
智能AGV车实时跟踪方法及跟踪系统.pdf

一条****涛k

1/10

2/10
3/10
4/10
5/10
6/10
7/10

8/10
9/10
10/10
亲,该文档总共20页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
智能AGV车实时跟踪方法及跟踪系统.pdf
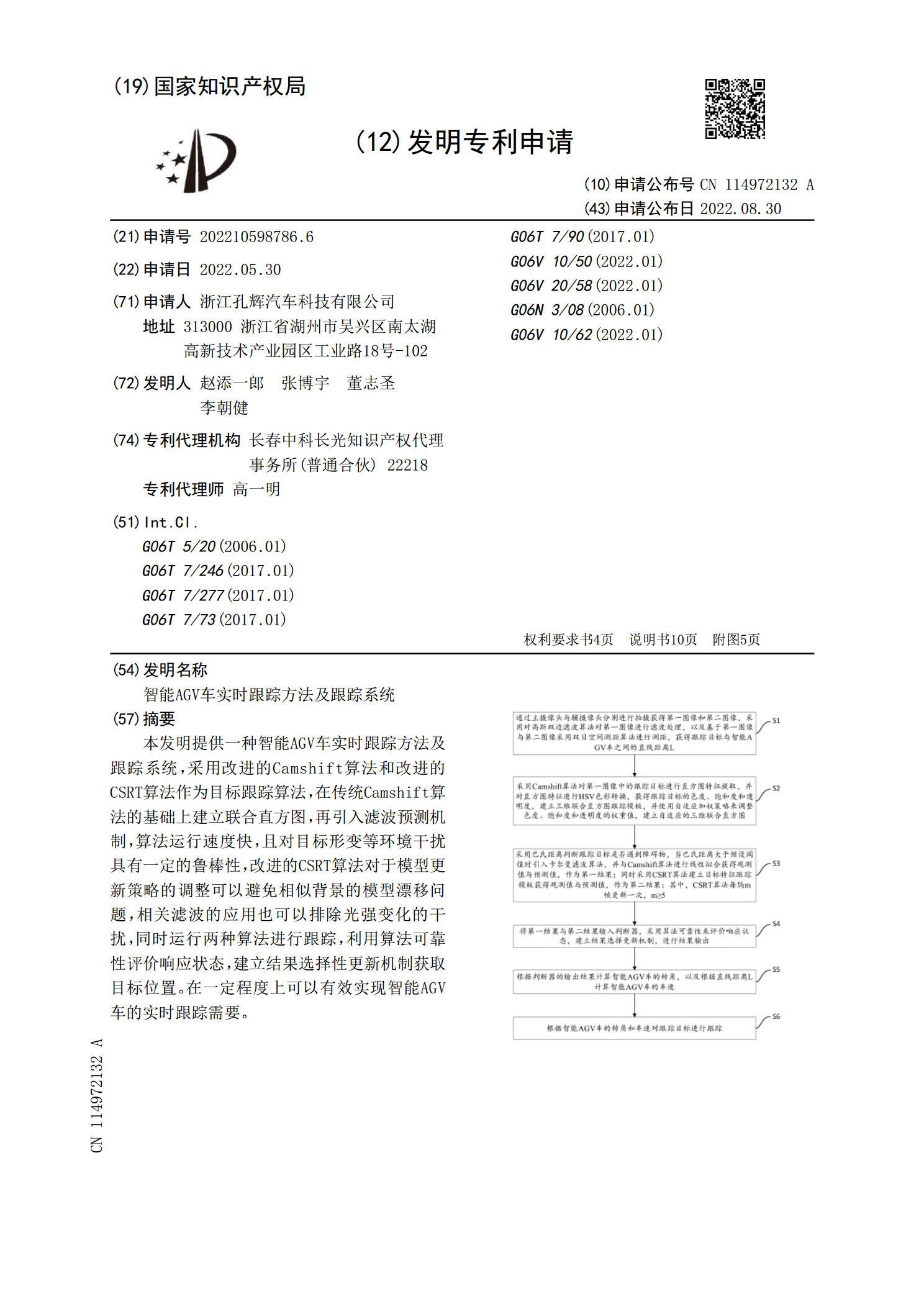
本发明提供一种智能AGV车实时跟踪方法及跟踪系统,采用改进的Camshift算法和改进的CSRT算法作为目标跟踪算法,在传统Camshift算法的基础上建立联合直方图,再引入滤波预测机制,算法运行速度快,且对目标形变等环境干扰具有一定的鲁棒性,改进的CSRT算法对于模型更新策略的调整可以避免相似背景的模型漂移问题,相关滤波的应用也可以排除光强变化的干扰,同时运行两种算法进行跟踪,利用算法可靠性评价响应状态,建立结果选择性更新机制获取目标位置。在一定程度上可以有效实现智能AGV车的实时跟踪需要。
AGV系统的轨迹跟踪控制方法.pdf
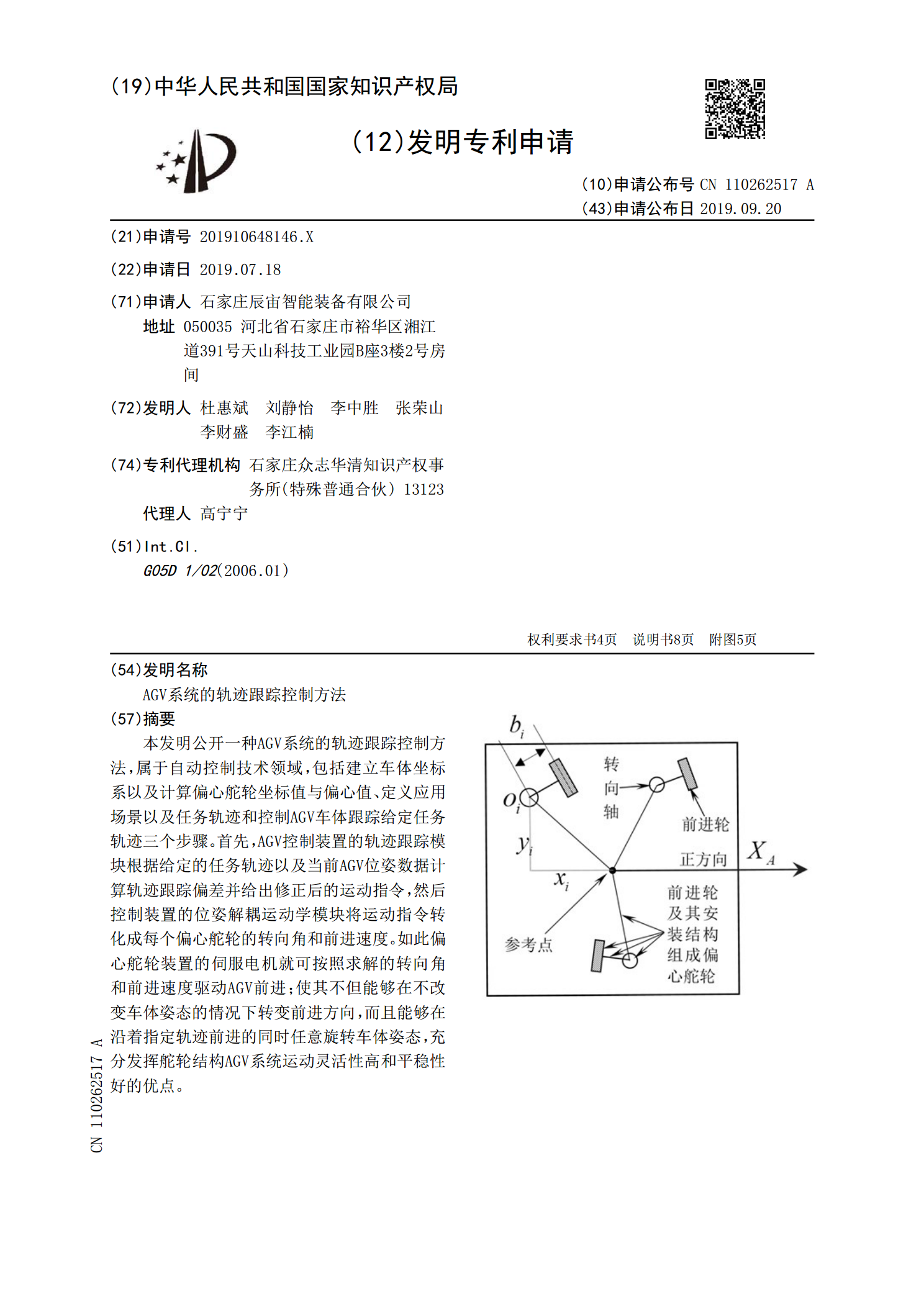
本发明公开一种AGV系统的轨迹跟踪控制方法,属于自动控制技术领域,包括建立车体坐标系以及计算偏心舵轮坐标值与偏心值、定义应用场景以及任务轨迹和控制AGV车体跟踪给定任务轨迹三个步骤。首先,AGV控制装置的轨迹跟踪模块根据给定的任务轨迹以及当前AGV位姿数据计算轨迹跟踪偏差并给出修正后的运动指令,然后控制装置的位姿解耦运动学模块将运动指令转化成每个偏心舵轮的转向角和前进速度。如此偏心舵轮装置的伺服电机就可按照求解的转向角和前进速度驱动AGV前进;使其不但能够在不改变车体姿态的情况下转变前进方向,而且能够在沿
超市智能跟踪购物车及其跟踪方法.pdf
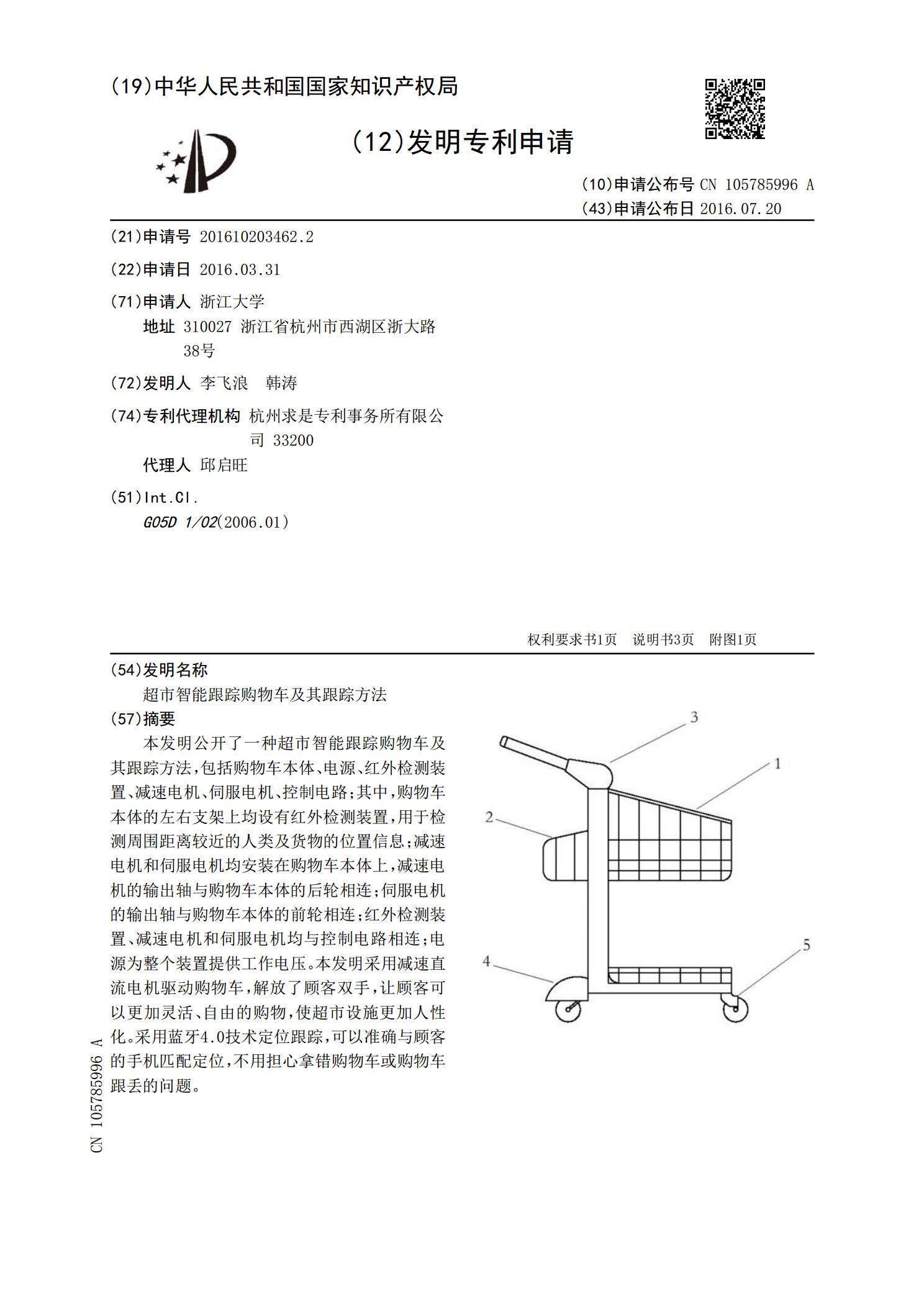
本发明公开了一种超市智能跟踪购物车及其跟踪方法,包括购物车本体、电源、红外检测装置、减速电机、伺服电机、控制电路;其中,购物车本体的左右支架上均设有红外检测装置,用于检测周围距离较近的人类及货物的位置信息;减速电机和伺服电机均安装在购物车本体上,减速电机的输出轴与购物车本体的后轮相连;伺服电机的输出轴与购物车本体的前轮相连;红外检测装置、减速电机和伺服电机均与控制电路相连;电源为整个装置提供工作电压。本发明采用减速直流电机驱动购物车,解放了顾客双手,让顾客可以更加灵活、自由的购物,使超市设施更加人性化。采
基于AGV系统的轨迹跟踪控制方法.pdf
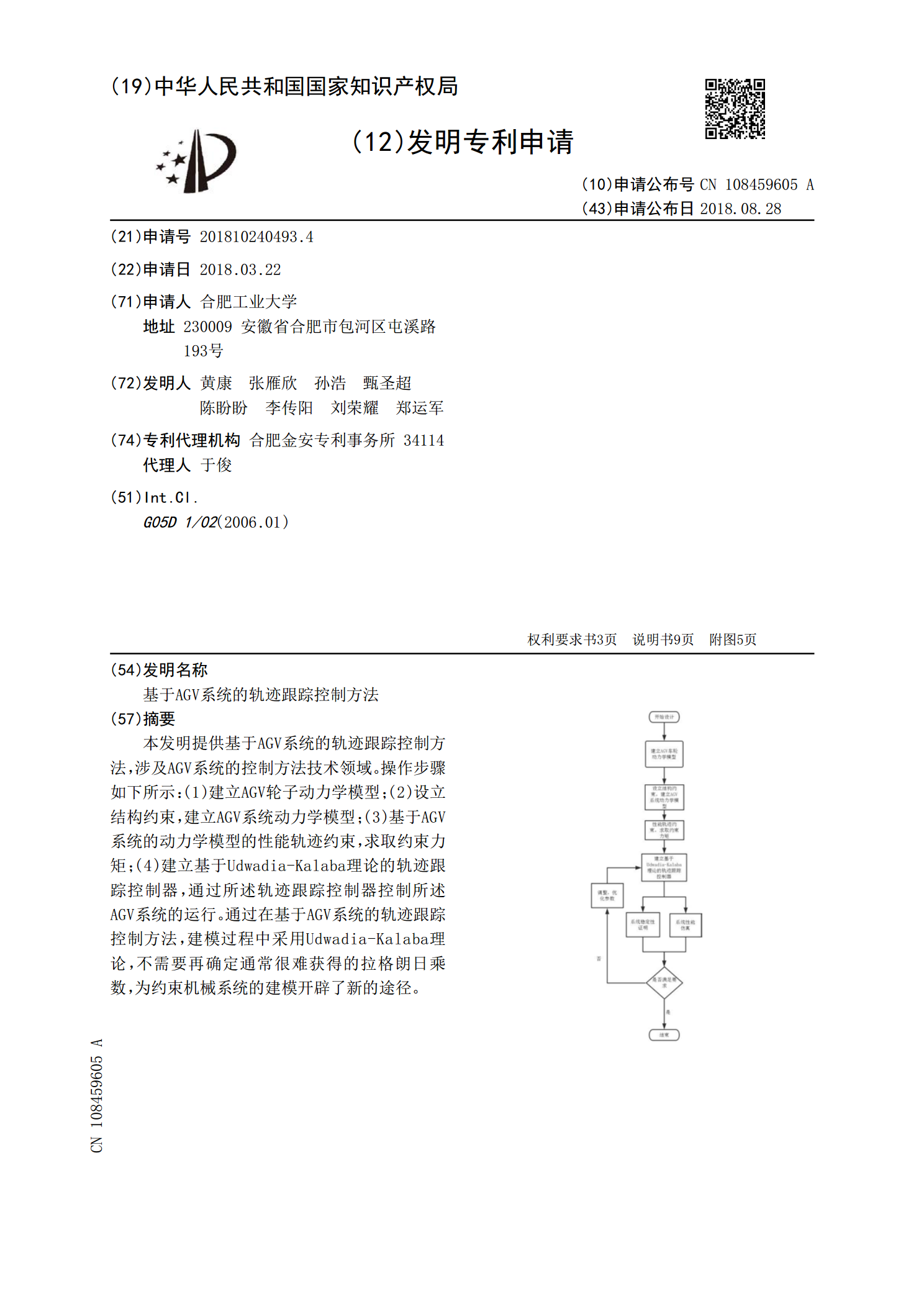
本发明提供基于AGV系统的轨迹跟踪控制方法,涉及AGV系统的控制方法技术领域。操作步骤如下所示:(1)建立AGV轮子动力学模型;(2)设立结构约束,建立AGV系统动力学模型;(3)基于AGV系统的动力学模型的性能轨迹约束,求取约束力矩;(4)建立基于Udwadia‑Kalaba理论的轨迹跟踪控制器,通过所述轨迹跟踪控制器控制所述AGV系统的运行。通过在基于AGV系统的轨迹跟踪控制方法,建模过程中采用Udwadia‑Kalaba理论,不需要再确定通常很难获得的拉格朗日乘数,为约束机械系统的建模开辟了新的途径
移动智能跟踪车.pdf
本发明属于机器人领域,具体为一种移动智能跟踪车。包括有上位机(1)、下位机(2)、车体(3)、云台(4)、摄像头(5)、语音模块(6)、云台驱动(7)、车轮驱动(8)、激光测距模块(9)。移动智能跟踪车可工作于三种模式,第一种模式为按存储模板跟踪,第二种模式为按模板选定框中内容跟踪,第三种模式为按运动目标检测结果跟踪,使用者利用语音指令进行选择。本发明可作为机场行李车或超市购物车使用。