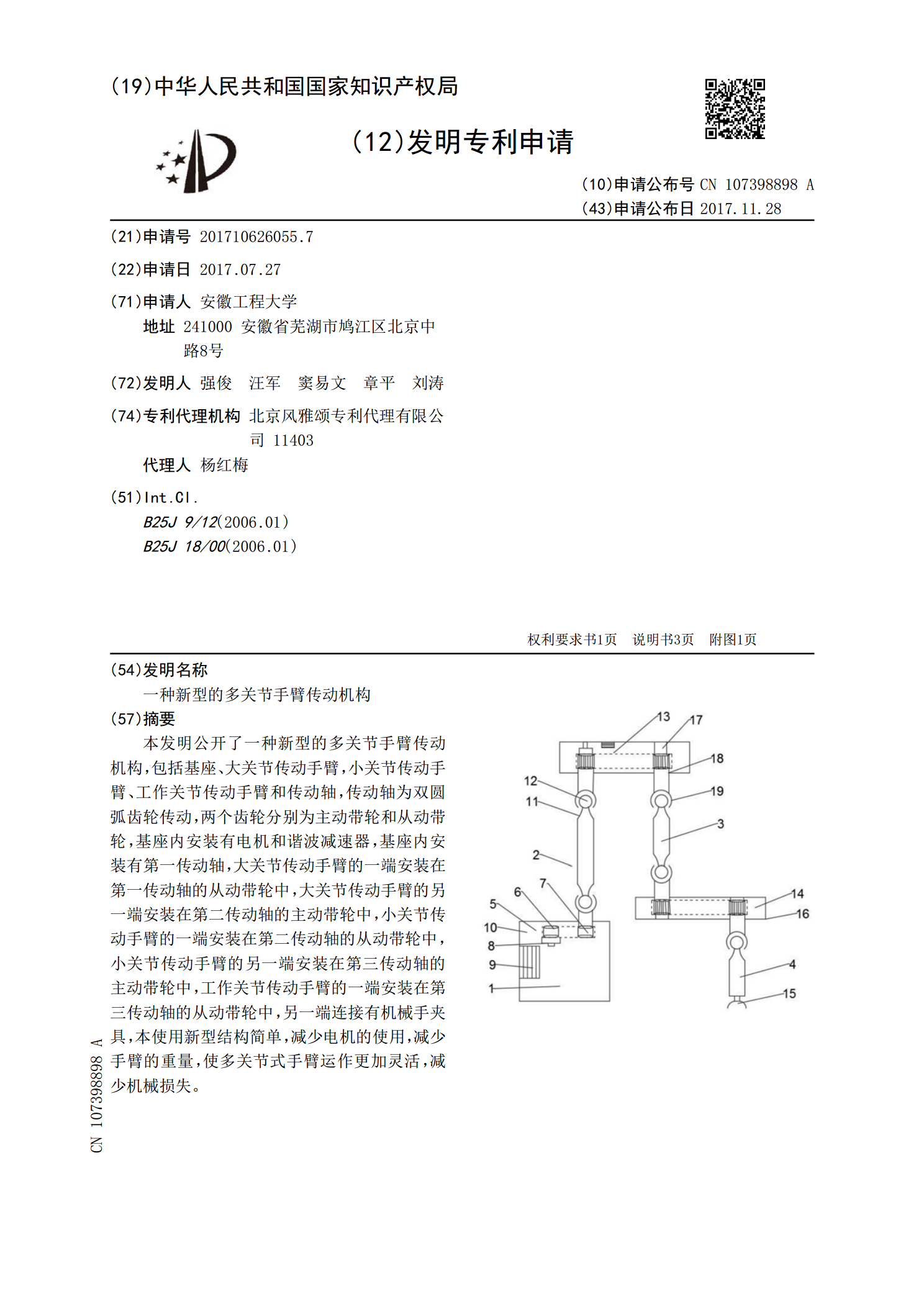
本发明公开了一种新型的多关节手臂传动机构,包括基座、大关节传动手臂,小关节传动手臂、工作关节传动手臂和传动轴,传动轴为双圆弧齿轮传动,两个齿轮分别为主动带轮和从动带轮,基座内安装有电机和谐波减速器,基座内安装有第一传动轴,大关节传动手臂的一端安装在第一传动轴的从动带轮中,大关节传动手臂的另一端安装在第二传动轴的主动带轮中,小关节传动手臂的一端安装在第二传动轴的从动带轮中,小关节传动手臂的另一端安装在第三传动轴的主动带轮中,工作关节传动手臂的一端安装在第三传动轴的从动带轮中,另一端连接有机械手夹具,本使用新

一种关节无间隙蜗杆传动机构.pdf
本发明公开了一种关节无间隙蜗杆传动机构,包括:输入蜗杆,所述输入蜗杆一侧啮合有输入蜗轮一,另一侧啮合有输入蜗轮二,所述输入蜗轮一中心安装有驱动蜗杆一,所述输入蜗轮二的中心安装有驱动蜗杆二;所述驱动蜗杆一与驱动蜗杆二之间至少设有一个输出蜗轮一,所述驱动蜗杆一与驱动蜗杆二与输出蜗轮一啮合,所述输入蜗轮二与所述驱动蜗杆二构成了消隙机构,本发明利用消隙机构消除传动链中的反转传动间隙,传动原理简单、速比大、体积小、承载能力更高、加工简单、成本低。
一种关节机器人用传动机构.pdf
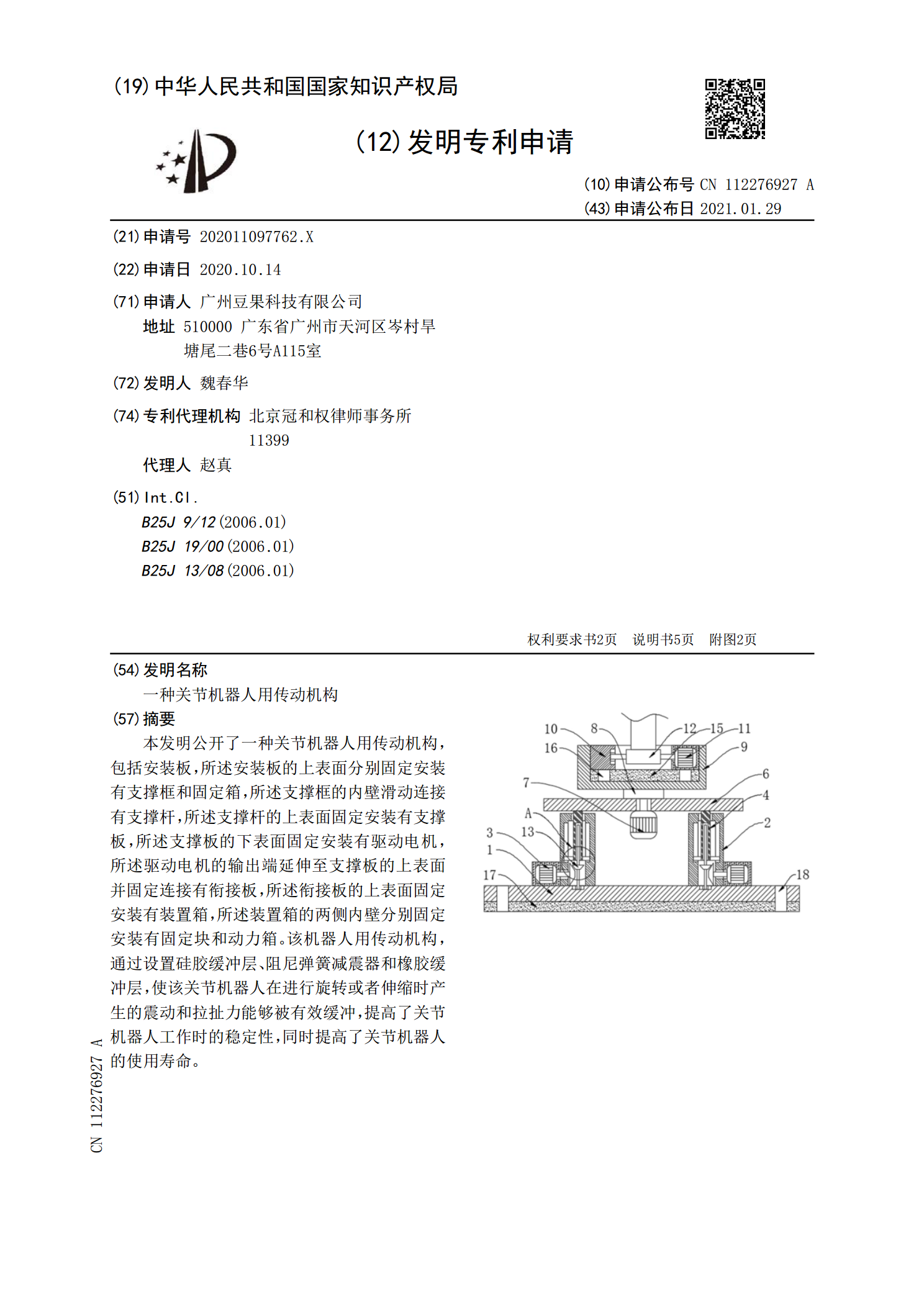
本发明公开了一种关节机器人用传动机构,包括安装板,所述安装板的上表面分别固定安装有支撑框和固定箱,所述支撑框的内壁滑动连接有支撑杆,所述支撑杆的上表面固定安装有支撑板,所述支撑板的下表面固定安装有驱动电机,所述驱动电机的输出端延伸至支撑板的上表面并固定连接有衔接板,所述衔接板的上表面固定安装有装置箱,所述装置箱的两侧内壁分别固定安装有固定块和动力箱。该机器人用传动机构,通过设置硅胶缓冲层、阻尼弹簧减震器和橡胶缓冲层,使该关节机器人在进行旋转或者伸缩时产生的震动和拉扯力能够被有效缓冲,提高了关节机器人工作时