
移动智能跟踪车.pdf

永梅****33


1/5

2/5
3/5
4/5

5/5
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料
移动智能跟踪车.pdf
本发明属于机器人领域,具体为一种移动智能跟踪车。包括有上位机(1)、下位机(2)、车体(3)、云台(4)、摄像头(5)、语音模块(6)、云台驱动(7)、车轮驱动(8)、激光测距模块(9)。移动智能跟踪车可工作于三种模式,第一种模式为按存储模板跟踪,第二种模式为按模板选定框中内容跟踪,第三种模式为按运动目标检测结果跟踪,使用者利用语音指令进行选择。本发明可作为机场行李车或超市购物车使用。

移动智能寻迹车.pdf
本发明属于机器人领域,具体为一种移动智能寻迹车,包括有上位机(1)、下位机(2)、车体(3)、云台(4)、摄像头(5)、语音模块(6)、云台驱动(7)、车轮驱动(8)、激光测距模块(9)。工作场所的路径地图存储在上位机(1)中。采用蚁群算法规划出行走路径,上位机(1)利用摄像头(5)实时采集当前场景,并实时判断当前坐标位置,与所规划的路径进行对比,通过寻迹到达指定位置。本发明可作为大型工厂车间或物流配送场所的物料配送车使用。
智能AGV车实时跟踪方法及跟踪系统.pdf
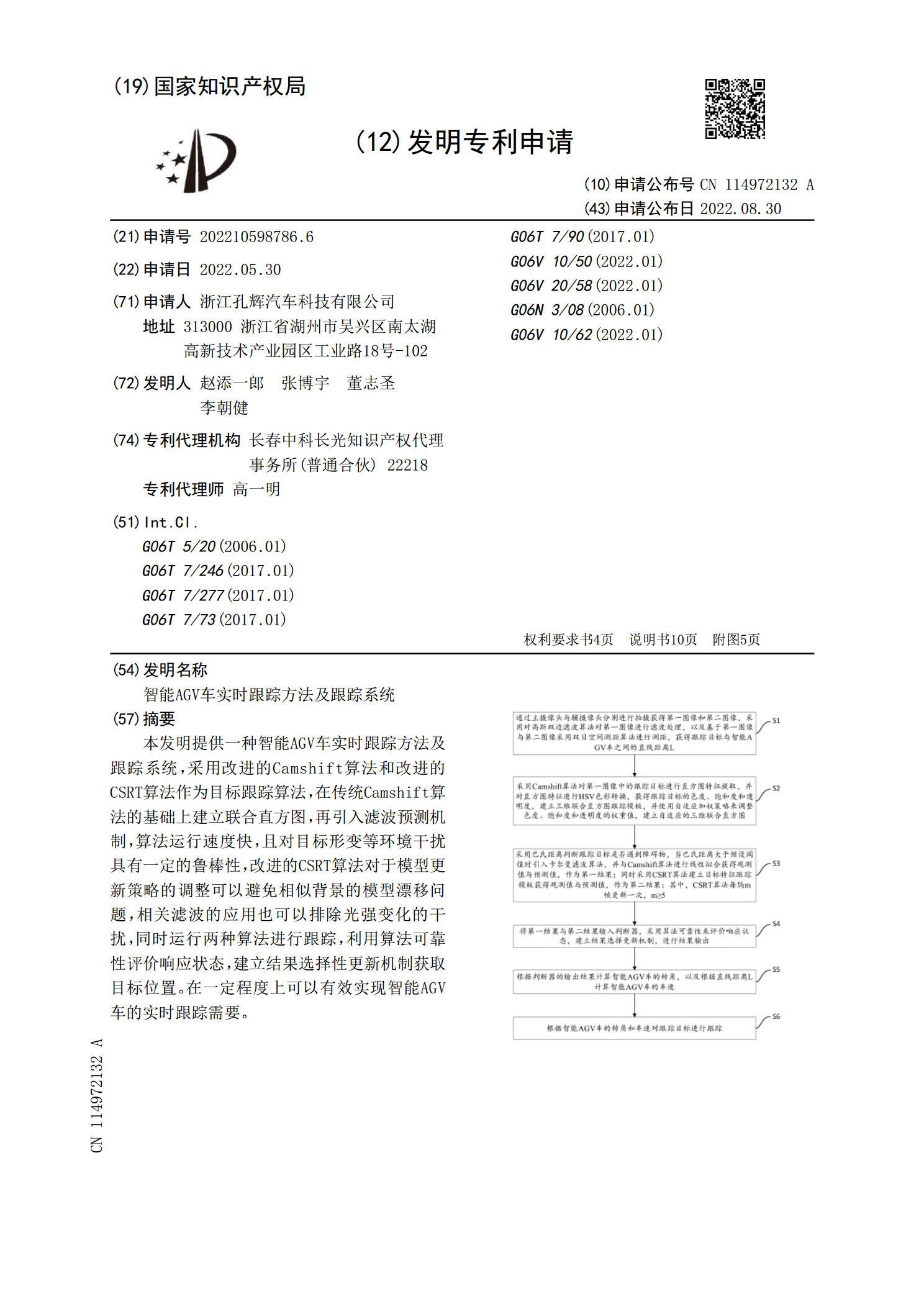
本发明提供一种智能AGV车实时跟踪方法及跟踪系统,采用改进的Camshift算法和改进的CSRT算法作为目标跟踪算法,在传统Camshift算法的基础上建立联合直方图,再引入滤波预测机制,算法运行速度快,且对目标形变等环境干扰具有一定的鲁棒性,改进的CSRT算法对于模型更新策略的调整可以避免相似背景的模型漂移问题,相关滤波的应用也可以排除光强变化的干扰,同时运行两种算法进行跟踪,利用算法可靠性评价响应状态,建立结果选择性更新机制获取目标位置。在一定程度上可以有效实现智能AGV车的实时跟踪需要。
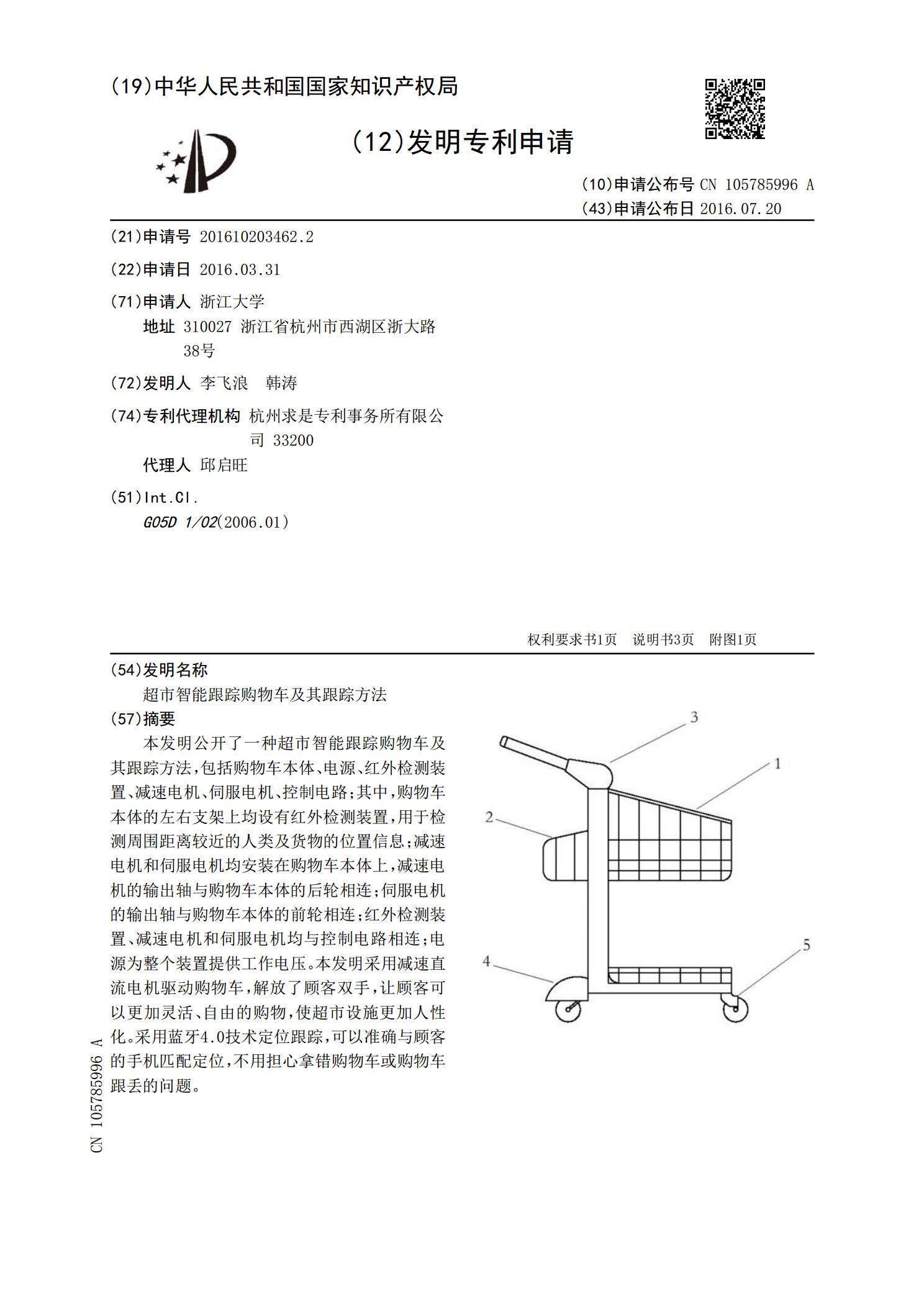
超市智能跟踪购物车及其跟踪方法.pdf
本发明公开了一种超市智能跟踪购物车及其跟踪方法,包括购物车本体、电源、红外检测装置、减速电机、伺服电机、控制电路;其中,购物车本体的左右支架上均设有红外检测装置,用于检测周围距离较近的人类及货物的位置信息;减速电机和伺服电机均安装在购物车本体上,减速电机的输出轴与购物车本体的后轮相连;伺服电机的输出轴与购物车本体的前轮相连;红外检测装置、减速电机和伺服电机均与控制电路相连;电源为整个装置提供工作电压。本发明采用减速直流电机驱动购物车,解放了顾客双手,让顾客可以更加灵活、自由的购物,使超市设施更加人性化。采
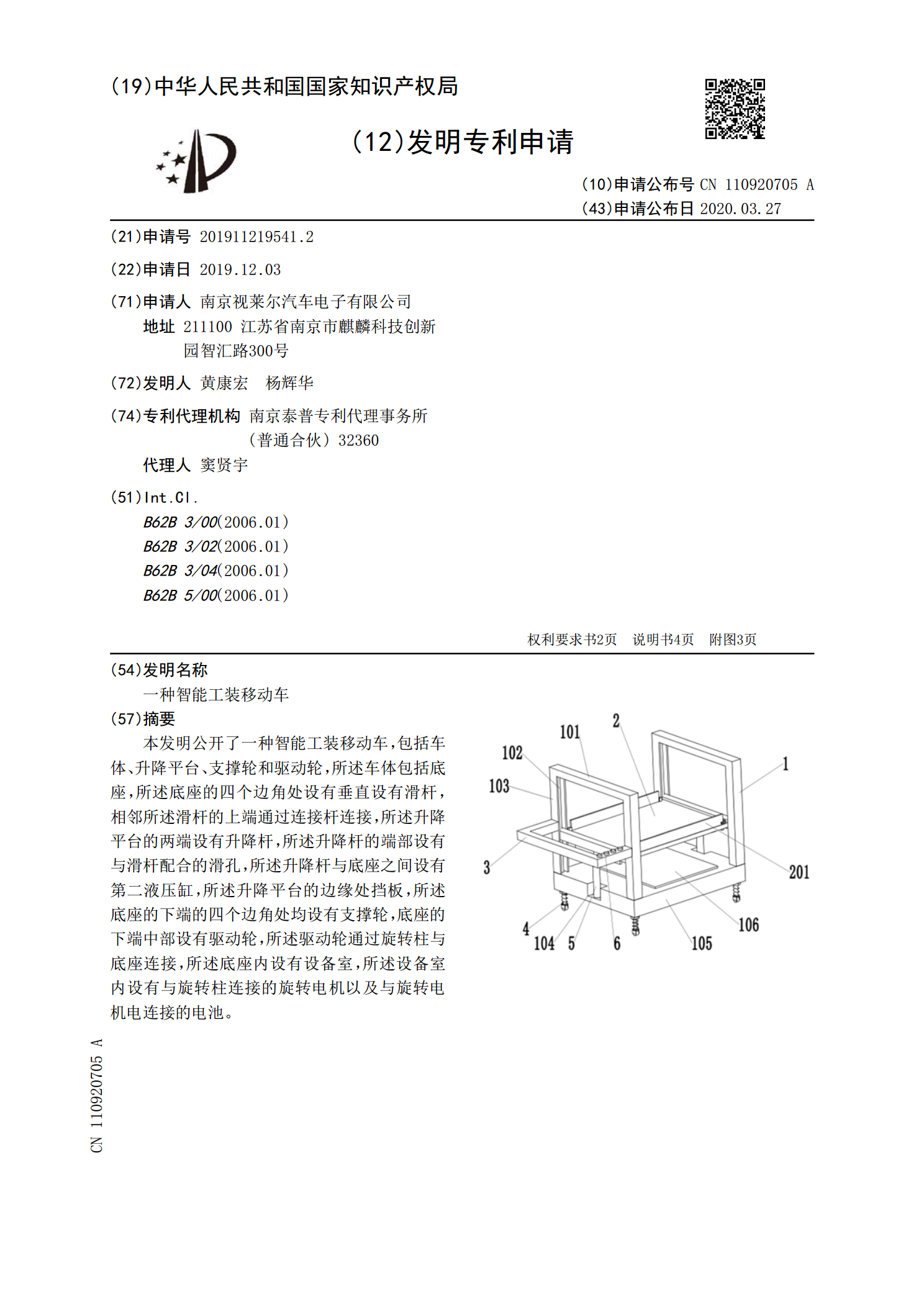
一种智能工装移动车.pdf
本发明公开了一种智能工装移动车,包括车体、升降平台、支撑轮和驱动轮,所述车体包括底座,所述底座的四个边角处设有垂直设有滑杆,相邻所述滑杆的上端通过连接杆连接,所述升降平台的两端设有升降杆,所述升降杆的端部设有与滑杆配合的滑孔,所述升降杆与底座之间设有第二液压缸,所述升降平台的边缘处挡板,所述底座的下端的四个边角处均设有支撑轮,底座的下端中部设有驱动轮,所述驱动轮通过旋转柱与底座连接,所述底座内设有设备室,所述设备室内设有与旋转柱连接的旋转电机以及与旋转电机电连接的电池。