
一种搬运小型物料用的AGV小车及其工作方法.pdf

论文****轩吖

1/6
2/6
3/6

4/6
5/6

6/6
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料
一种搬运小型物料用的AGV小车及其工作方法.pdf
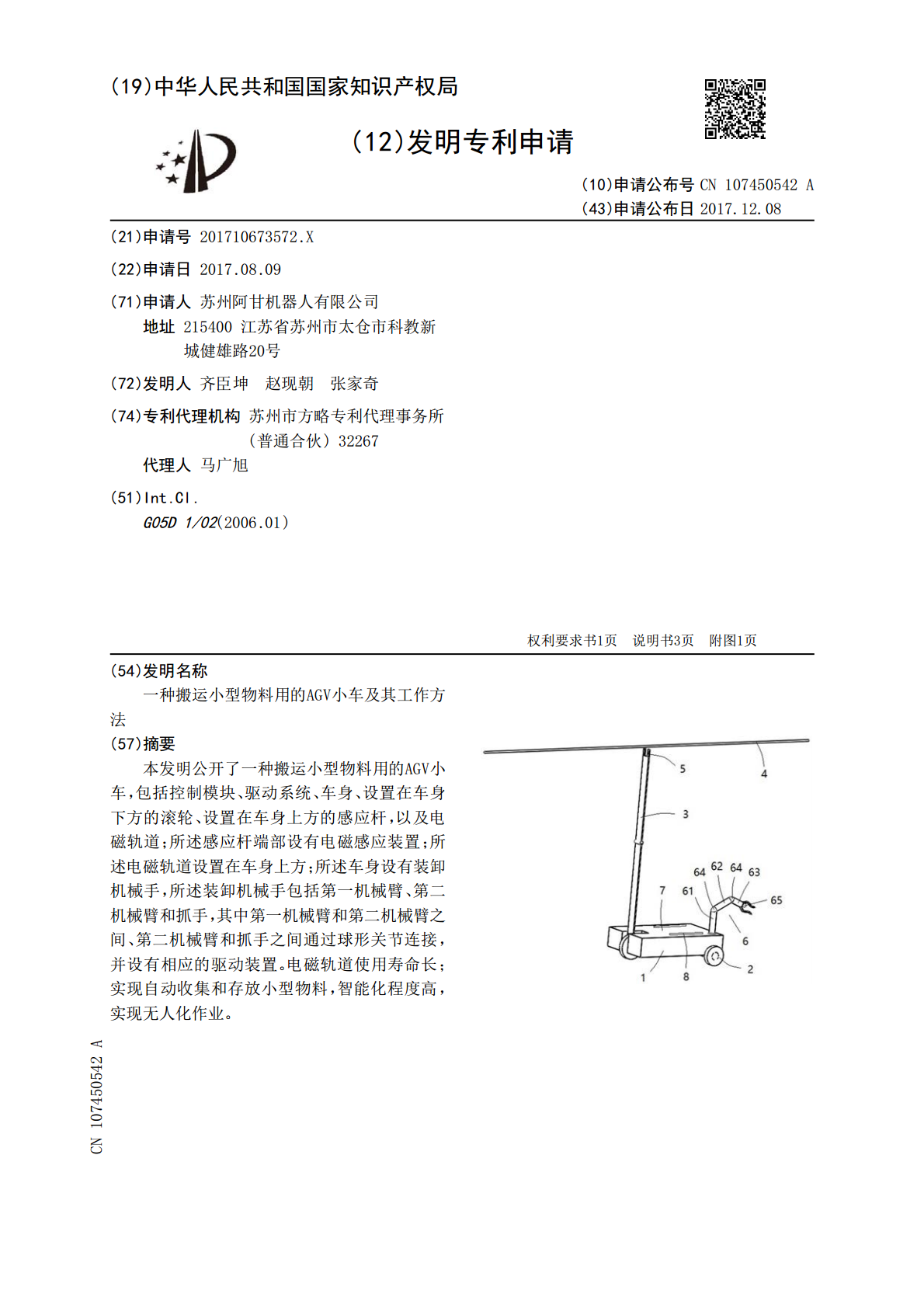
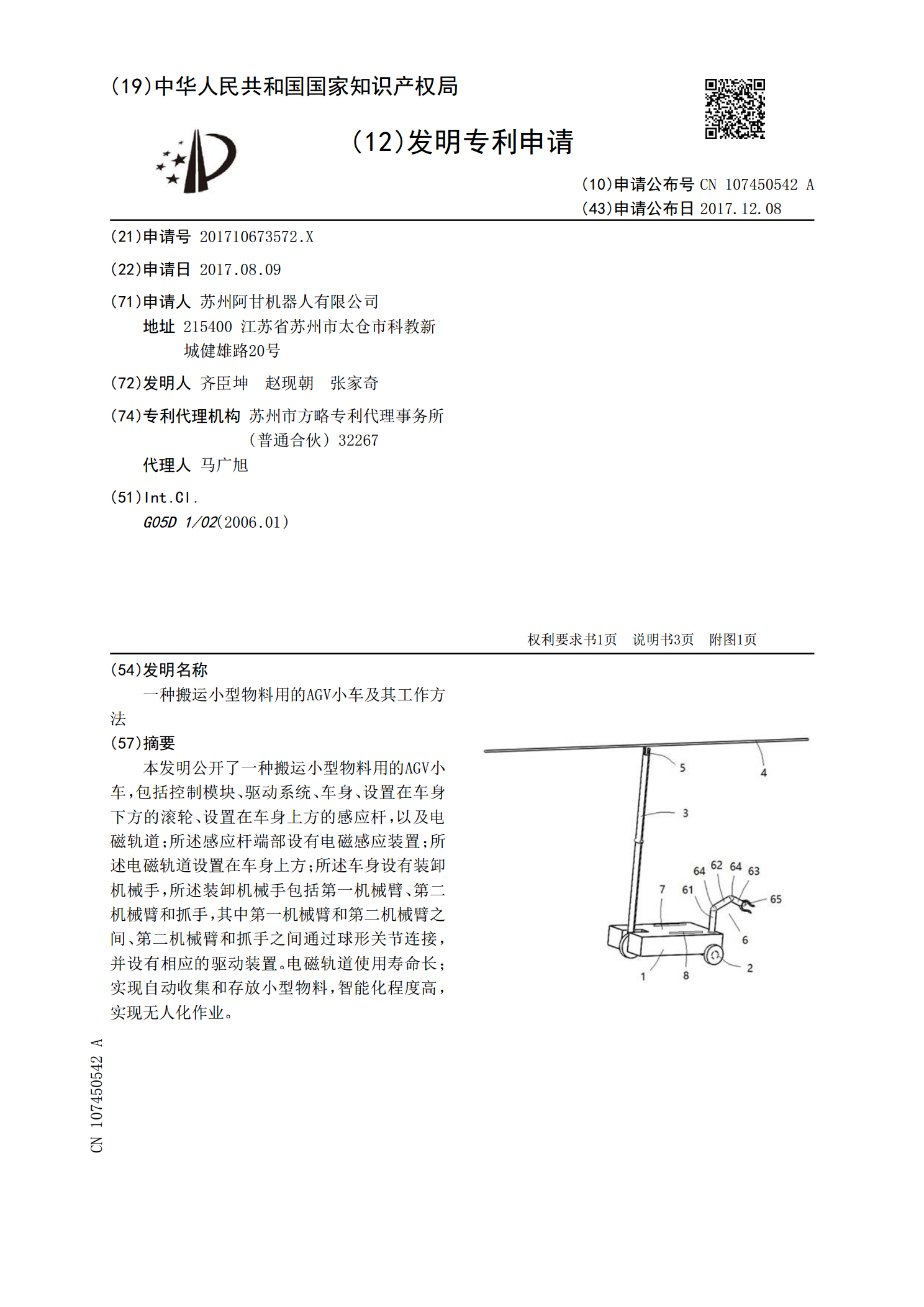
本发明公开了一种搬运小型物料用的AGV小车,包括控制模块、驱动系统、车身、设置在车身下方的滚轮、设置在车身上方的感应杆,以及电磁轨道;所述感应杆端部设有电磁感应装置;所述电磁轨道设置在车身上方;所述车身设有装卸机械手,所述装卸机械手包括第一机械臂、第二机械臂和抓手,其中第一机械臂和第二机械臂之间、第二机械臂和抓手之间通过球形关节连接,并设有相应的驱动装置。电磁轨道使用寿命长;实现自动收集和存放小型物料,智能化程度高,实现无人化作业。
一种糖厂搬运AGV小车及其工作方法.pdf
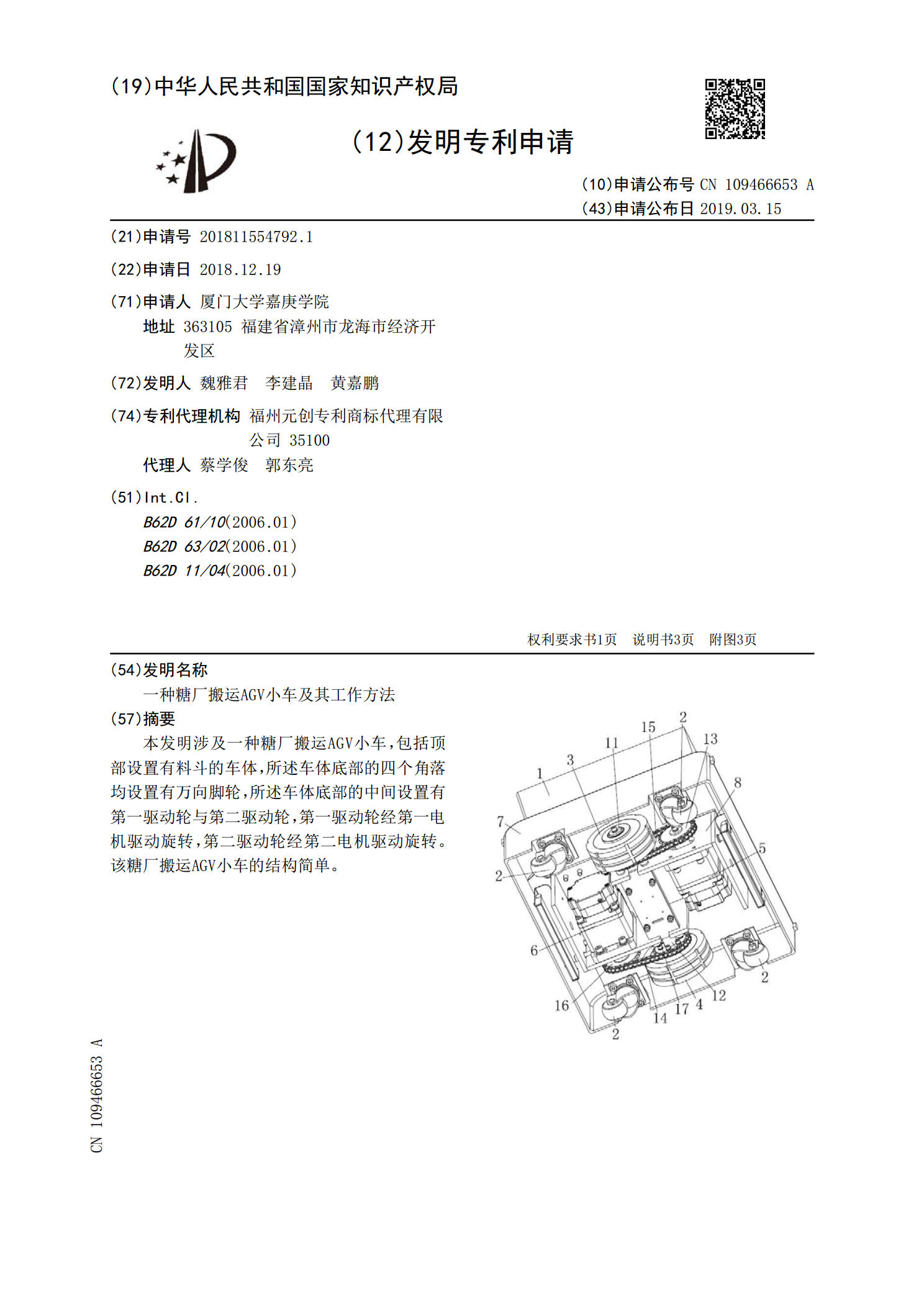
本发明涉及一种糖厂搬运AGV小车,包括顶部设置有料斗的车体,所述车体底部的四个角落均设置有万向脚轮,所述车体底部的中间设置有第一驱动轮与第二驱动轮,第一驱动轮经第一电机驱动旋转,第二驱动轮经第二电机驱动旋转。该糖厂搬运AGV小车的结构简单。
一种搬运板状工件用的AGV小车及其工作方法.pdf
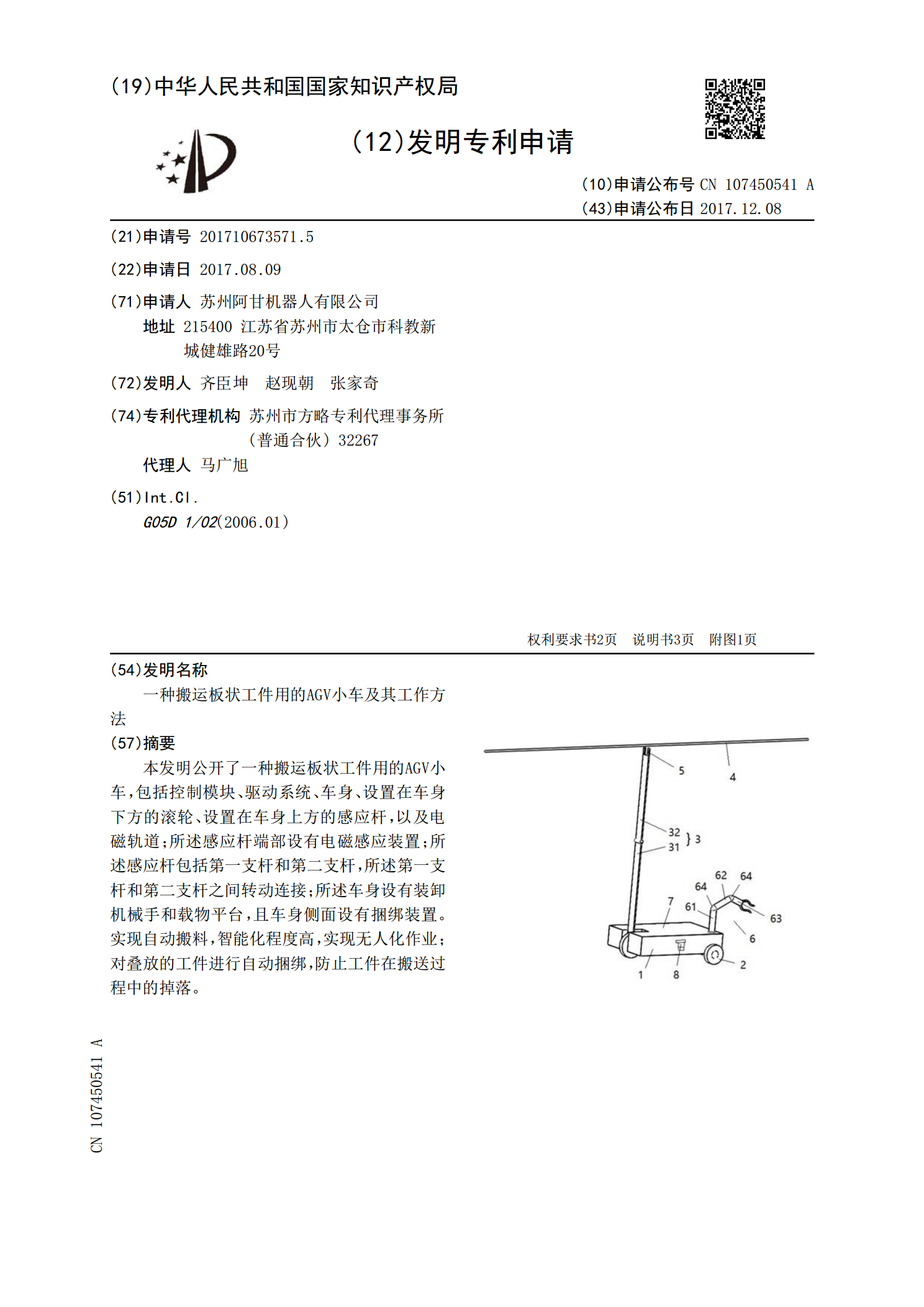
本发明公开了一种搬运板状工件用的AGV小车,包括控制模块、驱动系统、车身、设置在车身下方的滚轮、设置在车身上方的感应杆,以及电磁轨道;所述感应杆端部设有电磁感应装置;所述感应杆包括第一支杆和第二支杆,所述第一支杆和第二支杆之间转动连接;所述车身设有装卸机械手和载物平台,且车身侧面设有捆绑装置。实现自动搬料,智能化程度高,实现无人化作业;对叠放的工件进行自动捆绑,防止工件在搬送过程中的掉落。
一种多工位物料搬运AGV小车.pdf
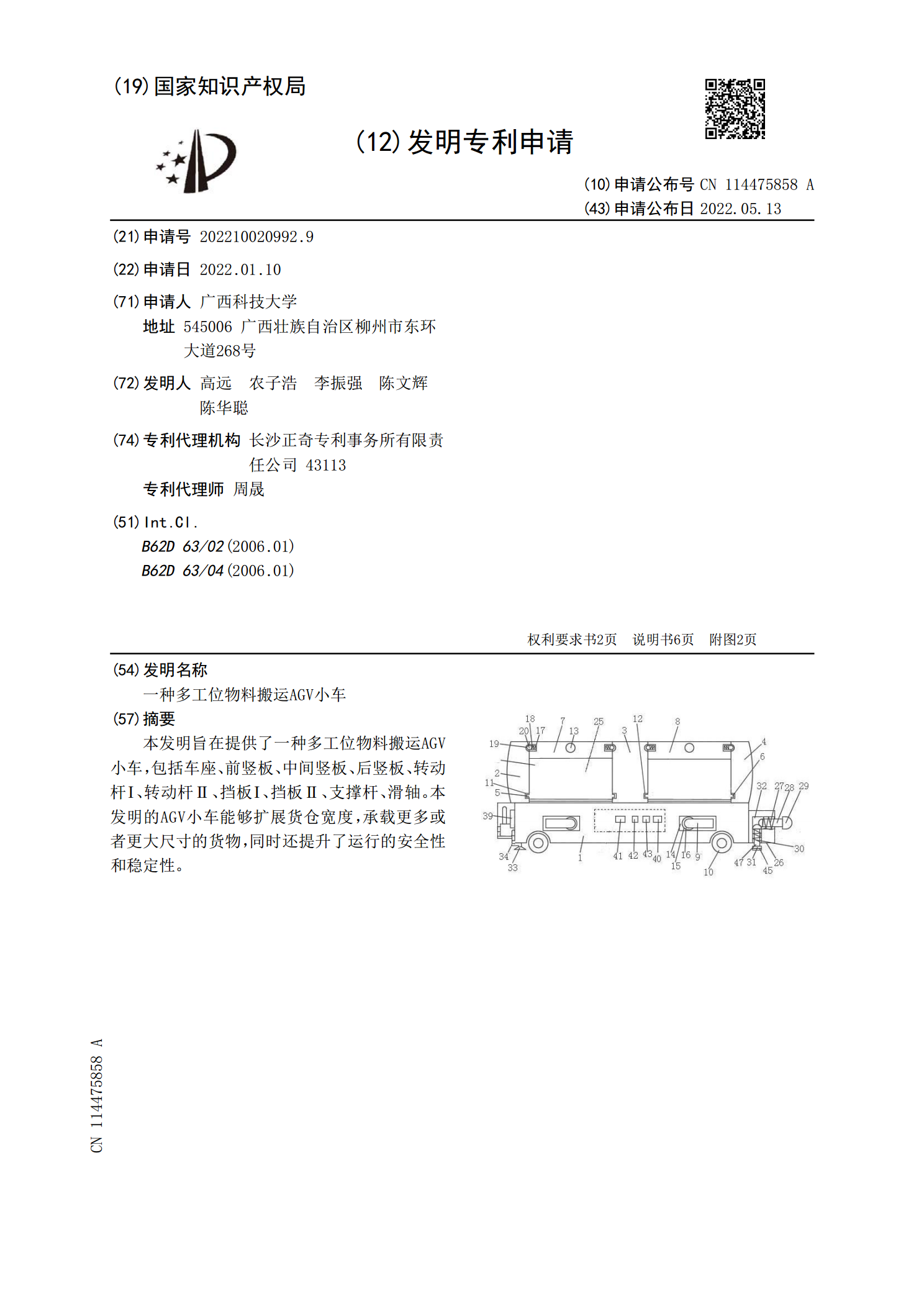
本发明旨在提供了一种多工位物料搬运AGV小车,包括车座、前竖板、中间竖板、后竖板、转动杆Ⅰ、转动杆Ⅱ、挡板Ⅰ、挡板Ⅱ、支撑杆、滑轴。本发明的AGV小车能够扩展货仓宽度,承载更多或者更大尺寸的货物,同时还提升了运行的安全性和稳定性。
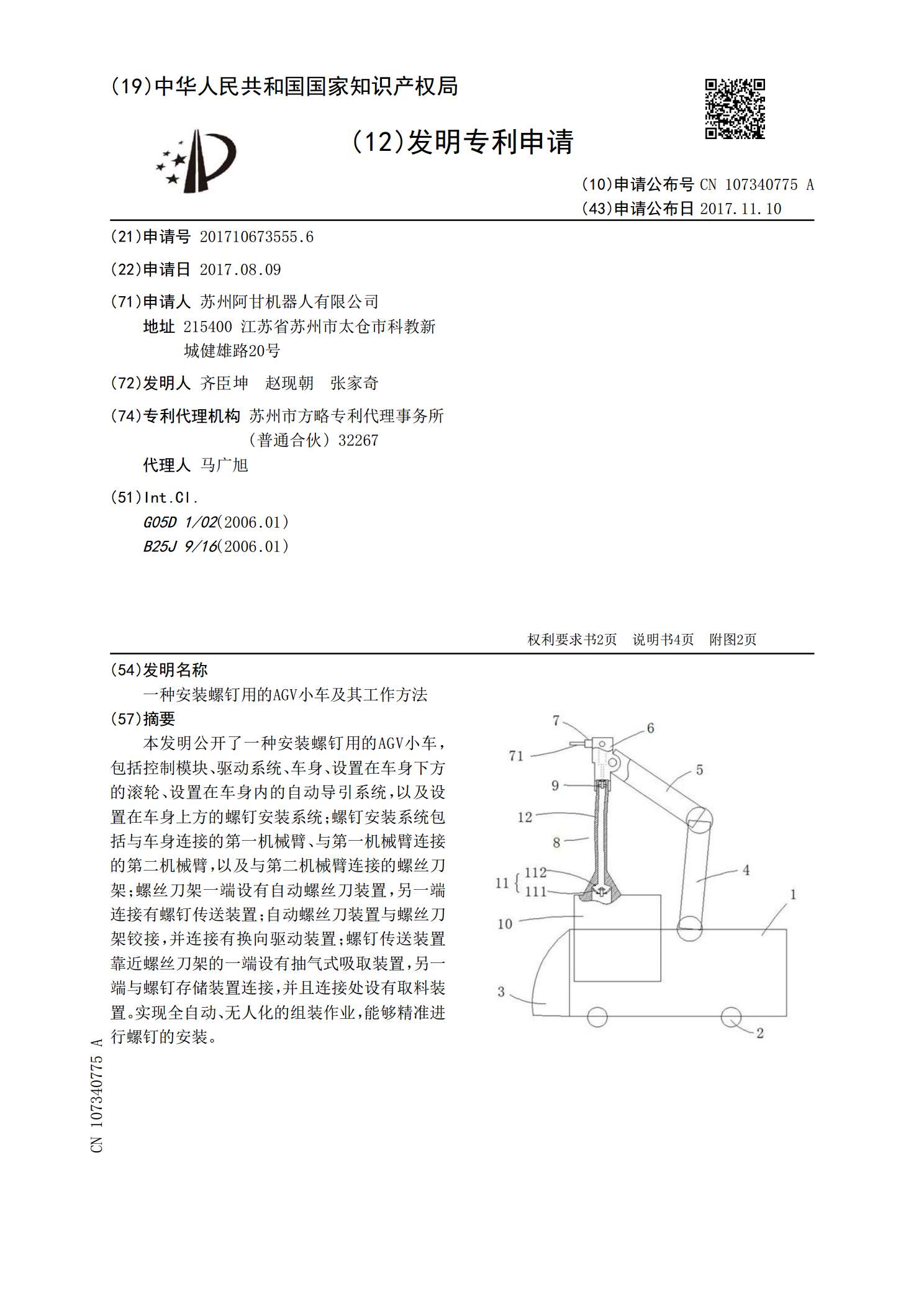
一种安装螺钉用的AGV小车及其工作方法.pdf
本发明公开了一种安装螺钉用的AGV小车,包括控制模块、驱动系统、车身、设置在车身下方的滚轮、设置在车身内的自动导引系统,以及设置在车身上方的螺钉安装系统;螺钉安装系统包括与车身连接的第一机械臂、与第一机械臂连接的第二机械臂,以及与第二机械臂连接的螺丝刀架;螺丝刀架一端设有自动螺丝刀装置,另一端连接有螺钉传送装置;自动螺丝刀装置与螺丝刀架铰接,并连接有换向驱动装置;螺钉传送装置靠近螺丝刀架的一端设有抽气式吸取装置,另一端与螺钉存储装置连接,并且连接处设有取料装置。实现全自动、无人化的组装作业,能够精准进行螺