
一种新型梯形臂.pdf

秀华****魔王


1/9

2/9

3/9

4/9

5/9

6/9

7/9

8/9

9/9
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

一种新型梯形臂.pdf
本发明公开了一种新型的梯形臂,集成此梯形臂能让汽车行驶于轨道之上,保护汽车不会脱轨,同时能在轨道弯曲时自动进行转弯换向。本发明的新型梯形臂包括梯形臂杆以及轨道挡轮,轨道挡轮固定安装在梯形臂杆的两端。

一种新型岩石臂.pdf
一种新型岩石臂,包括车体、大臂、小臂和松土器,大臂的顶端固定有两块凸板,两块凸板之间保留有可供斗杆油缸穿过的间隔,两块凸板上均铰接有动臂油缸,两个动臂油缸的活塞杆均与车体铰接,大臂与车体的铰接处到大臂与小臂的铰接处的距离为大臂与动臂油缸的铰接处到大臂与小臂的铰接处的距离的1.8‑2.0倍,大臂与车体的铰接处到大臂与动臂油缸的铰接处的距离为大臂与动臂油缸的铰接处到大臂与小臂的铰接处的距离的1.2‑1.4倍。本发明能够有效提升大臂的灵活性,且能够显著地降低动臂油缸的能耗,有利于降低生产成本和节约能源。

一种新型扭转臂.pdf
本发明提出一种新型扭转臂,包括扭转臂架体、基板、和扭转臂装置;基板形成有条形透孔,内侧面形成有包括直线段和弧形段的导向槽;扭转臂装置包括转动手臂、滑块、连接杆和驱动装置;连接杆与滑块枢接在一起,连接杆的长度大于直线段与条形透孔的间距。如此,本发明突破传统扭转臂的构造形式,驱动装置驱动转动手臂沿条形透孔移动,转动手臂首先通过连接杆带动滑块沿直线段移动,随着转动手臂的移动和滑块逐渐滑入弧形段,滑块会通过连接杆逐渐扳动转动手臂的转轴带动转动手臂扭转,克服传统扭转臂另需电机驱动扭转的复杂结构缺陷,与现有技术相比,

一种新型机械臂.pdf
本发明提供了一种新型机械臂,属于机器人技术领域。它解决了现有技术中不能根据工作环境够灵活的调节的问题。本新型机械臂包括通过铰链结构依次连接的数个臂体,在上级臂体上设置有轴孔,在轴孔底部的臂体内设置有电磁铁,在下级臂体上设置有与上级臂体轴孔转动配合的轴,所述轴为空心轴且具有磁性,磁极的方向与轴同向,一定位齿轮的轴可转动的配合在空心轴的空心内,定位齿轮的轴也具有磁性,磁极的方向与空心轴磁极的方向相反;在两相邻的定位齿轮之间啮合有驱动齿轮,所述驱动齿轮由设置在臂体上的电机驱动。本发明机械臂由多个臂体通过可控的铰
一种新型柔臂TBM.pdf
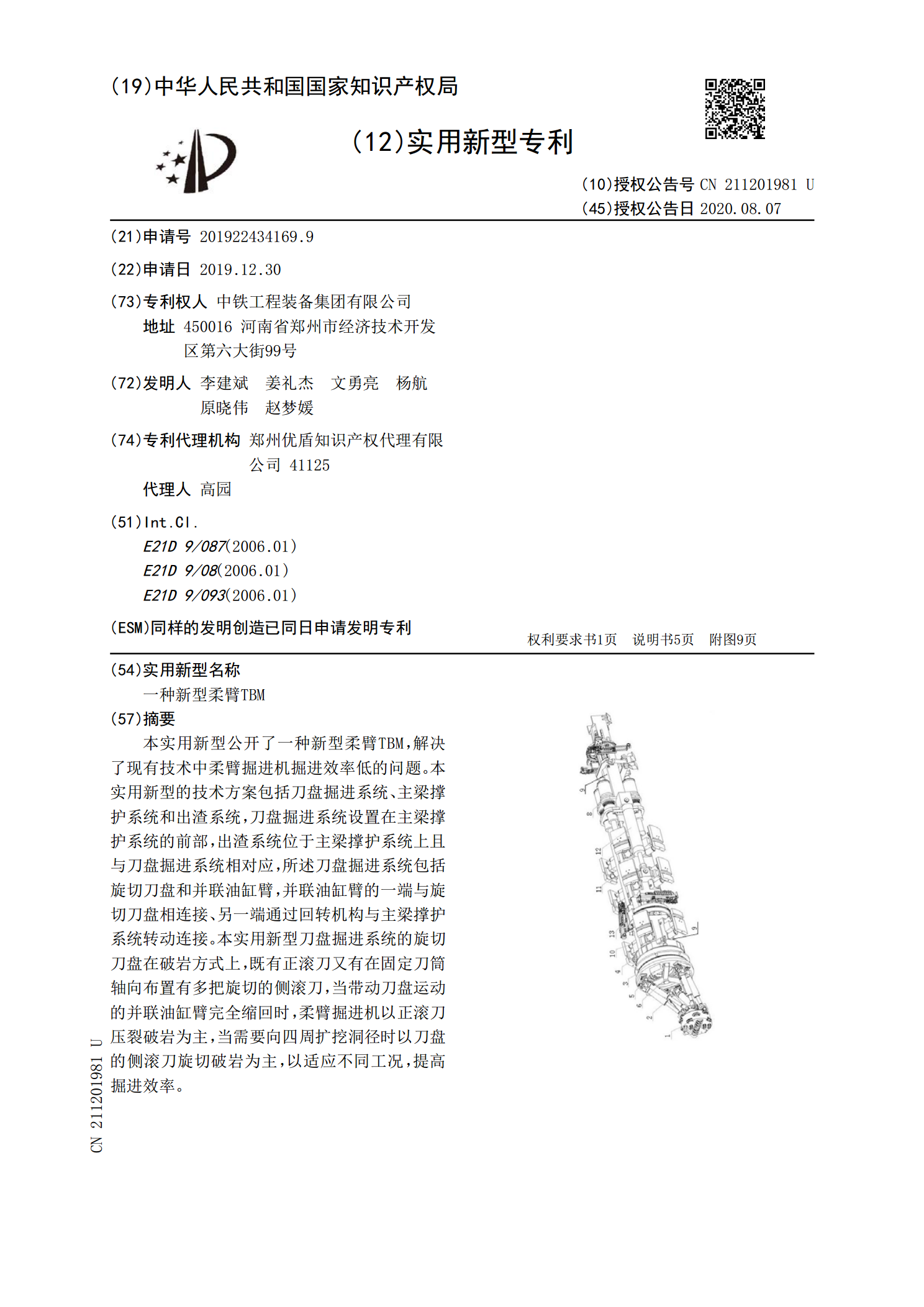
本实用新型公开了一种新型柔臂TBM,解决了现有技术中柔臂掘进机掘进效率低的问题。本实用新型的技术方案包括刀盘掘进系统、主梁撑护系统和出渣系统,刀盘掘进系统设置在主梁撑护系统的前部,出渣系统位于主梁撑护系统上且与刀盘掘进系统相对应,所述刀盘掘进系统包括旋切刀盘和并联油缸臂,并联油缸臂的一端与旋切刀盘相连接、另一端通过回转机构与主梁撑护系统转动连接。本实用新型刀盘掘进系统的旋切刀盘在破岩方式上,既有正滚刀又有在固定刀筒轴向布置有多把旋切的侧滚刀,当带动刀盘运动的并联油缸臂完全缩回时,柔臂掘进机以正滚刀压裂破岩