
一种柔顺机械手及其抓取作业方法.pdf

小代****回来


1/10

2/10

3/10

4/10
5/10

6/10

7/10

8/10
9/10

10/10
亲,该文档总共18页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

一种柔顺机械手及其抓取作业方法.pdf
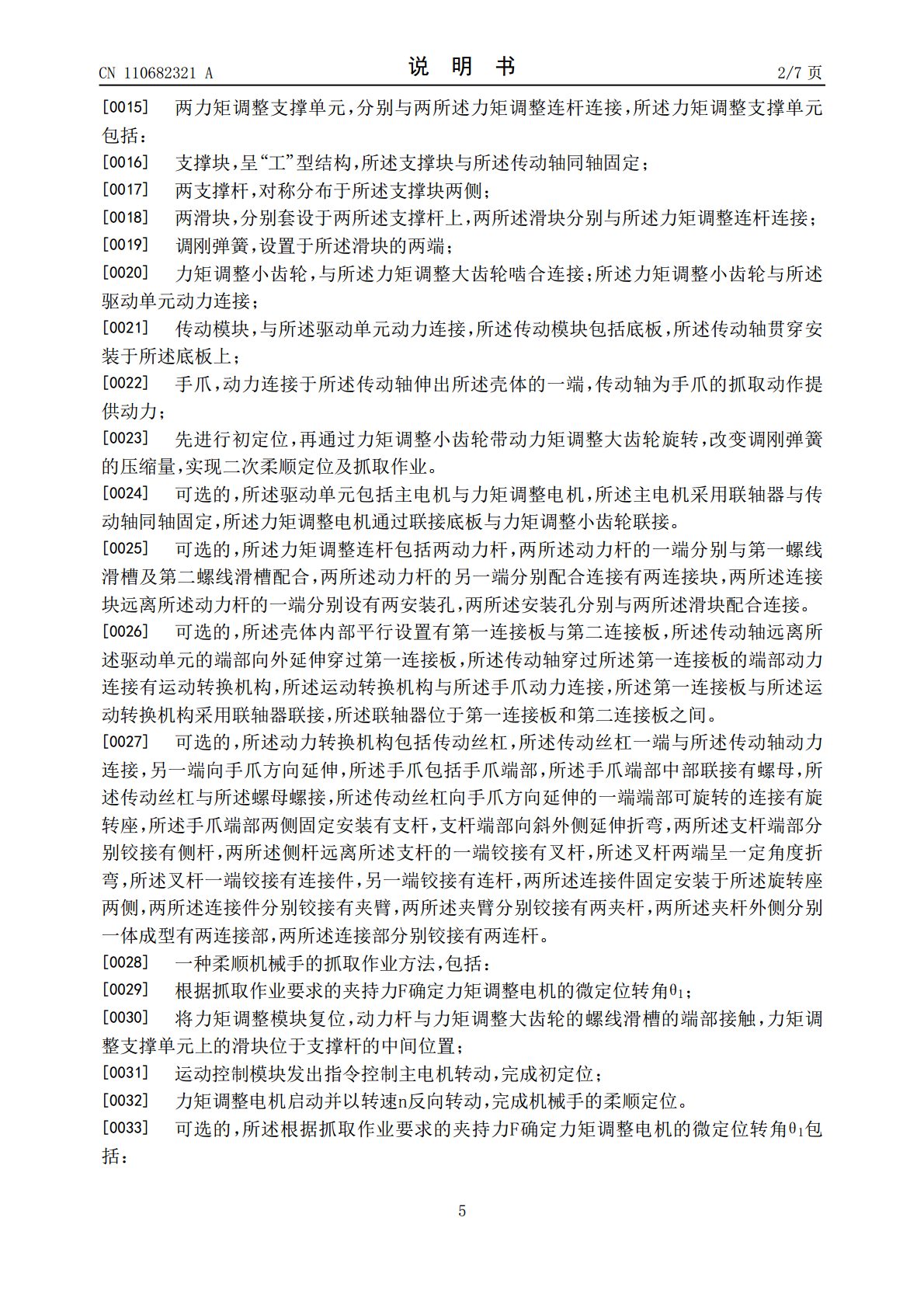
本发明公开了一种柔顺机械手及其抓取作业方法,包括壳体,所述壳体内部安装有运动控制模块,所述运动控制模块电性连接有驱动单元,所述驱动单元动力连接有传动模块,所述传动模块包括底板,所述底板上贯穿安装有传动轴,所述传动轴一端与所述驱动单元动力连接,所述传动轴上通过轴承安装有力矩调整大齿轮,所述力矩调整大齿轮啮合连接有力矩调整小齿轮,所述力矩调整小齿轮与所述驱动单元动力连接,所述传动轴一端伸出所述壳体动力连接有手爪,为手爪抓取物体提供动力。能够在不改变电机驱动参数的前提下,根据夹持力与力矩调整电机的微定位转角之间
具有两级柔顺动力传递的机械手及其抓取方法.pdf
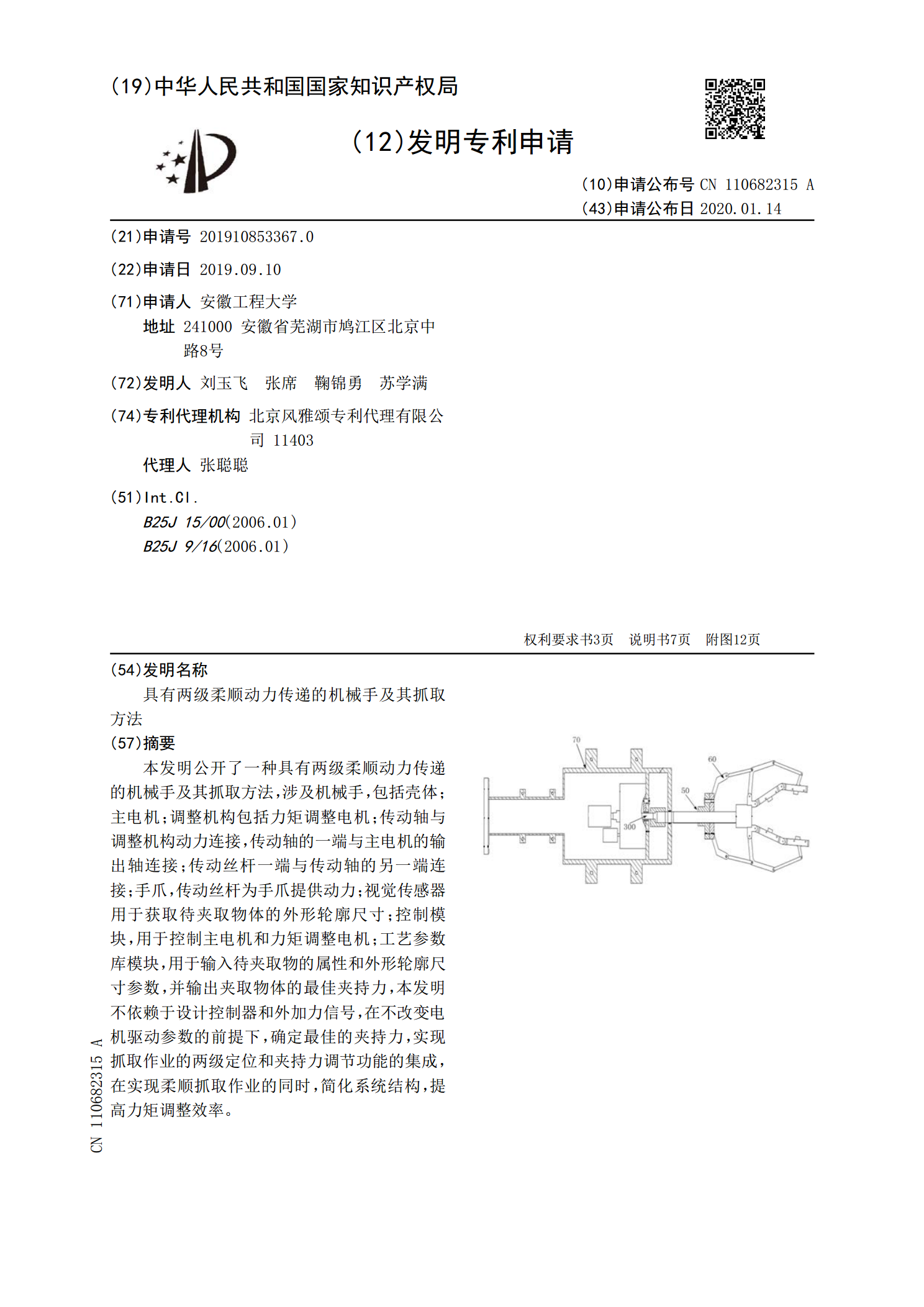
本发明公开了一种具有两级柔顺动力传递的机械手及其抓取方法,涉及机械手,包括壳体;主电机;调整机构包括力矩调整电机;传动轴与调整机构动力连接,传动轴的一端与主电机的输出轴连接;传动丝杆一端与传动轴的另一端连接;手爪,传动丝杆为手爪提供动力;视觉传感器用于获取待夹取物体的外形轮廓尺寸;控制模块,用于控制主电机和力矩调整电机;工艺参数库模块,用于输入待夹取物的属性和外形轮廓尺寸参数,并输出夹取物体的最佳夹持力,本发明不依赖于设计控制器和外加力信号,在不改变电机驱动参数的前提下,确定最佳的夹持力,实现抓取作业的两

一种柔顺机械手抓取分析与结构优化的开题报告.docx
一种柔顺机械手抓取分析与结构优化的开题报告摘要:本文针对柔顺机械手抓取问题,开展了分析与结构优化研究,采用了基于仿生学的设计思路,并通过数学模型进行优化设计。结果表明,在保证结构强度和稳定性的前提下,优化设计后的柔顺机械手能够更加灵活、快速地完成物体的抓取,具有较高的应用价值。关键词:柔顺机械手、抓取分析、结构优化、仿生学、数学模型一、研究背景随着机器人技术的不断发展,机器人在工业、医疗、服务业等领域的应用越来越广泛。在机器人应用中,机械手作为机器人的重要部分,其抓取能力直接影响机器人的灵活性和适应性。柔
一种基于多级变胞机构的仿生柔顺抓取机械手.pdf
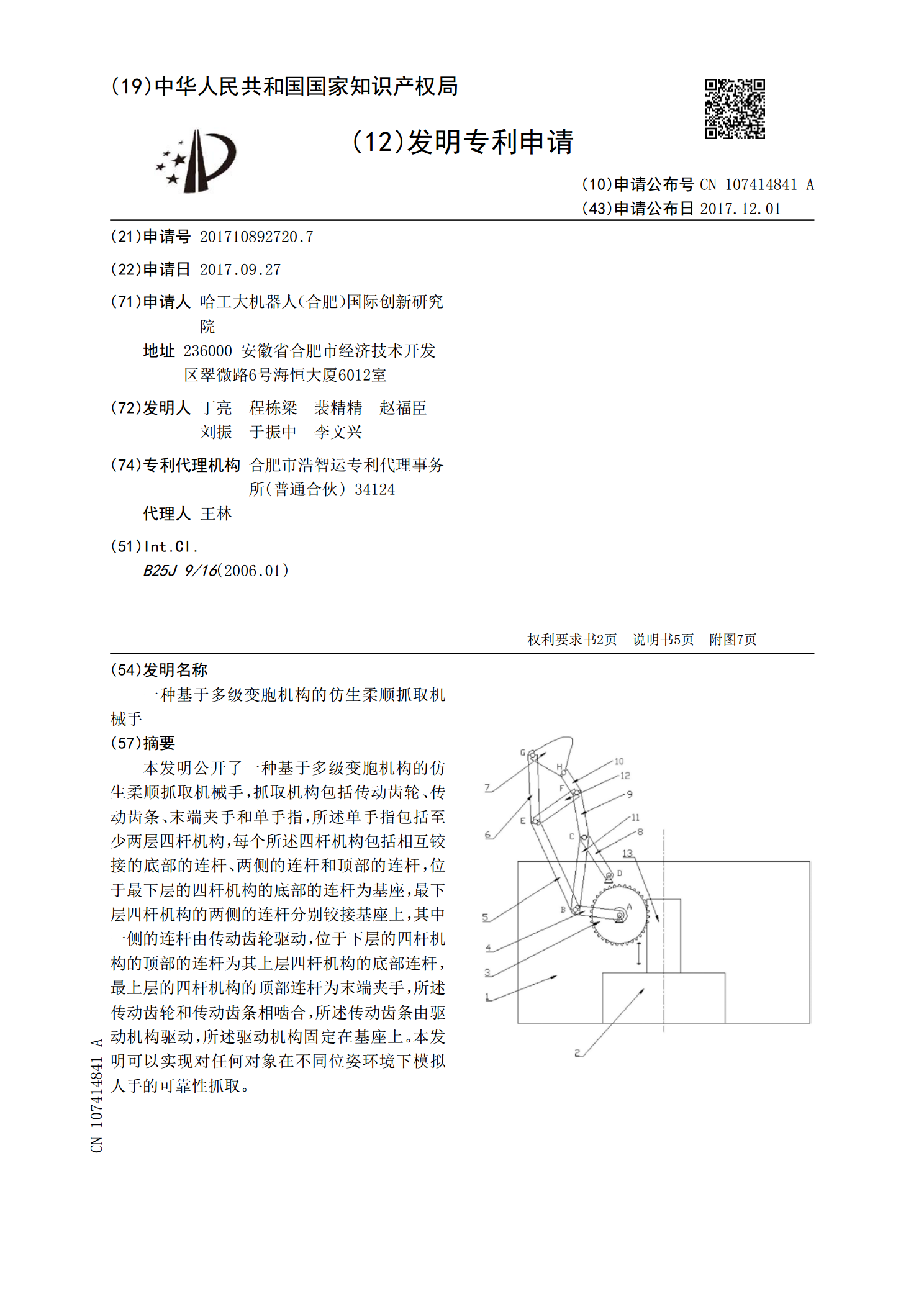
本发明公开了一种基于多级变胞机构的仿生柔顺抓取机械手,抓取机构包括传动齿轮、传动齿条、末端夹手和单手指,所述单手指包括至少两层四杆机构,每个所述四杆机构包括相互铰接的底部的连杆、两侧的连杆和顶部的连杆,位于最下层的四杆机构的底部的连杆为基座,最下层四杆机构的两侧的连杆分别铰接基座上,其中一侧的连杆由传动齿轮驱动,位于下层的四杆机构的顶部的连杆为其上层四杆机构的底部连杆,最上层的四杆机构的顶部连杆为末端夹手,所述传动齿轮和传动齿条相啮合,所述传动齿条由驱动机构驱动,所述驱动机构固定在基座上。本发明可以实现对
一种柔顺磨抛作业系统及其作业方法.pdf
本发明公开了一种柔顺磨抛作业系统,属于机械制造加工领域,包括刚性连接杆,刚性连接杆的末端固接有弹性连接杆,弹性连接杆的末端安装磨抛头,刚性连接杆上安装有用于检测转向、转速和转矩信号的检测装置,弹性连接杆上安装有压电传感器和压电致动器。本发明还公开了一种柔顺磨抛作业系统的作业方法。本发明集成了结构的高刚性和柔顺性的双重优点,使系统兼具高刚性和柔顺性,采用弹性连接杆能够抑制作业过程中的振动,提高磨抛作业的效率、可靠性和质量一致性。另外,本发明能够根据系统工况的变化,通过压电驱动对驱动电机和支撑架的位置进行微调