
辅助装置及辅助方法.pdf

一只****懿呀

1/10
2/10

3/10

4/10

5/10

6/10
7/10

8/10

9/10

10/10
亲,该文档总共19页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
辅助装置及辅助方法.pdf
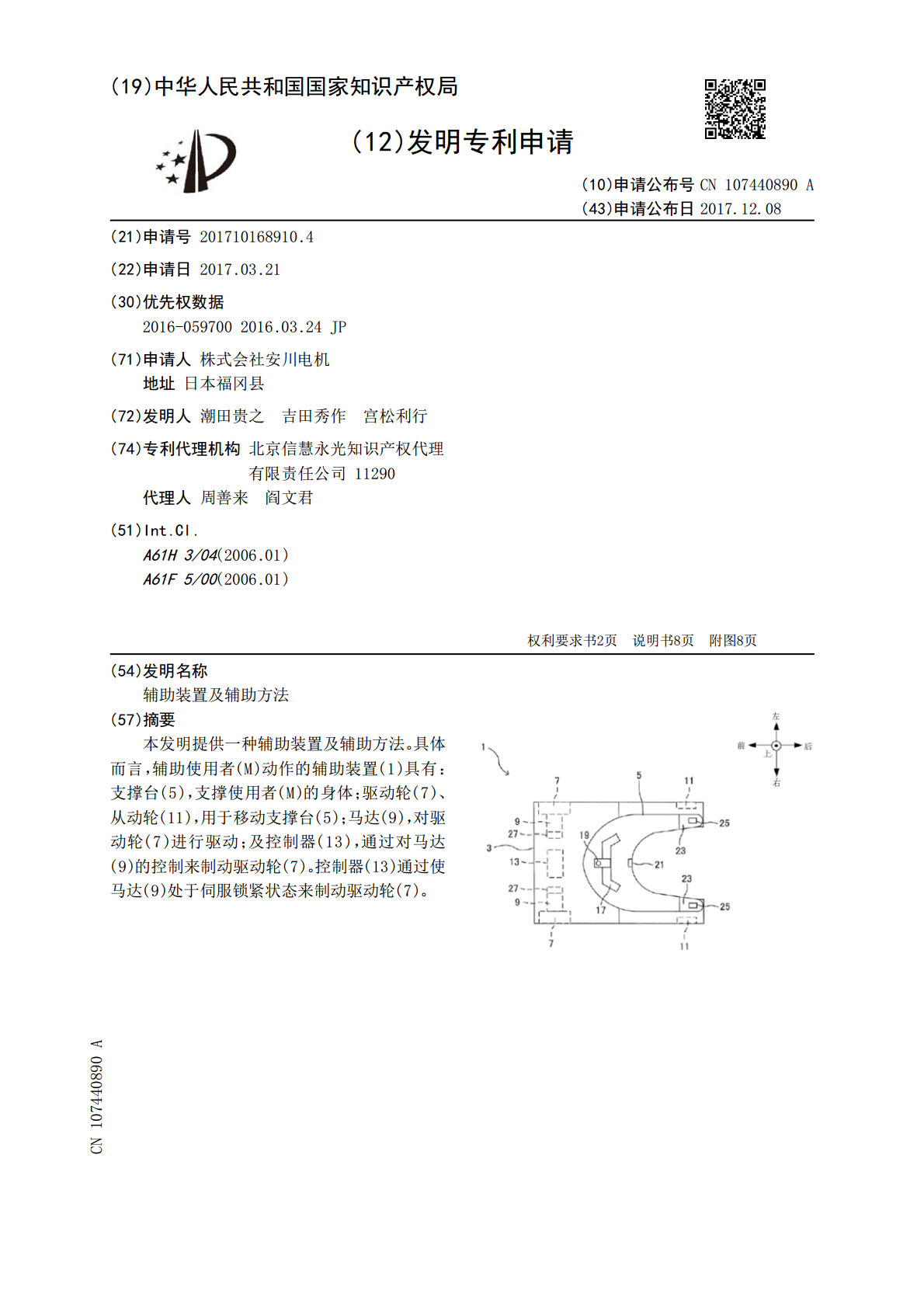
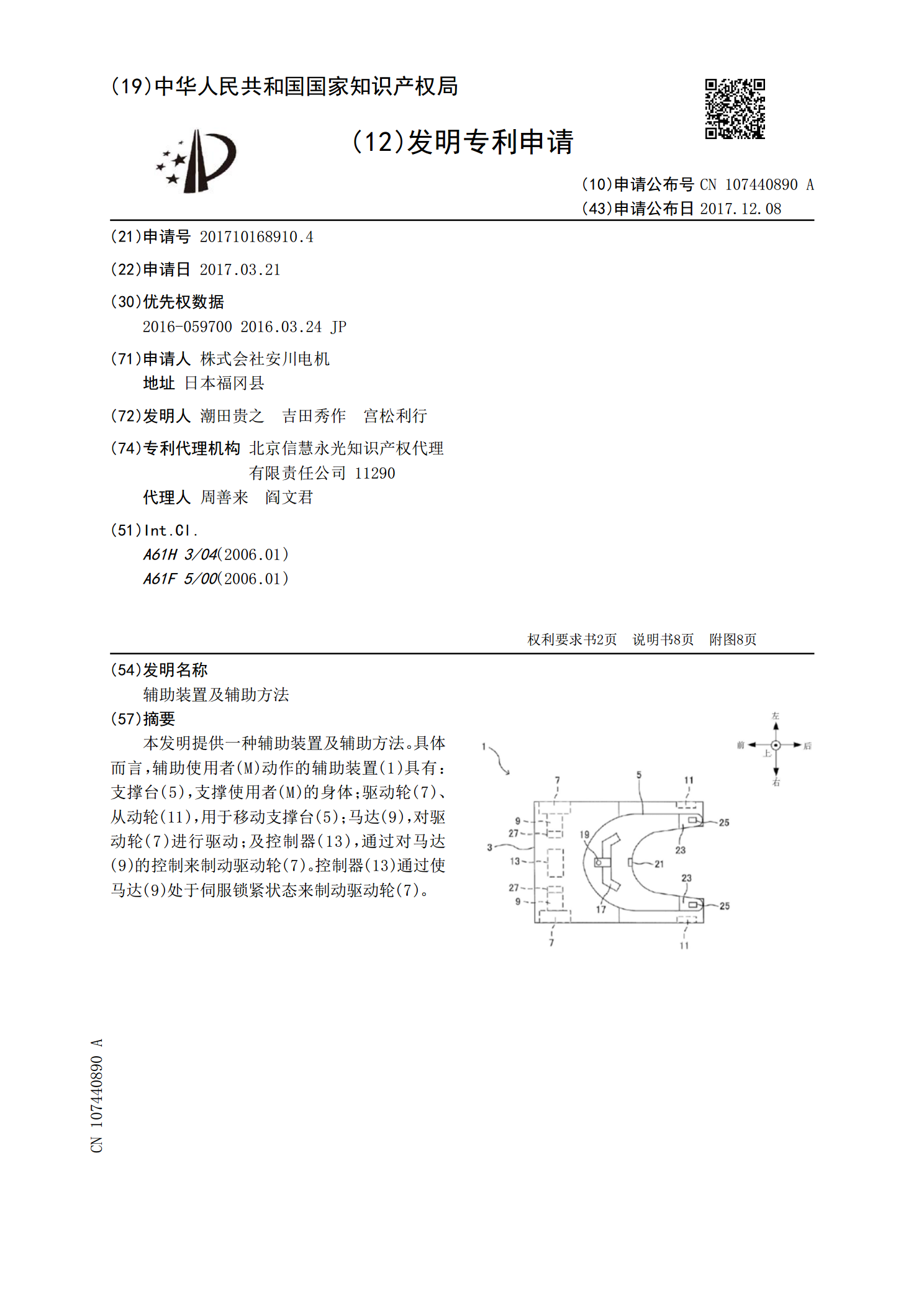
本发明提供一种辅助装置及辅助方法。具体而言,辅助使用者(M)动作的辅助装置(1)具有:支撑台(5),支撑使用者(M)的身体;驱动轮(7)、从动轮(11),用于移动支撑台(5);马达(9),对驱动轮(7)进行驱动;及控制器(13),通过对马达(9)的控制来制动驱动轮(7)。控制器(13)通过使马达(9)处于伺服锁紧状态来制动驱动轮(7)。

辅助装置、辅助方法以及程序.pdf
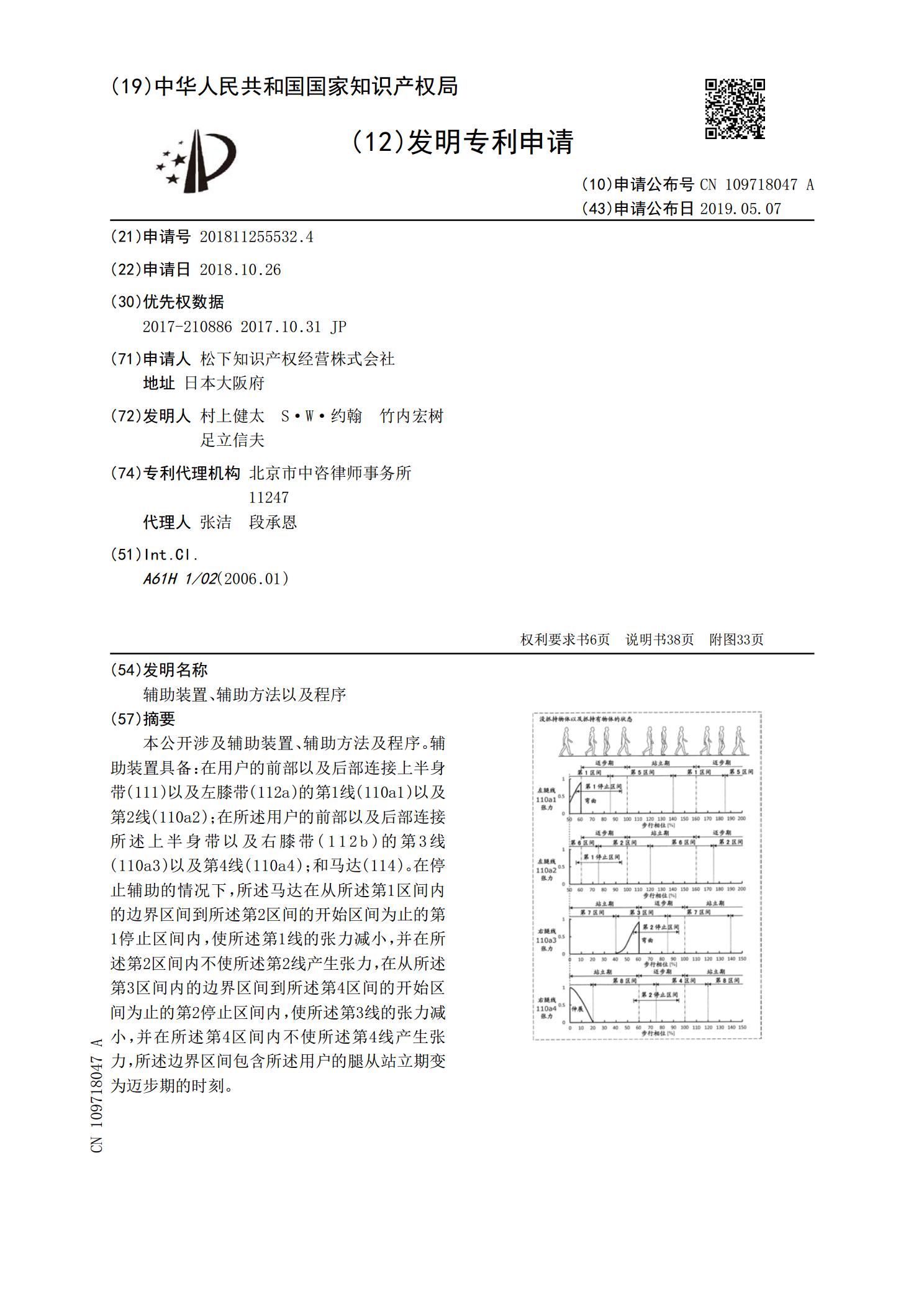
辅助装置在停止对用户步行的辅助的情况下,马达(114):关于左腿的步行相位,在从第1区间内所包含的、包含用户的左腿从站立期变为迈步期的时刻的区间到第2区间的开始区间为止的第1停止区间内,使在用户的前部及后部连接上半身带(111)以及左膝带(112a)的第1线(110a1)的张力以及第2线(110a2)的张力小于第2阈值;关于右腿的步行相位,在从第3区间内所包含的、包含用户的右腿从站立期变为迈步期的时刻的区间到第4区间的开始区间为止的第2停止区间内,使在所述用户的前部及后部连接所述上半身带(111)以及右膝
辅助装置、辅助方法以及程序.pdf
本公开涉及辅助装置、辅助方法及程序。辅助装置具备:在用户的前部以及后部连接上半身带(111)以及左膝带(112a)的第1线(110a1)以及第2线(110a2);在所述用户的前部以及后部连接所述上半身带以及右膝带(112b)的第3线(110a3)以及第4线(110a4);和马达(114)。在停止辅助的情况下,所述马达在从所述第1区间内的边界区间到所述第2区间的开始区间为止的第1停止区间内,使所述第1线的张力减小,并在所述第2区间内不使所述第2线产生张力,在从所述第3区间内的边界区间到所述第4区间的开始区间

停车辅助方法及停车辅助装置.pdf
在使用了停车辅助装置的停车辅助方法中,在以手动模式进行本车辆的停车的情况下,检测本车辆的停车执行状态,基于停车执行状态判定是否需要再次向目标停车位的停车,在判定为需要再次向目标停车位的停车的情况下,向用户界面输出将本车辆的停车模式从手动模式切换为自动模式的引导信息。
停车辅助装置及停车辅助方法.pdf
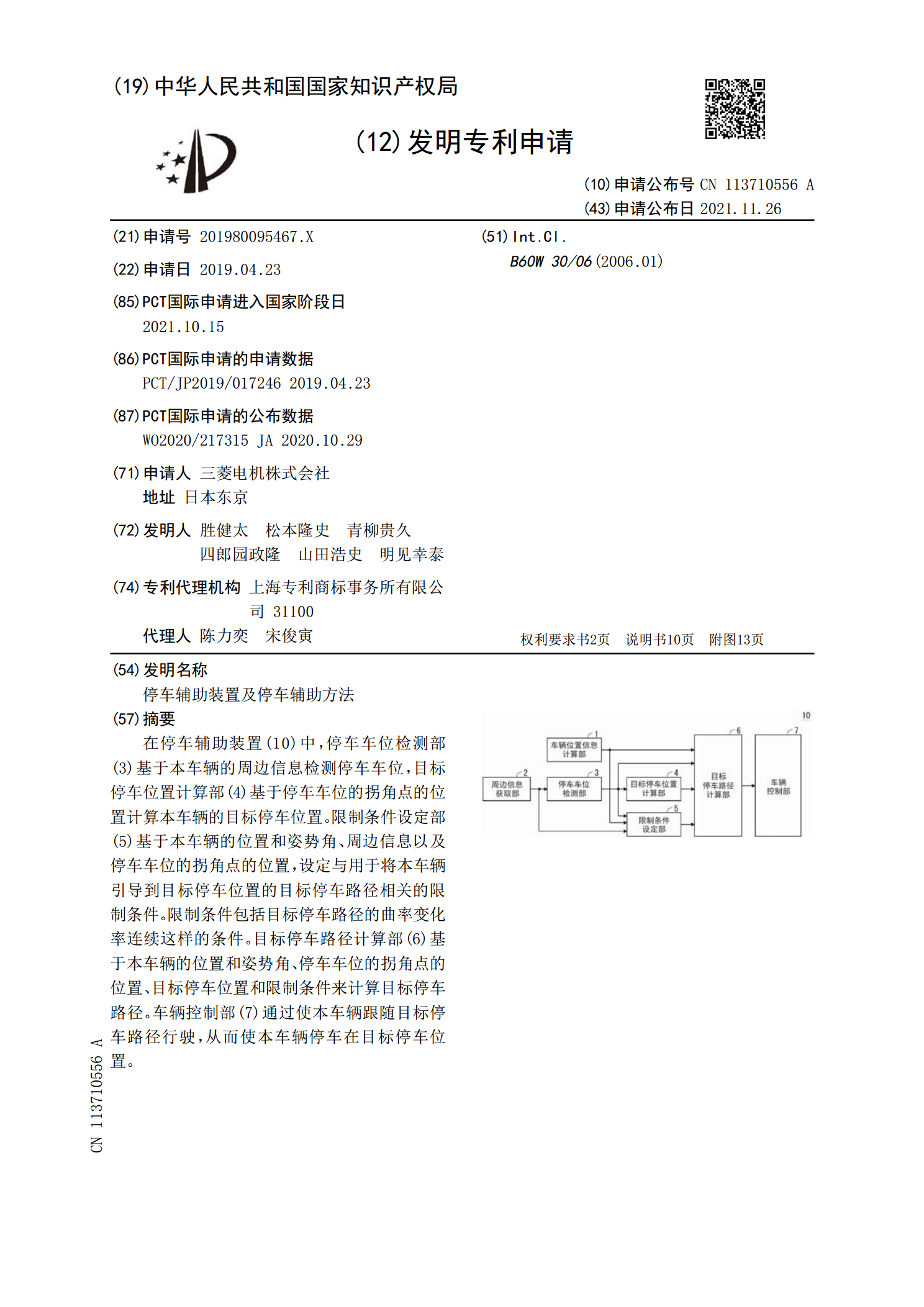
在停车辅助装置(10)中,停车车位检测部(3)基于本车辆的周边信息检测停车车位,目标停车位置计算部(4)基于停车车位的拐角点的位置计算本车辆的目标停车位置。限制条件设定部(5)基于本车辆的位置和姿势角、周边信息以及停车车位的拐角点的位置,设定与用于将本车辆引导到目标停车位置的目标停车路径相关的限制条件。限制条件包括目标停车路径的曲率变化率连续这样的条件。目标停车路径计算部(6)基于本车辆的位置和姿势角、停车车位的拐角点的位置、目标停车位置和限制条件来计算目标停车路径。车辆控制部(7)通过使本车辆跟随目标停