
一种基于多级变胞机构的仿生柔顺抓取机械手.pdf

含秀****66


1/10
2/10

3/10

4/10

5/10

6/10

7/10

8/10
9/10

10/10
亲,该文档总共15页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
一种基于多级变胞机构的仿生柔顺抓取机械手.pdf
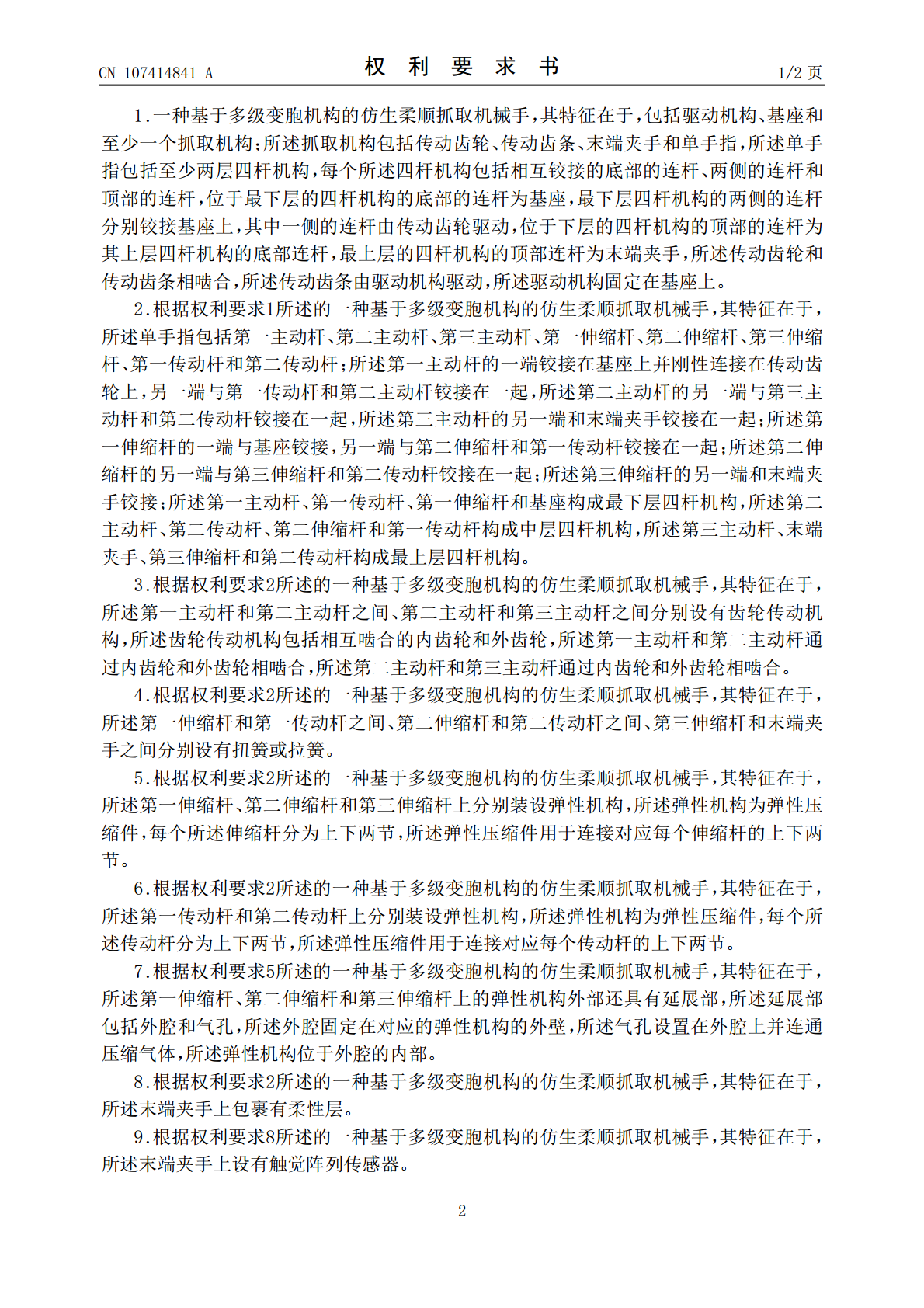
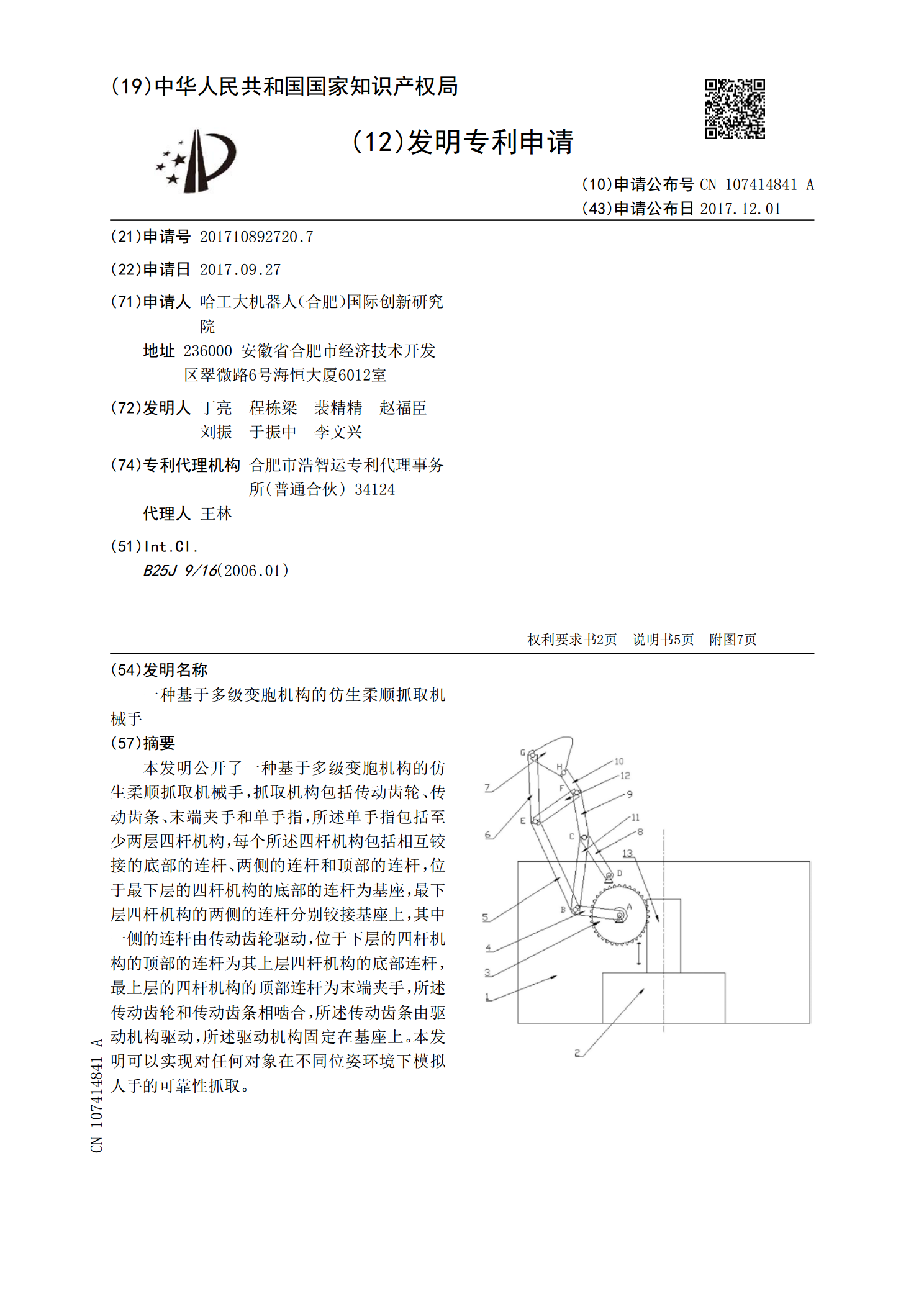
本发明公开了一种基于多级变胞机构的仿生柔顺抓取机械手,抓取机构包括传动齿轮、传动齿条、末端夹手和单手指,所述单手指包括至少两层四杆机构,每个所述四杆机构包括相互铰接的底部的连杆、两侧的连杆和顶部的连杆,位于最下层的四杆机构的底部的连杆为基座,最下层四杆机构的两侧的连杆分别铰接基座上,其中一侧的连杆由传动齿轮驱动,位于下层的四杆机构的顶部的连杆为其上层四杆机构的底部连杆,最上层的四杆机构的顶部连杆为末端夹手,所述传动齿轮和传动齿条相啮合,所述传动齿条由驱动机构驱动,所述驱动机构固定在基座上。本发明可以实现对

一种柔顺机械手及其抓取作业方法.pdf
本发明公开了一种柔顺机械手及其抓取作业方法,包括壳体,所述壳体内部安装有运动控制模块,所述运动控制模块电性连接有驱动单元,所述驱动单元动力连接有传动模块,所述传动模块包括底板,所述底板上贯穿安装有传动轴,所述传动轴一端与所述驱动单元动力连接,所述传动轴上通过轴承安装有力矩调整大齿轮,所述力矩调整大齿轮啮合连接有力矩调整小齿轮,所述力矩调整小齿轮与所述驱动单元动力连接,所述传动轴一端伸出所述壳体动力连接有手爪,为手爪抓取物体提供动力。能够在不改变电机驱动参数的前提下,根据夹持力与力矩调整电机的微定位转角之间
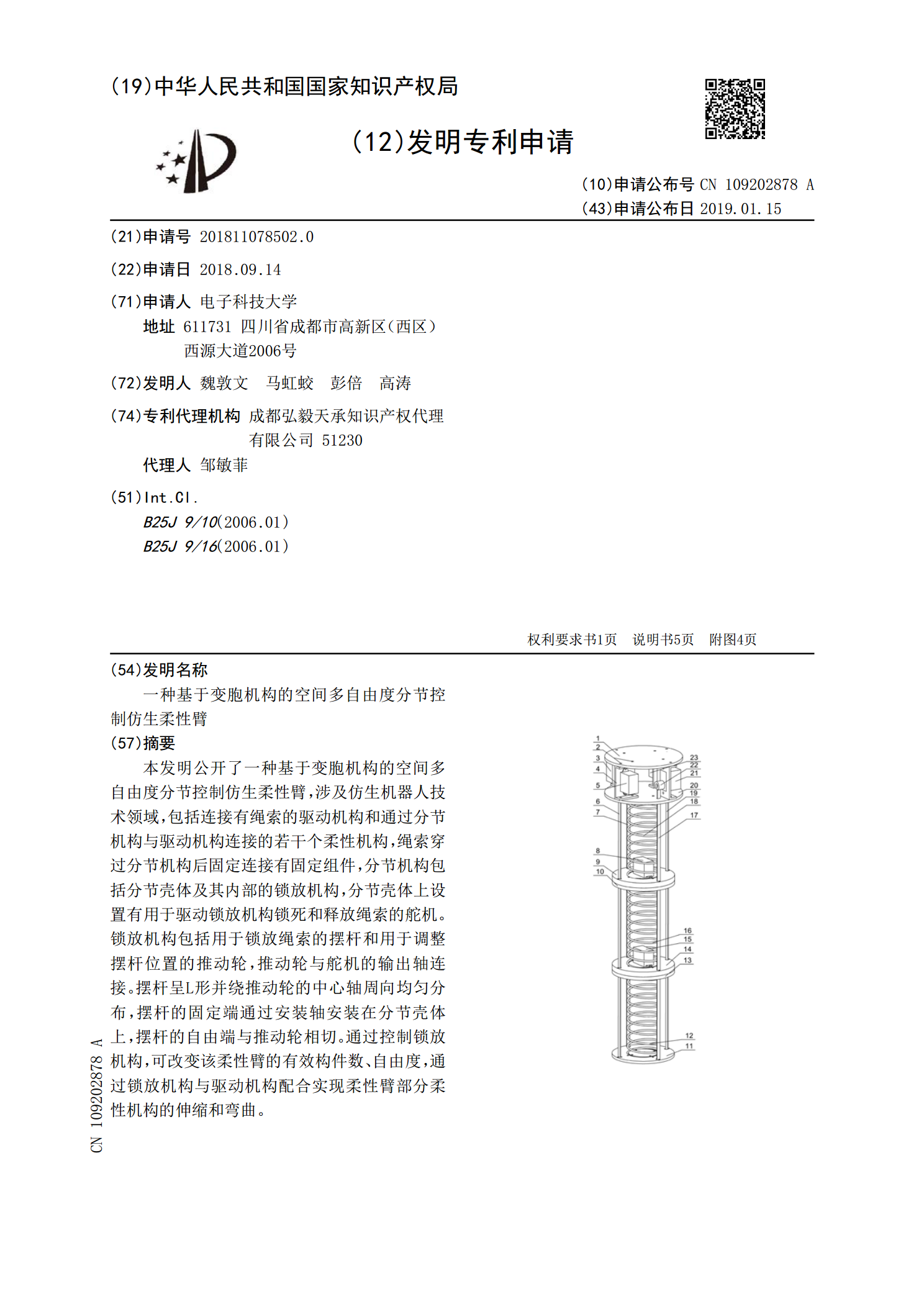
一种基于变胞机构的空间多自由度分节控制仿生柔性臂.pdf
本发明公开了一种基于变胞机构的空间多自由度分节控制仿生柔性臂,涉及仿生机器人技术领域,包括连接有绳索的驱动机构和通过分节机构与驱动机构连接的若干个柔性机构,绳索穿过分节机构后固定连接有固定组件,分节机构包括分节壳体及其内部的锁放机构,分节壳体上设置有用于驱动锁放机构锁死和释放绳索的舵机。锁放机构包括用于锁放绳索的摆杆和用于调整摆杆位置的推动轮,推动轮与舵机的输出轴连接。摆杆呈L形并绕推动轮的中心轴周向均匀分布,摆杆的固定端通过安装轴安装在分节壳体上,摆杆的自由端与推动轮相切。通过控制锁放机构,可改变该柔性
基于变胞机构的多功能六足仿生机器人.pdf
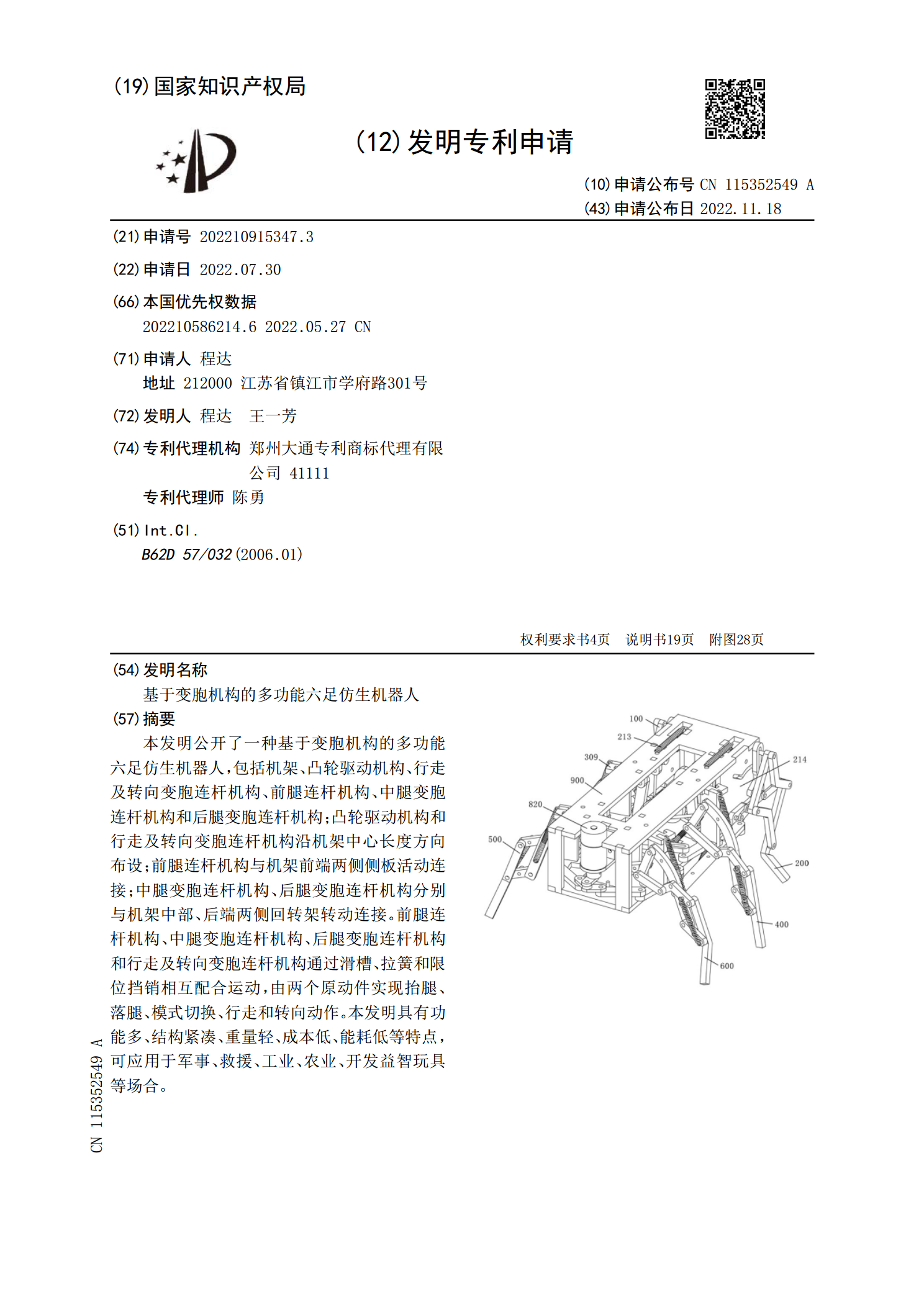
本发明公开了一种基于变胞机构的多功能六足仿生机器人,包括机架、凸轮驱动机构、行走及转向变胞连杆机构、前腿连杆机构、中腿变胞连杆机构和后腿变胞连杆机构;凸轮驱动机构和行走及转向变胞连杆机构沿机架中心长度方向布设;前腿连杆机构与机架前端两侧侧板活动连接;中腿变胞连杆机构、后腿变胞连杆机构分别与机架中部、后端两侧回转架转动连接。前腿连杆机构、中腿变胞连杆机构、后腿变胞连杆机构和行走及转向变胞连杆机构通过滑槽、拉簧和限位挡销相互配合运动,由两个原动件实现抬腿、落腿、模式切换、行走和转向动作。本发明具有功能多、结构

一种柔顺机械手抓取分析与结构优化的开题报告.docx
一种柔顺机械手抓取分析与结构优化的开题报告摘要:本文针对柔顺机械手抓取问题,开展了分析与结构优化研究,采用了基于仿生学的设计思路,并通过数学模型进行优化设计。结果表明,在保证结构强度和稳定性的前提下,优化设计后的柔顺机械手能够更加灵活、快速地完成物体的抓取,具有较高的应用价值。关键词:柔顺机械手、抓取分析、结构优化、仿生学、数学模型一、研究背景随着机器人技术的不断发展,机器人在工业、医疗、服务业等领域的应用越来越广泛。在机器人应用中,机械手作为机器人的重要部分,其抓取能力直接影响机器人的灵活性和适应性。柔