
移动智能寻迹车.pdf

雨巷****怡轩

1/5

2/5
3/5
4/5

5/5
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

移动智能寻迹车.pdf
本发明属于机器人领域,具体为一种移动智能寻迹车,包括有上位机(1)、下位机(2)、车体(3)、云台(4)、摄像头(5)、语音模块(6)、云台驱动(7)、车轮驱动(8)、激光测距模块(9)。工作场所的路径地图存储在上位机(1)中。采用蚁群算法规划出行走路径,上位机(1)利用摄像头(5)实时采集当前场景,并实时判断当前坐标位置,与所规划的路径进行对比,通过寻迹到达指定位置。本发明可作为大型工厂车间或物流配送场所的物料配送车使用。
小型智能寻迹喷灌车.pdf
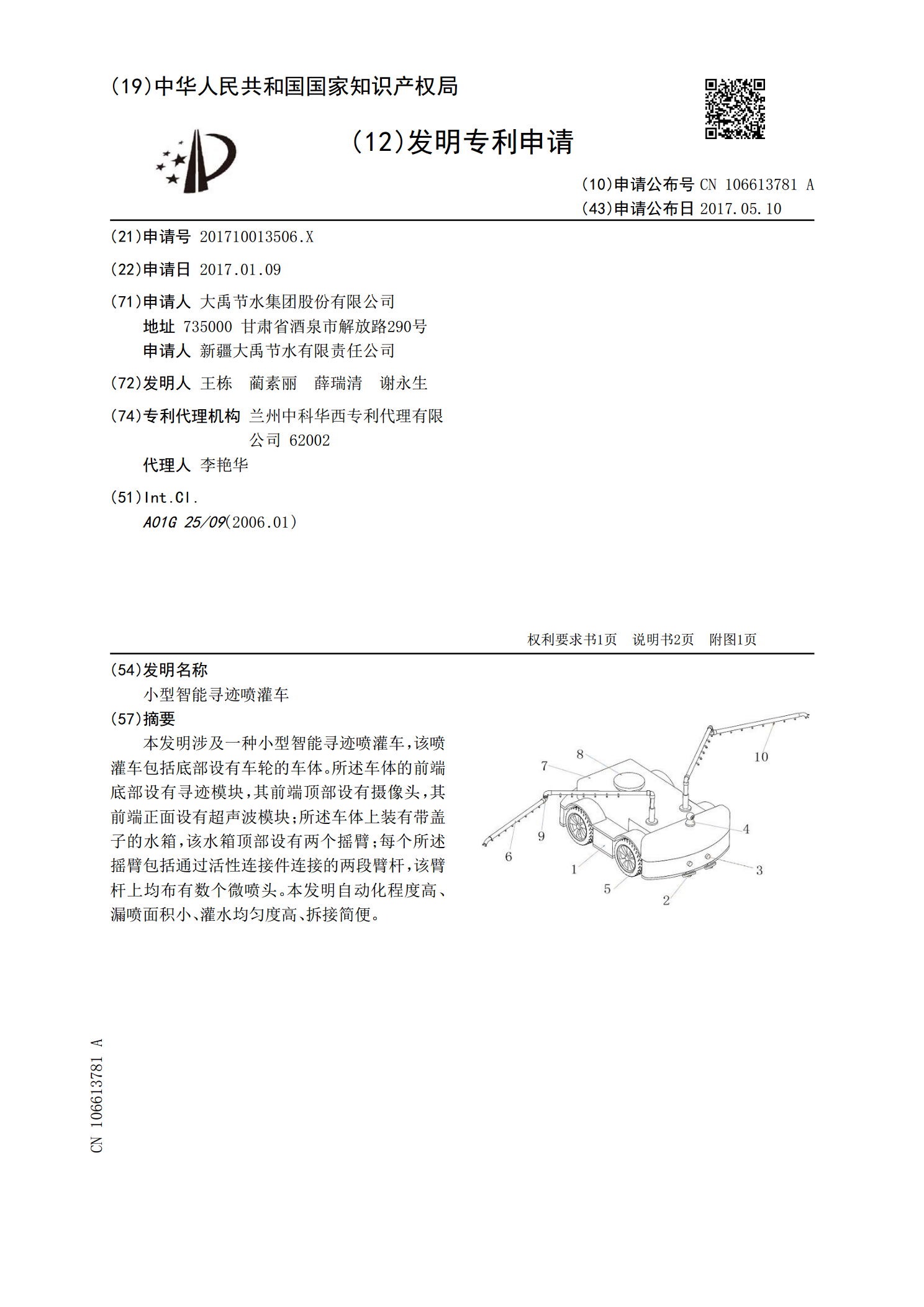
本发明涉及一种小型智能寻迹喷灌车,该喷灌车包括底部设有车轮的车体。所述车体的前端底部设有寻迹模块,其前端顶部设有摄像头,其前端正面设有超声波模块;所述车体上装有带盖子的水箱,该水箱顶部设有两个摇臂;每个所述摇臂包括通过活性连接件连接的两段臂杆,该臂杆上均布有数个微喷头。本发明自动化程度高、漏喷面积小、灌水均匀度高、拆接简便。

智能机器车功能开发(自动寻迹).doc
本科毕业论文(设计)智能机器车功能开发(自动寻迹)FunctionalDevelopmentofIntelligentRobotCar(AutomaticTracing)摘要智能机器车,即自动运行的机器车,智能是以后科技的发展方向,他可以按照预先设定的模式在一个环境里自动的运作,而不需要人的控制。如今,智能机器车可应用于科学勘探或是未来汽车自动行驶等等的用途。智能机器车具有自动寻迹、自动避障功能以及可控的红外遥控功能。本次课题设计的智能机器车以Atmel公司的89S52单片机为主要控制核心,通过红外寻迹系

智能机器车功能开发(自动寻迹).doc
本科毕业论文(设计)智能机器车功能开发(自动寻迹)FunctionalDevelopmentofIntelligentRobotCar(AutomaticTracing)摘要智能机器车,即自动运行的机器车,智能是以后科技的发展方向,他可以按照预先设定的模式在一个环境里自动的运作,而不需要人的控制。如今,智能机器车可应用于科学勘探或是未来汽车自动行驶等等的用途。智能机器车具有自动寻迹、自动避障功能以及可控的红外遥控功能。本次课题设计的智能机器车以Atmel公司的89S52单片机为主要控制核心,通过红外寻迹系

智能机器车功能开发(自动寻迹).doc
本科毕业论文(设计)智能机器车功能开发(自动寻迹)FunctionalDevelopmentofIntelligentRobotCar(AutomaticTracing)摘要智能机器车,即自动运行的机器车,智能是以后科技的发展方向,他可以按照预先设定的模式在一个环境里自动的运作,而不需要人的控制。如今,智能机器车可应用于科学勘探或是未来汽车自动行驶等等的用途。智能机器车具有自动寻迹、自动避障功能以及可控的红外遥控功能。本次课题设计的智能机器车以Atmel公司的89S52单片机为主要控制核心,通过红外寻迹系