
一种基于点云平面轮廓匹配的货物托盘检测方法及系统.pdf

Ro****44

1/10
2/10
3/10

4/10
5/10
6/10
7/10
8/10
9/10

10/10
亲,该文档总共16页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
一种基于点云平面轮廓匹配的货物托盘检测方法及系统.pdf
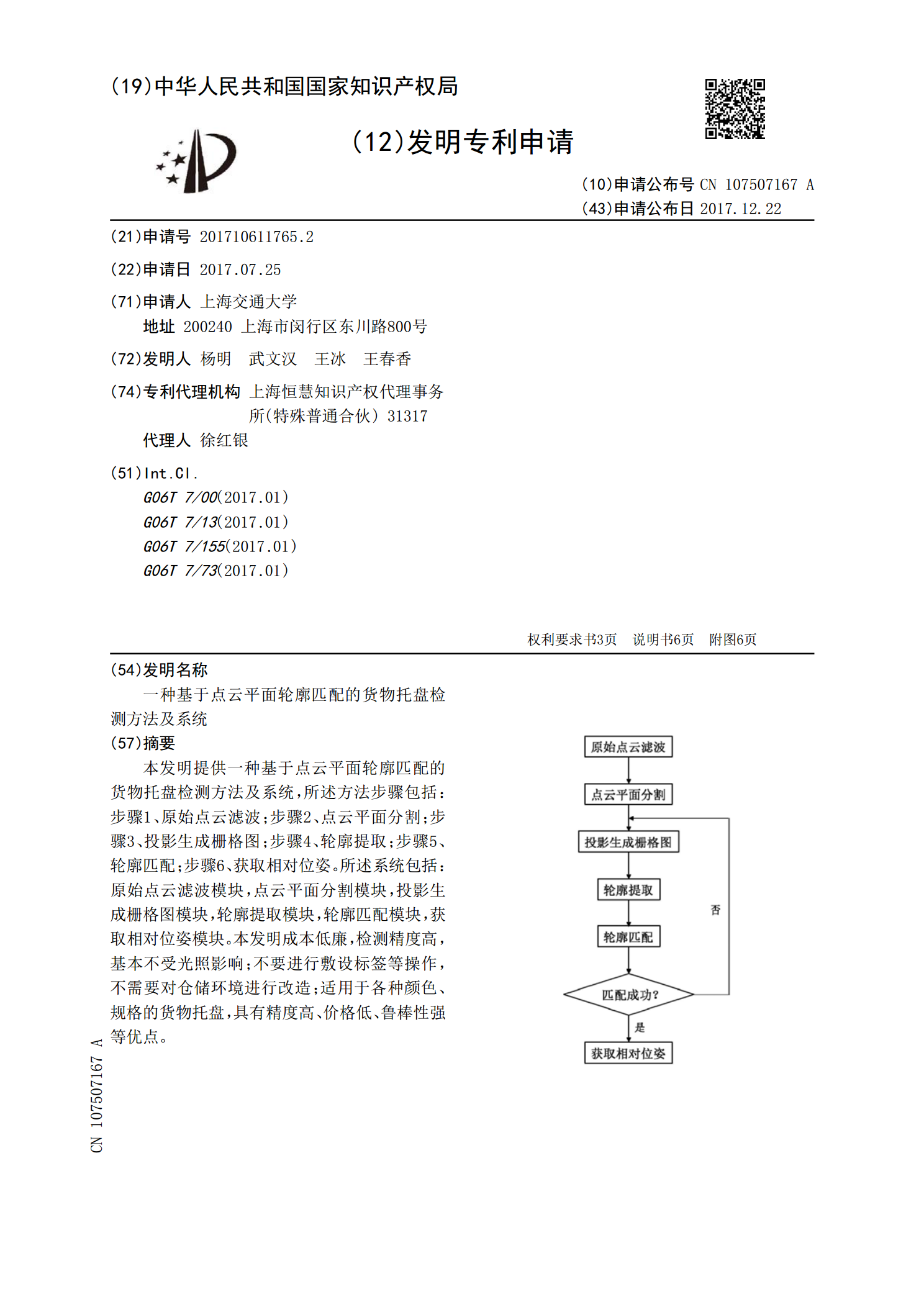
本发明提供一种基于点云平面轮廓匹配的货物托盘检测方法及系统,所述方法步骤包括:步骤1、原始点云滤波;步骤2、点云平面分割;步骤3、投影生成栅格图;步骤4、轮廓提取;步骤5、轮廓匹配;步骤6、获取相对位姿。所述系统包括:原始点云滤波模块,点云平面分割模块,投影生成栅格图模块,轮廓提取模块,轮廓匹配模块,获取相对位姿模块。本发明成本低廉,检测精度高,基本不受光照影响;不要进行敷设标签等操作,不需要对仓储环境进行改造;适用于各种颜色、规格的货物托盘,具有精度高、价格低、鲁棒性强等优点。
一种基于点云模型的面轮廓度精确检测的方法及系统.pdf
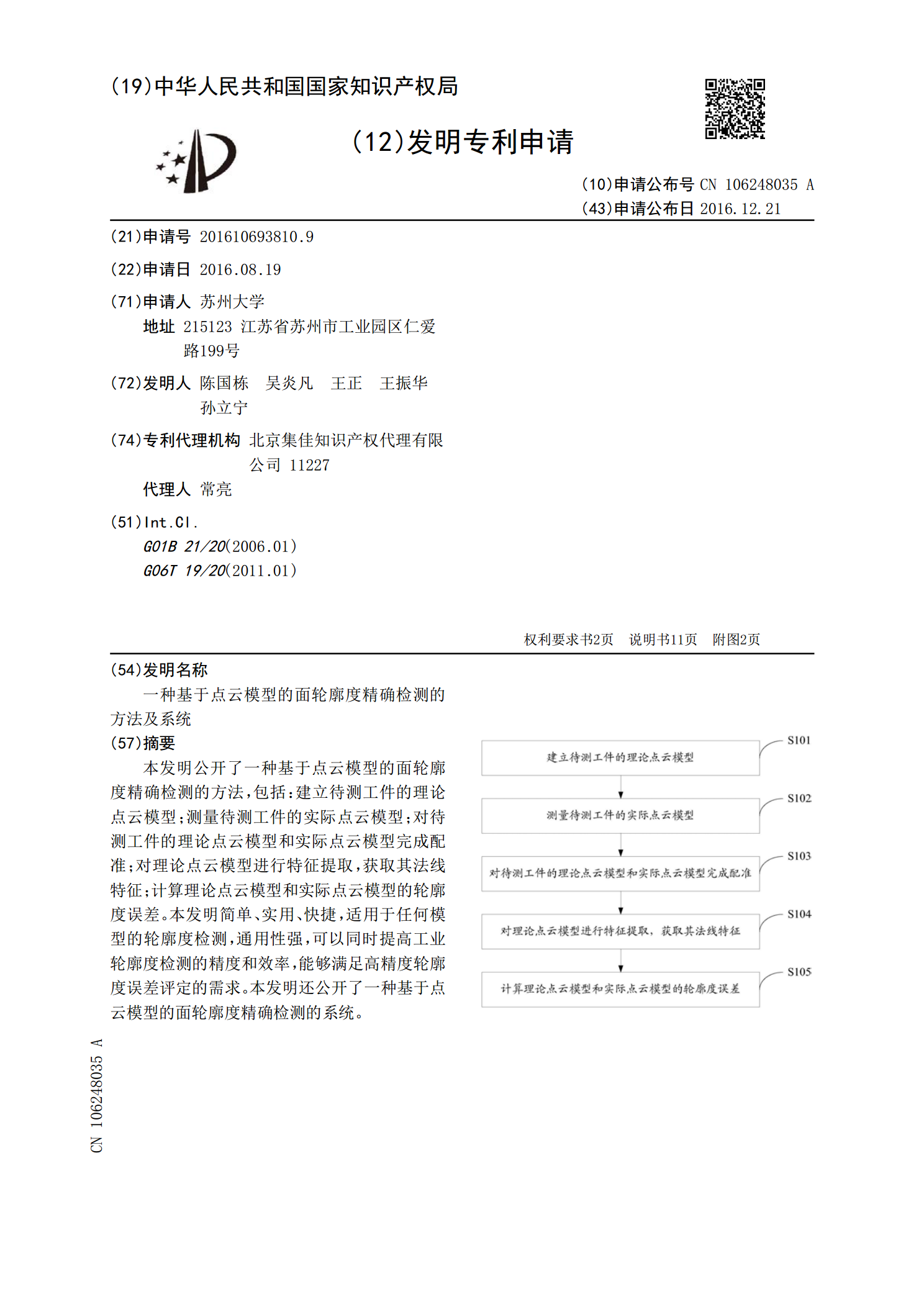
本发明公开了一种基于点云模型的面轮廓度精确检测的方法,包括:建立待测工件的理论点云模型;测量待测工件的实际点云模型;对待测工件的理论点云模型和实际点云模型完成配准;对理论点云模型进行特征提取,获取其法线特征;计算理论点云模型和实际点云模型的轮廓度误差。本发明简单、实用、快捷,适用于任何模型的轮廓度检测,通用性强,可以同时提高工业轮廓度检测的精度和效率,能够满足高精度轮廓度误差评定的需求。本发明还公开了一种基于点云模型的面轮廓度精确检测的系统。
一种基于三维点云的车厢轮廓检测方法及系统.pdf
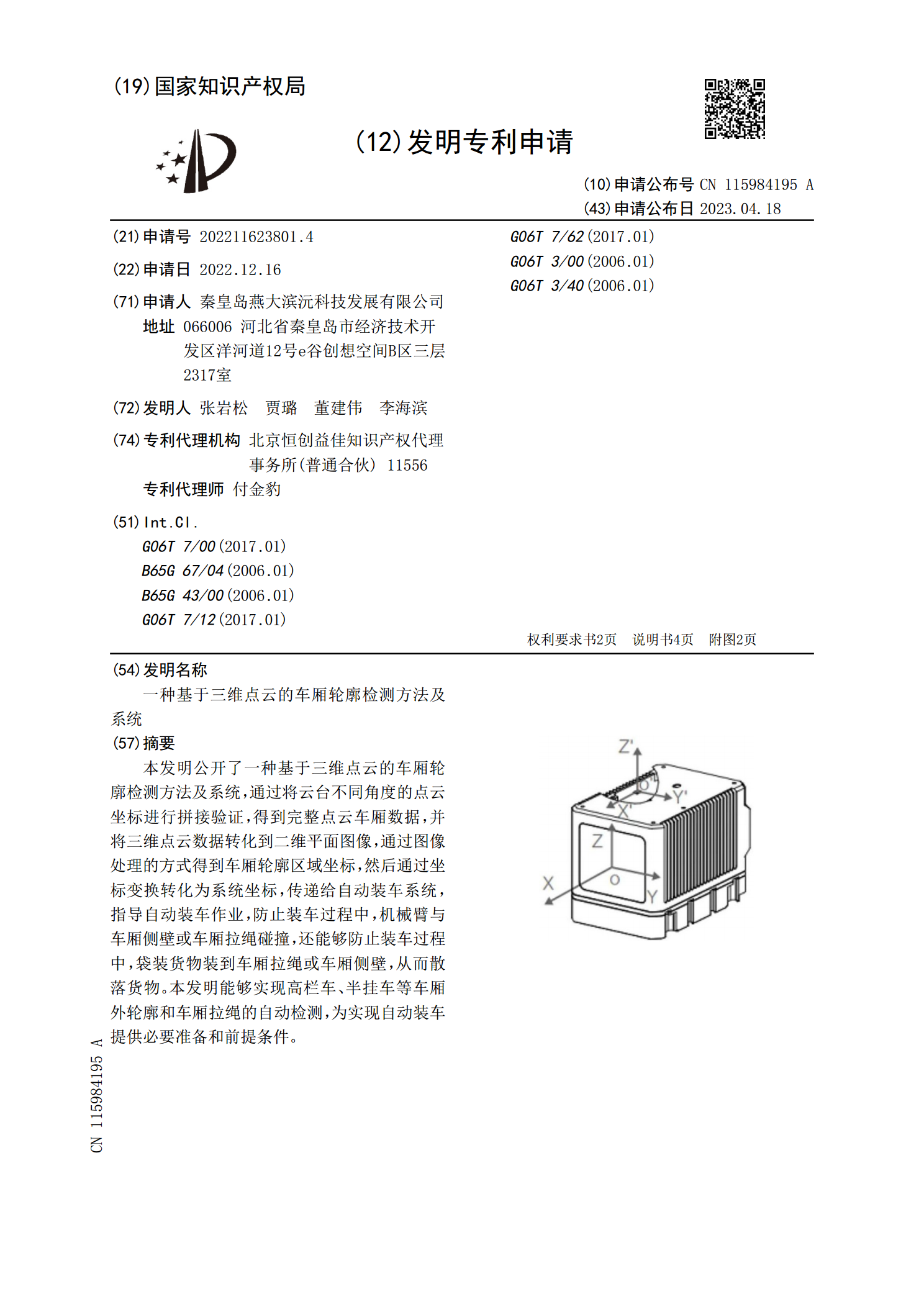
本发明公开了一种基于三维点云的车厢轮廓检测方法及系统,通过将云台不同角度的点云坐标进行拼接验证,得到完整点云车厢数据,并将三维点云数据转化到二维平面图像,通过图像处理的方式得到车厢轮廓区域坐标,然后通过坐标变换转化为系统坐标,传递给自动装车系统,指导自动装车作业,防止装车过程中,机械臂与车厢侧壁或车厢拉绳碰撞,还能够防止装车过程中,袋装货物装到车厢拉绳或车厢侧壁,从而散落货物。本发明能够实现高栏车、半挂车等车厢外轮廓和车厢拉绳的自动检测,为实现自动装车提供必要准备和前提条件。
一种基于点云的古建筑轮廓提取方法及系统.pdf
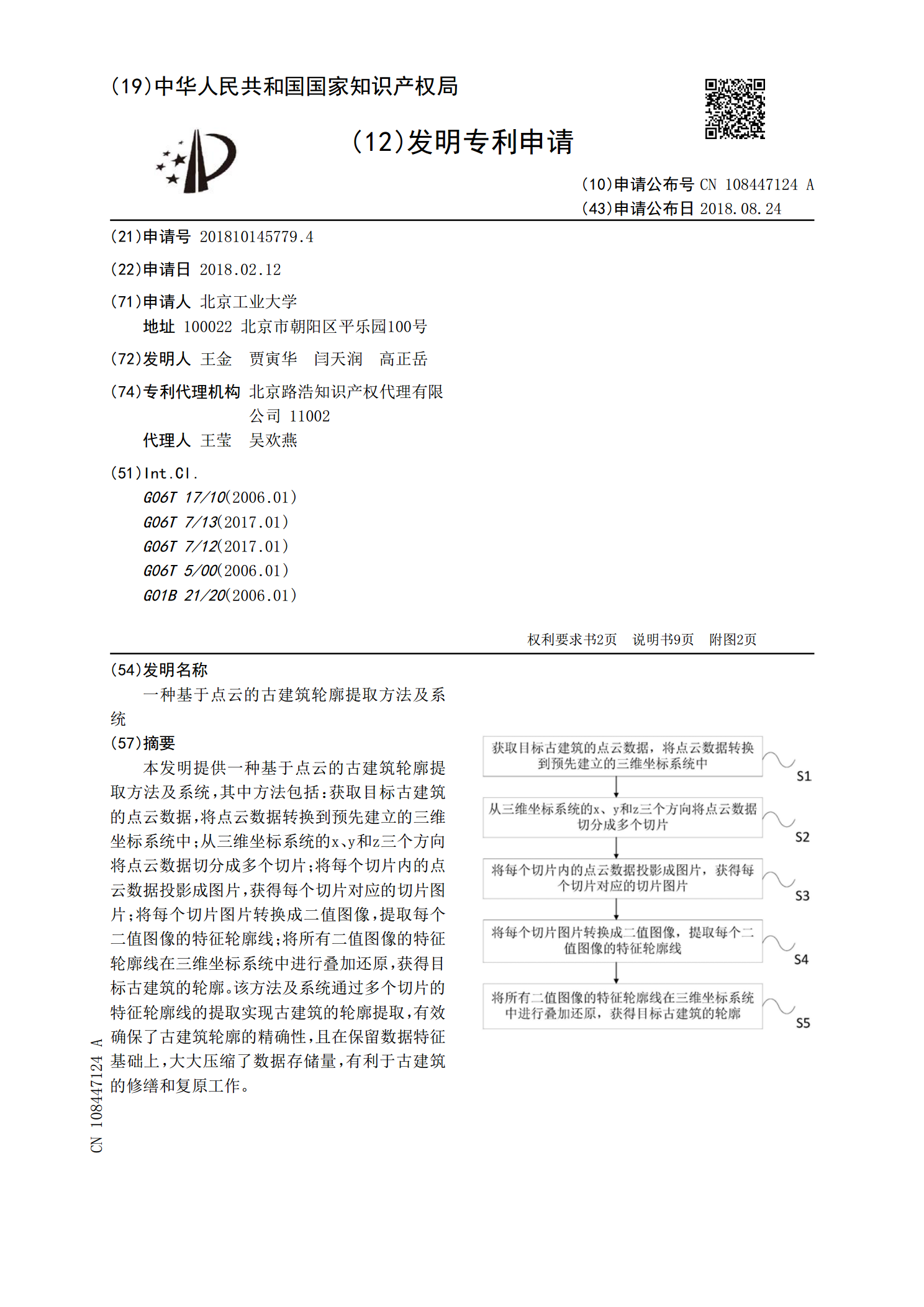
本发明提供一种基于点云的古建筑轮廓提取方法及系统,其中方法包括:获取目标古建筑的点云数据,将点云数据转换到预先建立的三维坐标系统中;从三维坐标系统的x、y和z三个方向将点云数据切分成多个切片;将每个切片内的点云数据投影成图片,获得每个切片对应的切片图片;将每个切片图片转换成二值图像,提取每个二值图像的特征轮廓线;将所有二值图像的特征轮廓线在三维坐标系统中进行叠加还原,获得目标古建筑的轮廓。该方法及系统通过多个切片的特征轮廓线的提取实现古建筑的轮廓提取,有效确保了古建筑轮廓的精确性,且在保留数据特征基础上,
一种基于轮廓特征点匹配的二维形状检索方法及系统.pdf
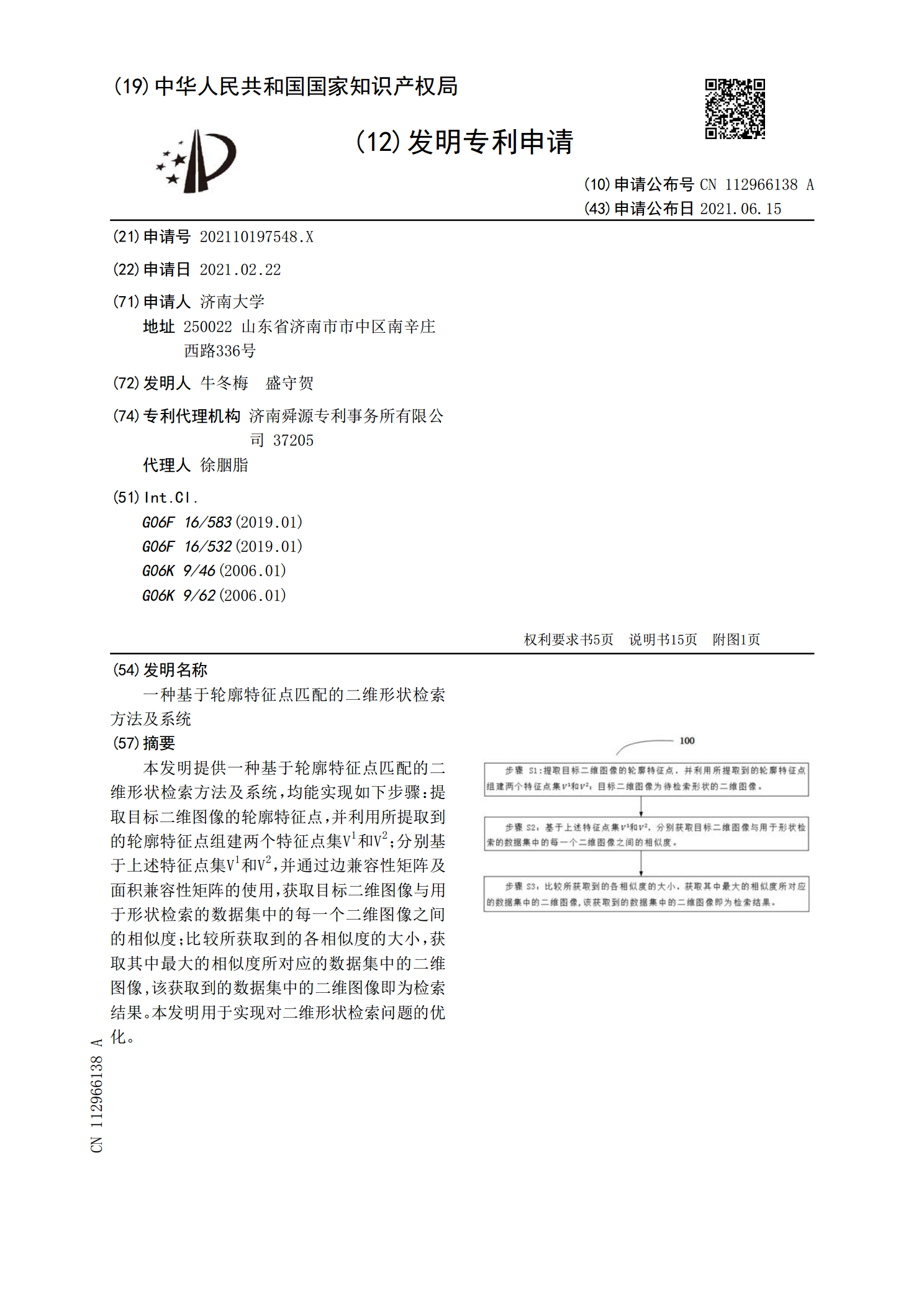
本发明提供一种基于轮廓特征点匹配的二维形状检索方法及系统,均能实现如下步骤:提取目标二维图像的轮廓特征点,并利用所提取到的轮廓特征点组建两个特征点集V