
太阳能爬壁机器人及其工作方法.pdf

一只****生物

1/8
2/8
3/8
4/8
5/8
6/8
7/8
8/8
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料
太阳能爬壁机器人及其工作方法.pdf
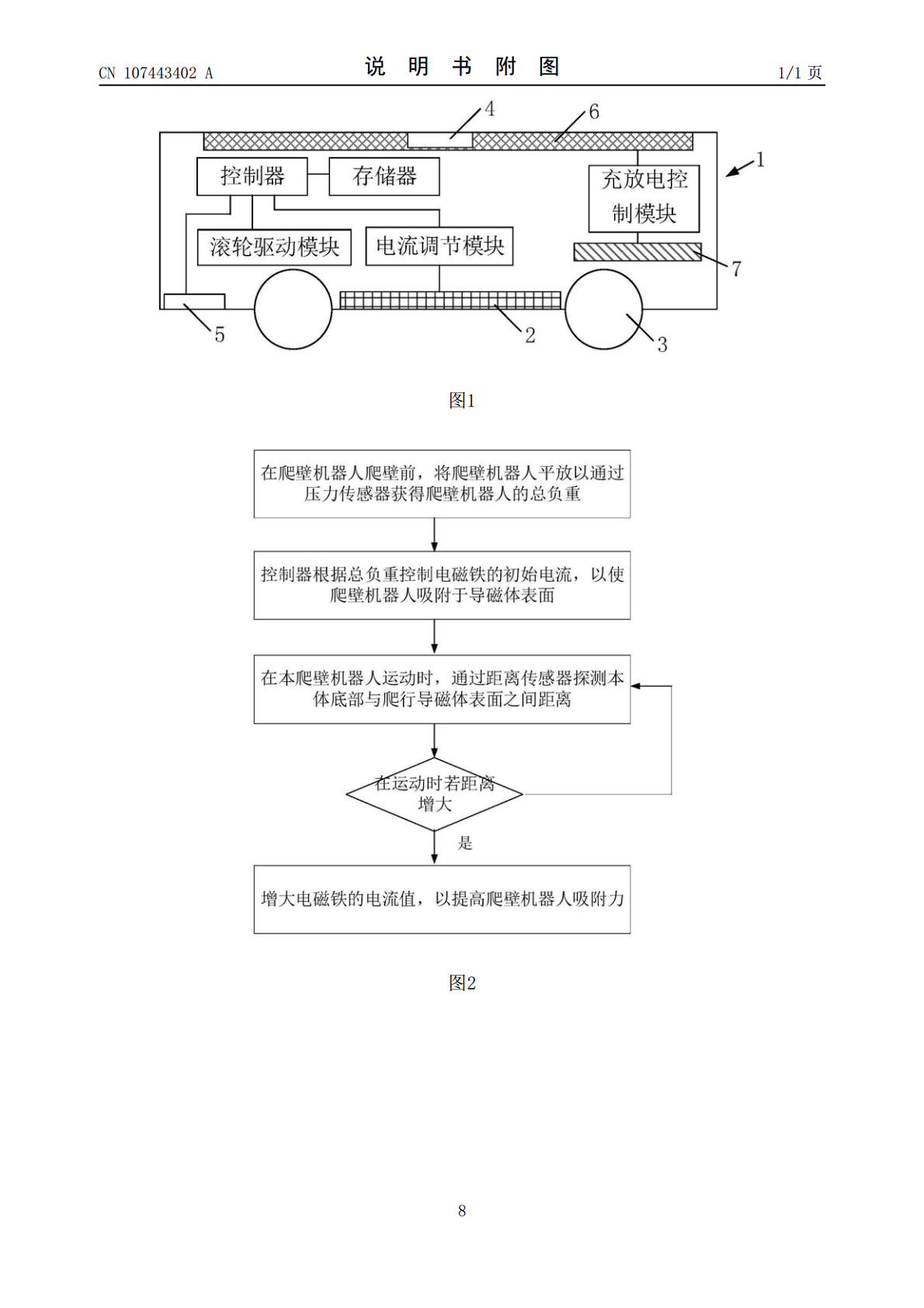
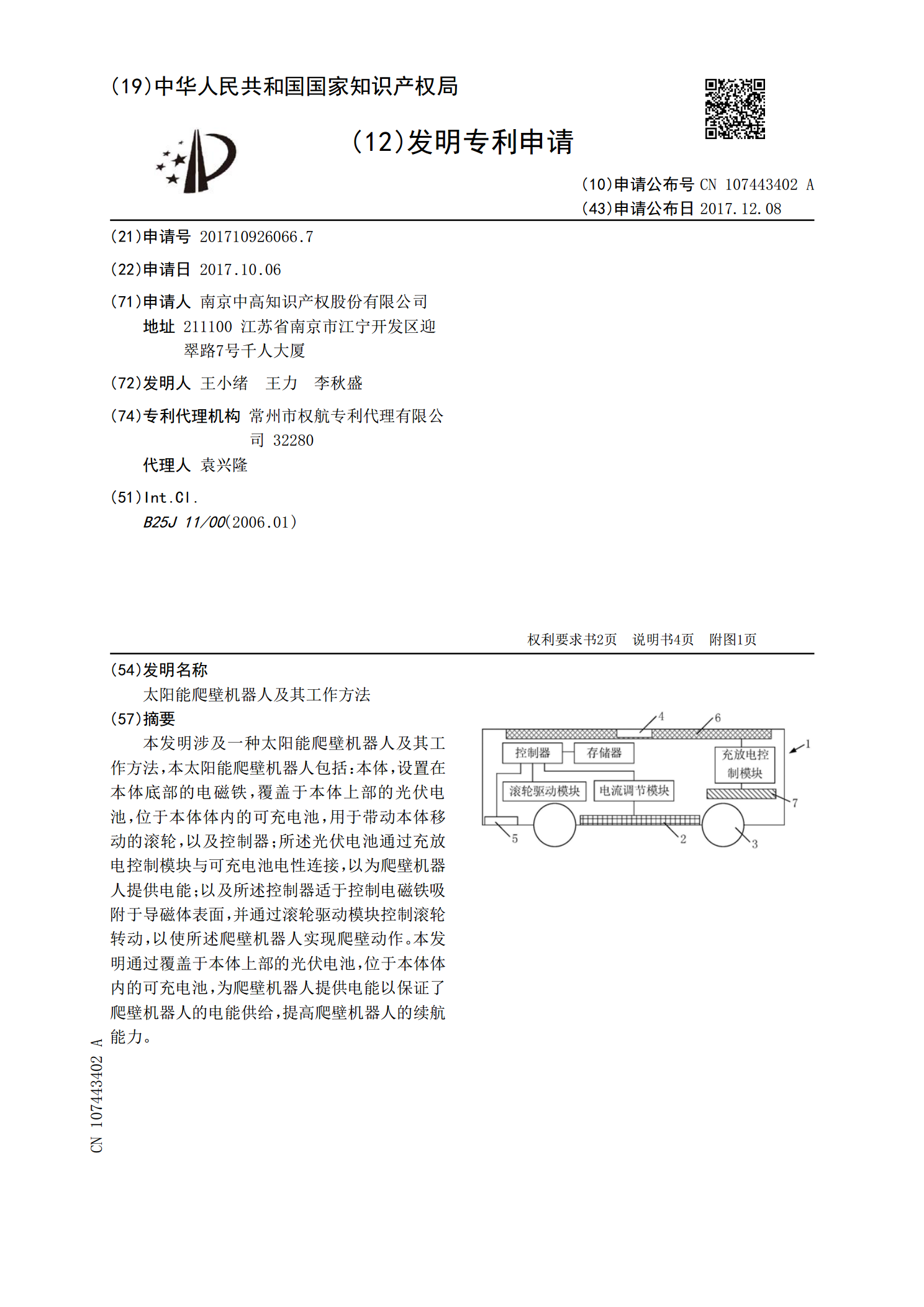
本发明涉及一种太阳能爬壁机器人及其工作方法,本太阳能爬壁机器人包括:本体,设置在本体底部的电磁铁,覆盖于本体上部的光伏电池,位于本体体内的可充电池,用于带动本体移动的滚轮,以及控制器;所述光伏电池通过充放电控制模块与可充电池电性连接,以为爬壁机器人提供电能;以及所述控制器适于控制电磁铁吸附于导磁体表面,并通过滚轮驱动模块控制滚轮转动,以使所述爬壁机器人实现爬壁动作。本发明通过覆盖于本体上部的光伏电池,位于本体体内的可充电池,为爬壁机器人提供电能以保证了爬壁机器人的电能供给,提高爬壁机器人的续航能力。
轮式爬壁机器人及其工作方法.pdf
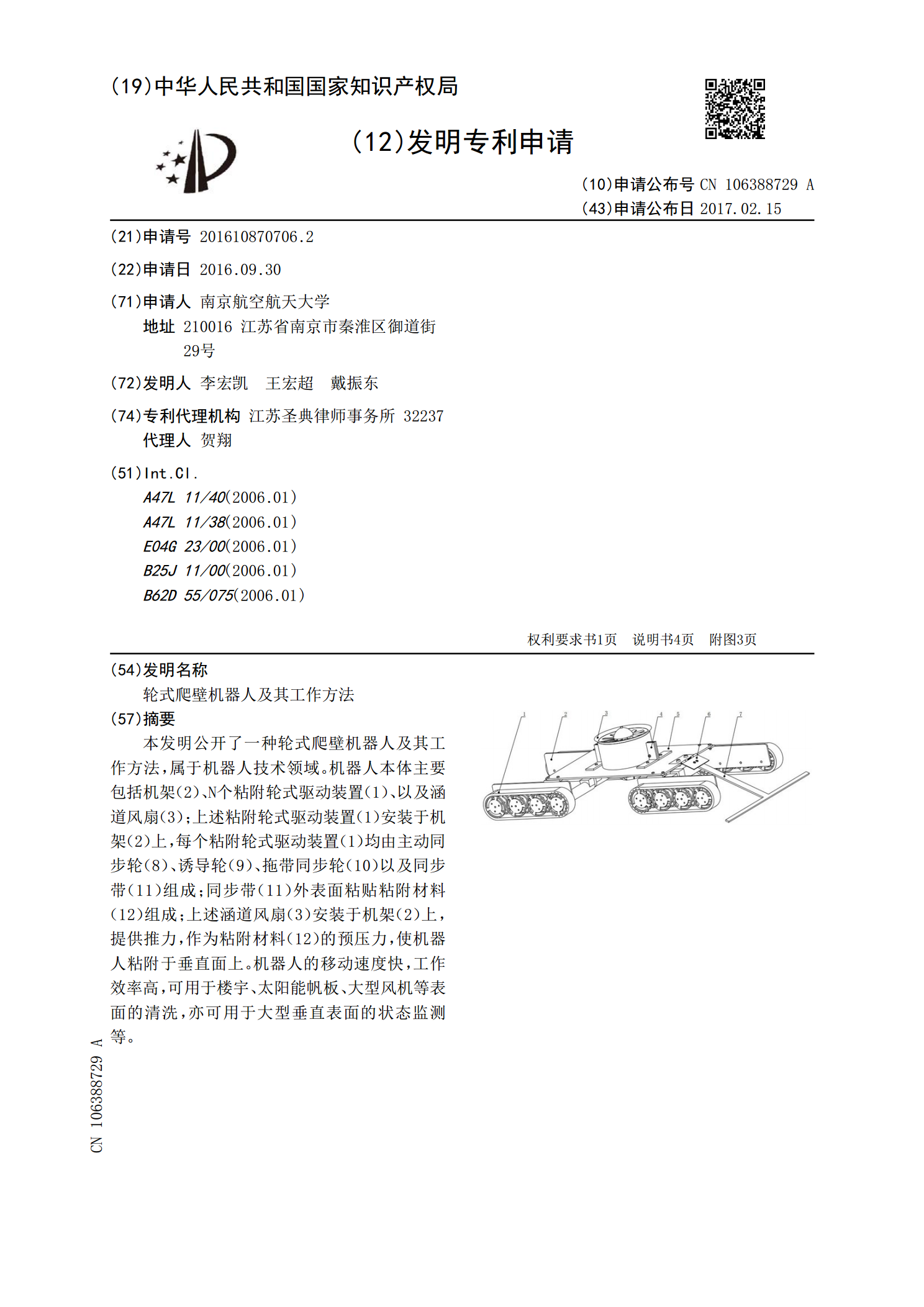
本发明公开了一种轮式爬壁机器人及其工作方法,属于机器人技术领域。机器人本体主要包括机架(2)、N个粘附轮式驱动装置(1)、以及涵道风扇(3);上述粘附轮式驱动装置(1)安装于机架(2)上,每个粘附轮式驱动装置(1)均由主动同步轮(8)、诱导轮(9)、拖带同步轮(10)以及同步带(11)组成;同步带(11)外表面粘贴粘附材料(12)组成;上述涵道风扇(3)安装于机架(2)上,提供推力,作为粘附材料(12)的预压力,使机器人粘附于垂直面上。机器人的移动速度快,工作效率高,可用于楼宇、太阳能帆板、大型风机等表面
磁吸式爬壁机器人及其工作方法.pdf
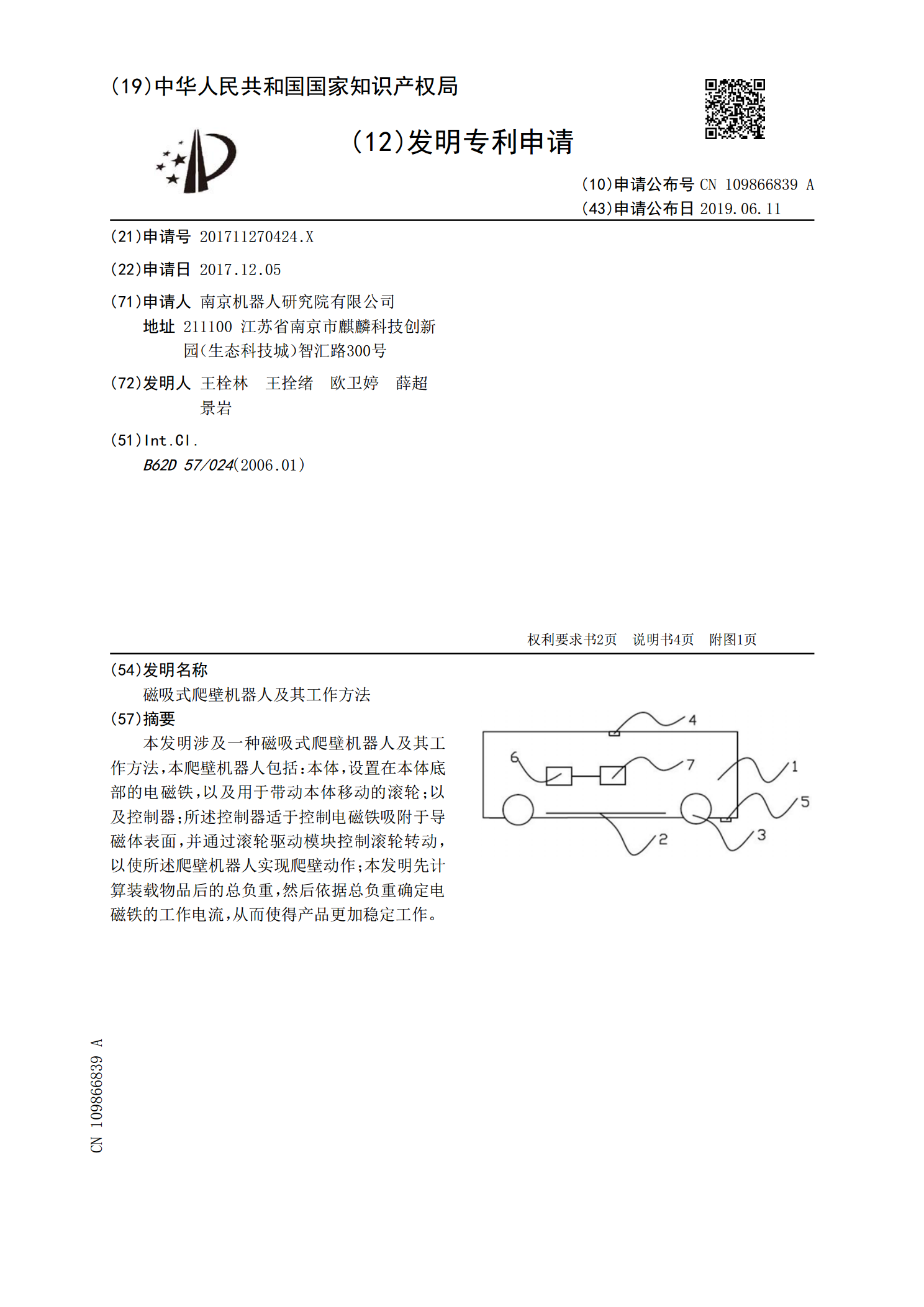
本发明涉及一种磁吸式爬壁机器人及其工作方法,本爬壁机器人包括:本体,设置在本体底部的电磁铁,以及用于带动本体移动的滚轮;以及控制器;所述控制器适于控制电磁铁吸附于导磁体表面,并通过滚轮驱动模块控制滚轮转动,以使所述爬壁机器人实现爬壁动作;本发明先计算装载物品后的总负重,然后依据总负重确定电磁铁的工作电流,从而使得产品更加稳定工作。
一种爬壁式机器人及其工作方法.pdf
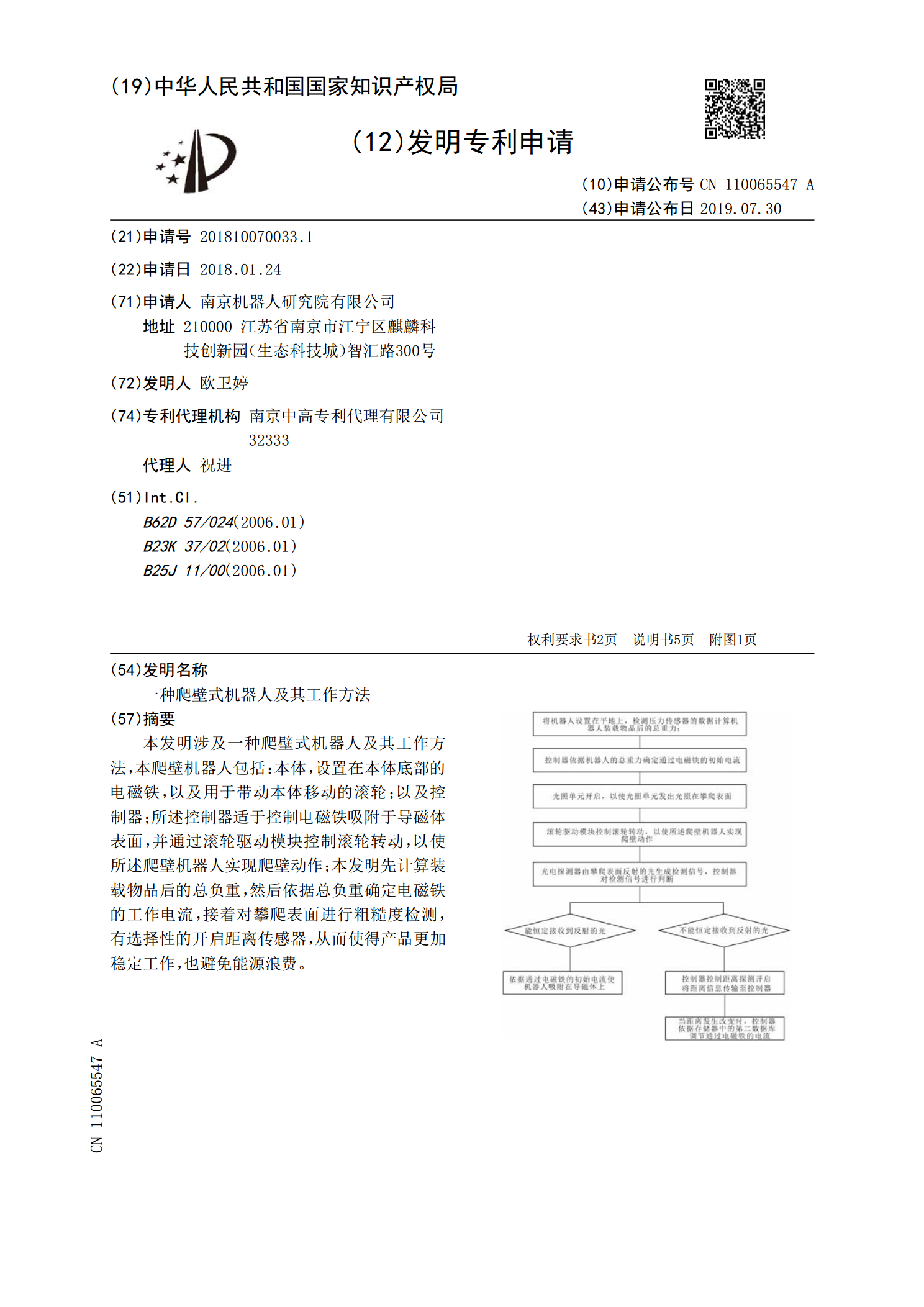
本发明涉及一种爬壁式机器人及其工作方法,本爬壁机器人包括:本体,设置在本体底部的电磁铁,以及用于带动本体移动的滚轮;以及控制器;所述控制器适于控制电磁铁吸附于导磁体表面,并通过滚轮驱动模块控制滚轮转动,以使所述爬壁机器人实现爬壁动作;本发明先计算装载物品后的总负重,然后依据总负重确定电磁铁的工作电流,接着对攀爬表面进行粗糙度检测,有选择性的开启距离传感器,从而使得产品更加稳定工作,也避免能源浪费。
多功能爬壁机器人底盘及机器人、工作方法.pdf
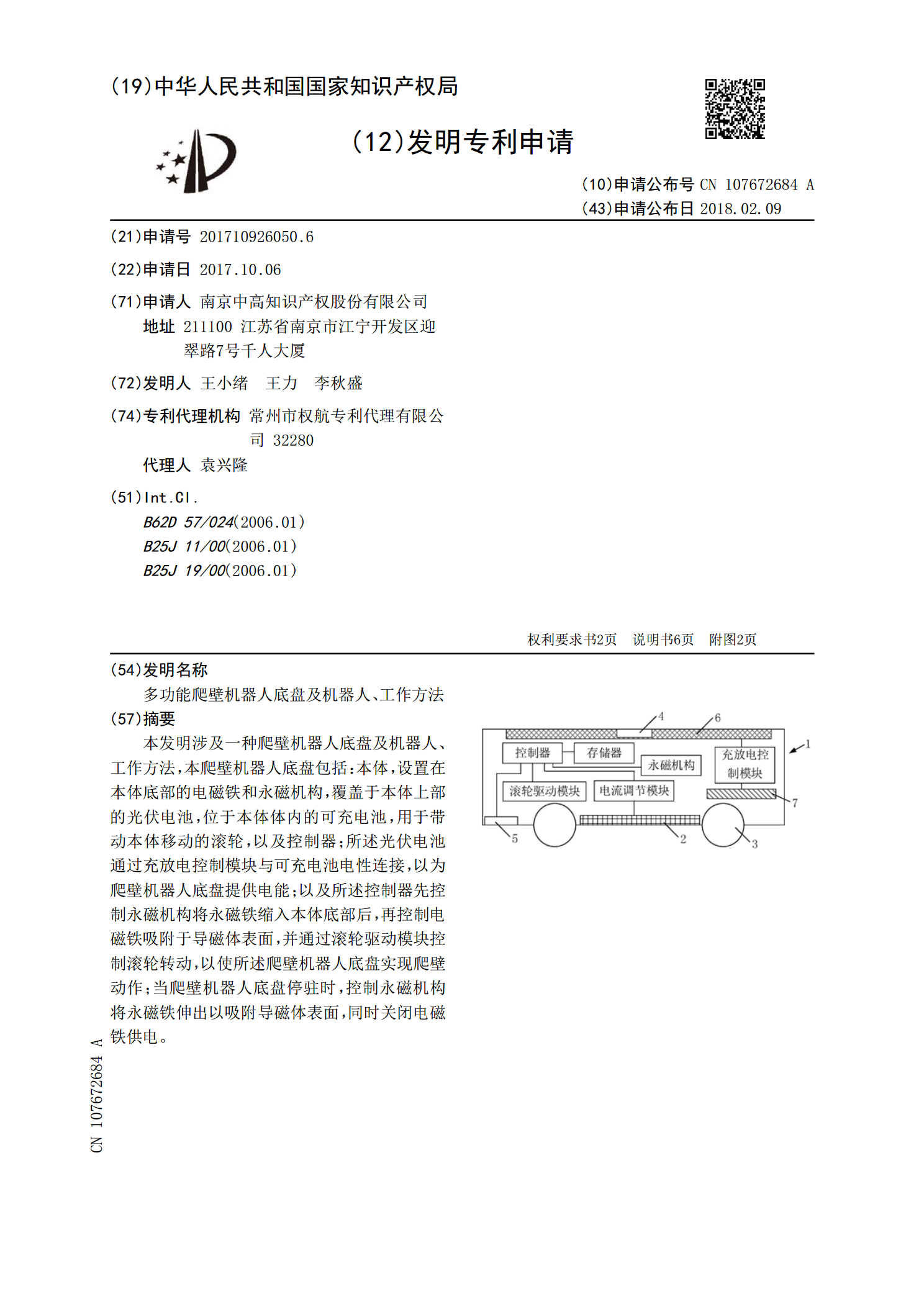
本发明涉及一种爬壁机器人底盘及机器人、工作方法,本爬壁机器人底盘包括:本体,设置在本体底部的电磁铁和永磁机构,覆盖于本体上部的光伏电池,位于本体体内的可充电池,用于带动本体移动的滚轮,以及控制器;所述光伏电池通过充放电控制模块与可充电池电性连接,以为爬壁机器人底盘提供电能;以及所述控制器先控制永磁机构将永磁铁缩入本体底部后,再控制电磁铁吸附于导磁体表面,并通过滚轮驱动模块控制滚轮转动,以使所述爬壁机器人底盘实现爬壁动作;当爬壁机器人底盘停驻时,控制永磁机构将永磁铁伸出以吸附导磁体表面,同时关闭电磁铁供电。