
一种基于轮廓特征点匹配的二维形状检索方法及系统.pdf

代瑶****zy

1/10

2/10
3/10
4/10
5/10
6/10
7/10
8/10
9/10
10/10
亲,该文档总共22页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
一种基于轮廓特征点匹配的二维形状检索方法及系统.pdf
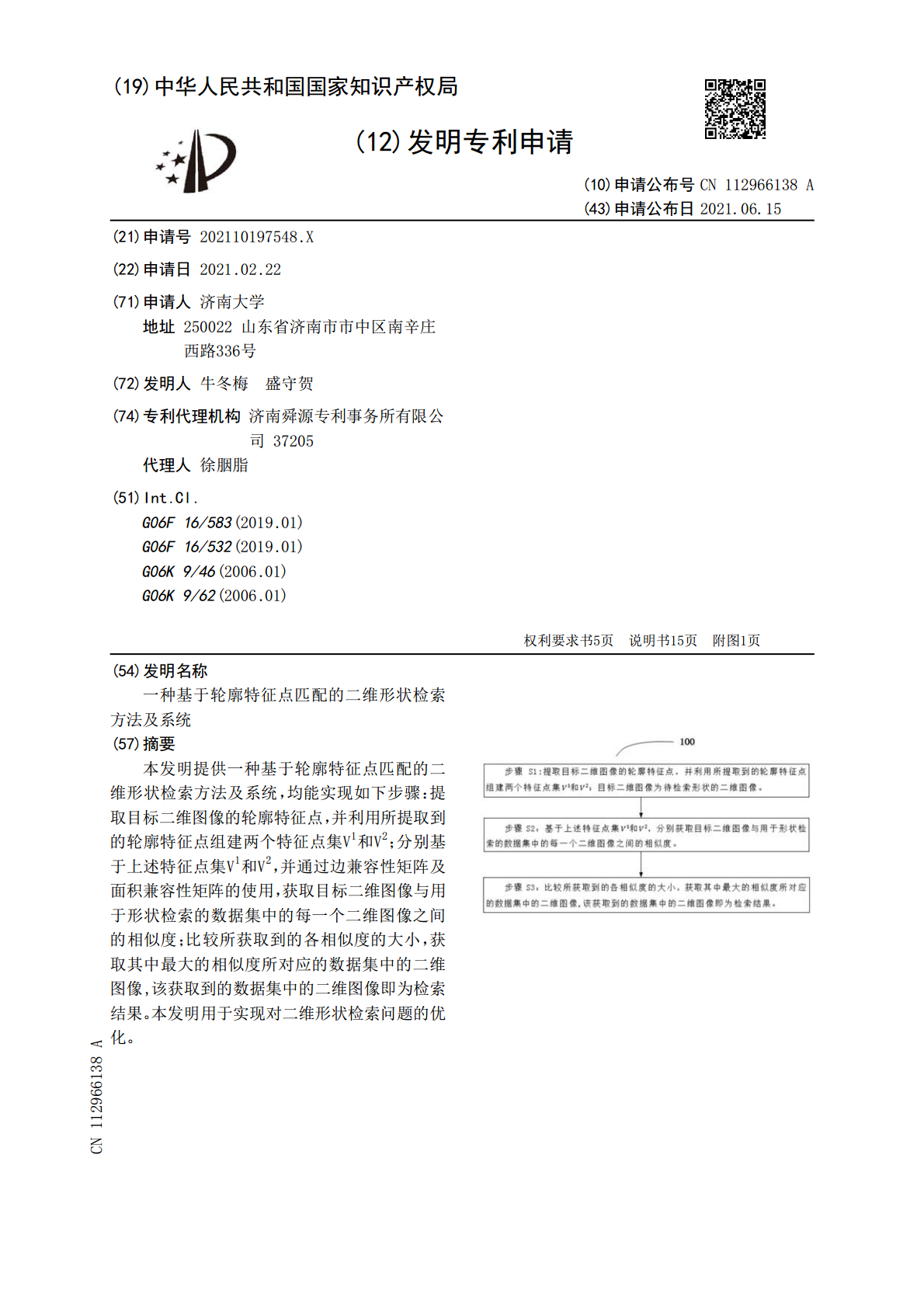
本发明提供一种基于轮廓特征点匹配的二维形状检索方法及系统,均能实现如下步骤:提取目标二维图像的轮廓特征点,并利用所提取到的轮廓特征点组建两个特征点集V
一种基于点特征和轮廓特征融合的图像匹配定位方法.pdf
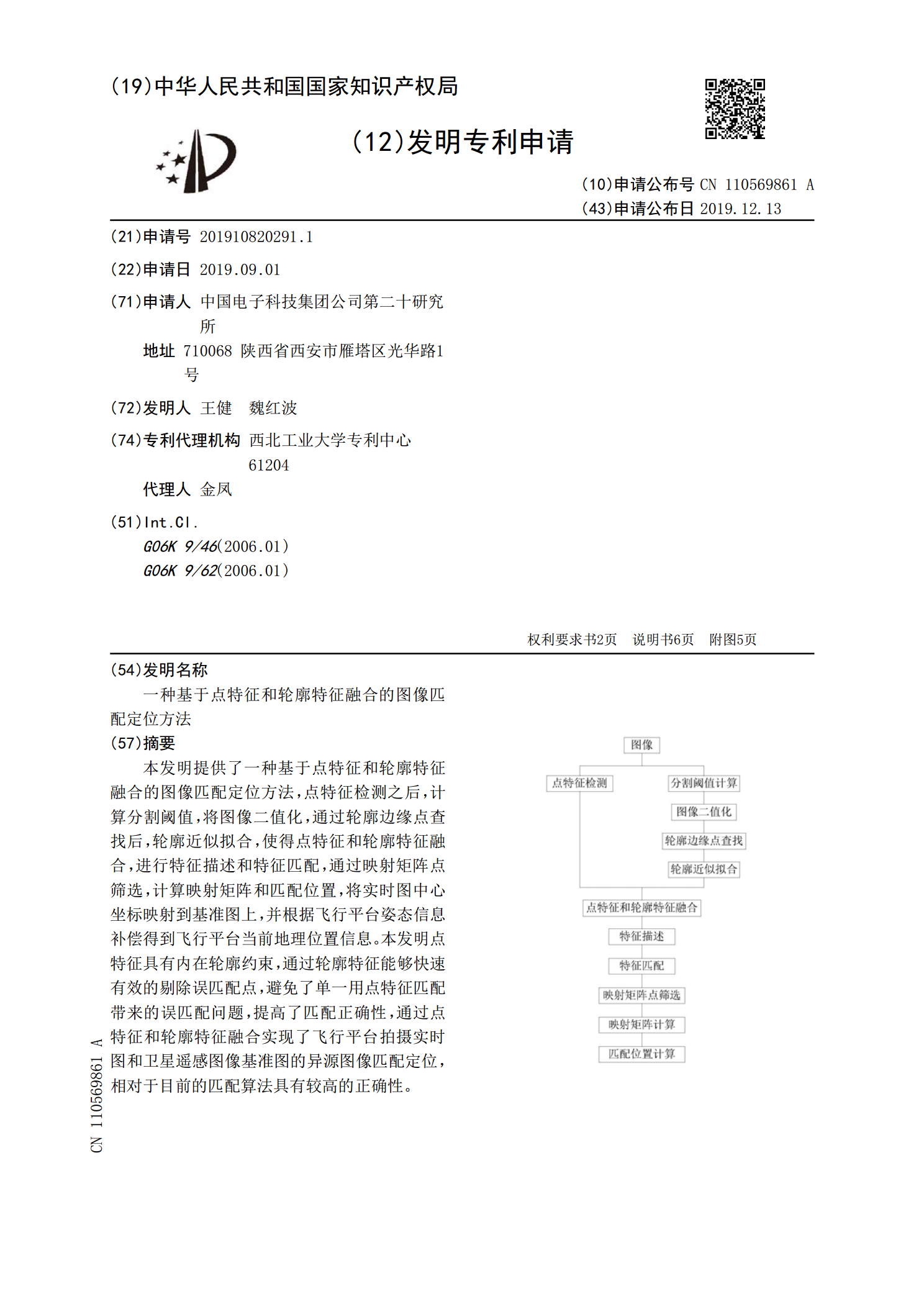
本发明提供了一种基于点特征和轮廓特征融合的图像匹配定位方法,点特征检测之后,计算分割阈值,将图像二值化,通过轮廓边缘点查找后,轮廓近似拟合,使得点特征和轮廓特征融合,进行特征描述和特征匹配,通过映射矩阵点筛选,计算映射矩阵和匹配位置,将实时图中心坐标映射到基准图上,并根据飞行平台姿态信息补偿得到飞行平台当前地理位置信息。本发明点特征具有内在轮廓约束,通过轮廓特征能够快速有效的剔除误匹配点,避免了单一用点特征匹配带来的误匹配问题,提高了匹配正确性,通过点特征和轮廓特征融合实现了飞行平台拍摄实时图和卫星遥感图
一种基于手绘轮廓图匹配的图像检索方法及系统.pdf
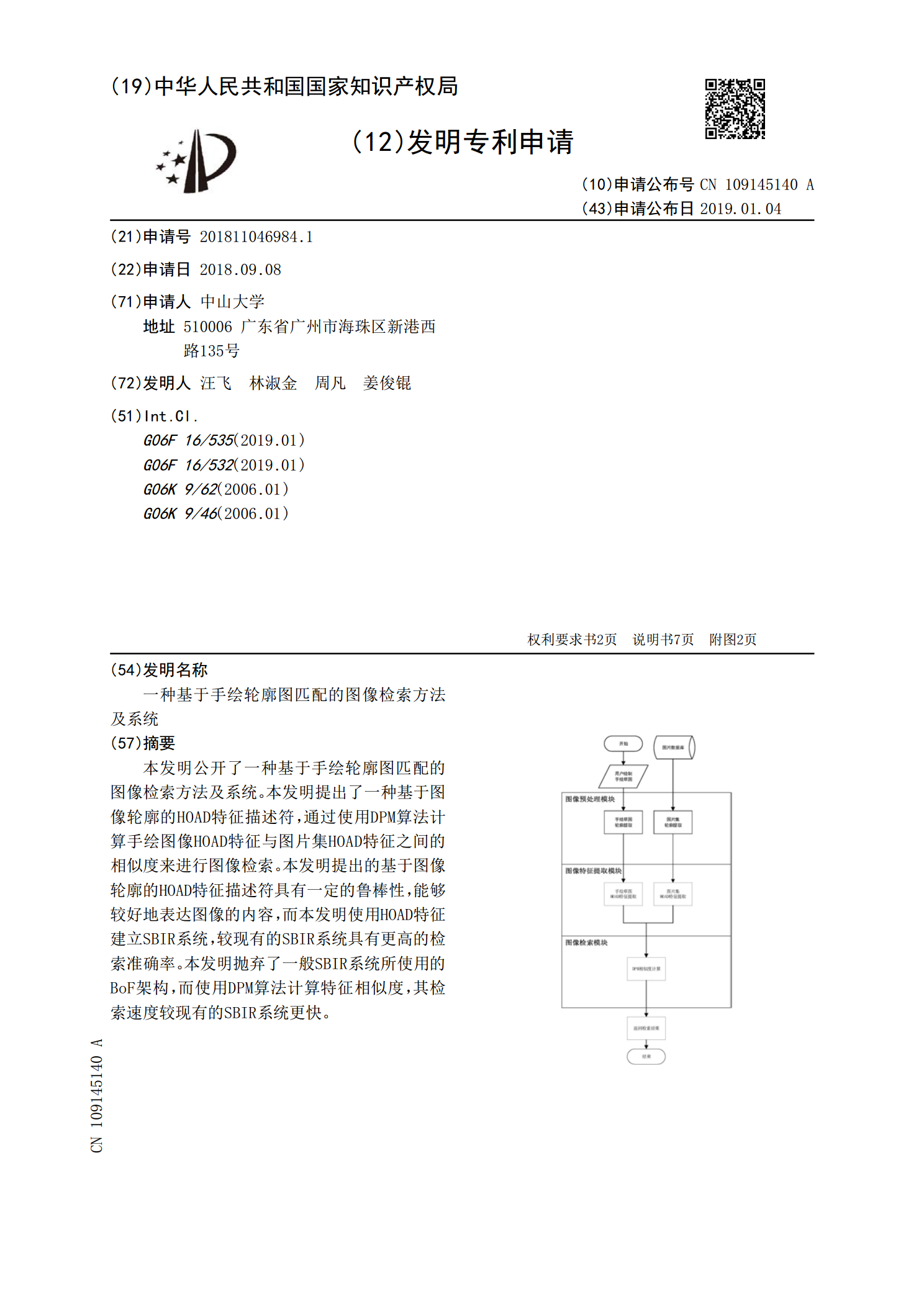
本发明公开了一种基于手绘轮廓图匹配的图像检索方法及系统。本发明提出了一种基于图像轮廓的HOAD特征描述符,通过使用DPM算法计算手绘图像HOAD特征与图片集HOAD特征之间的相似度来进行图像检索。本发明提出的基于图像轮廓的HOAD特征描述符具有一定的鲁棒性,能够较好地表达图像的内容,而本发明使用HOAD特征建立SBIR系统,较现有的SBIR系统具有更高的检索准确率。本发明抛弃了一般SBIR系统所使用的BoF架构,而使用DPM算法计算特征相似度,其检索速度较现有的SBIR系统更快。
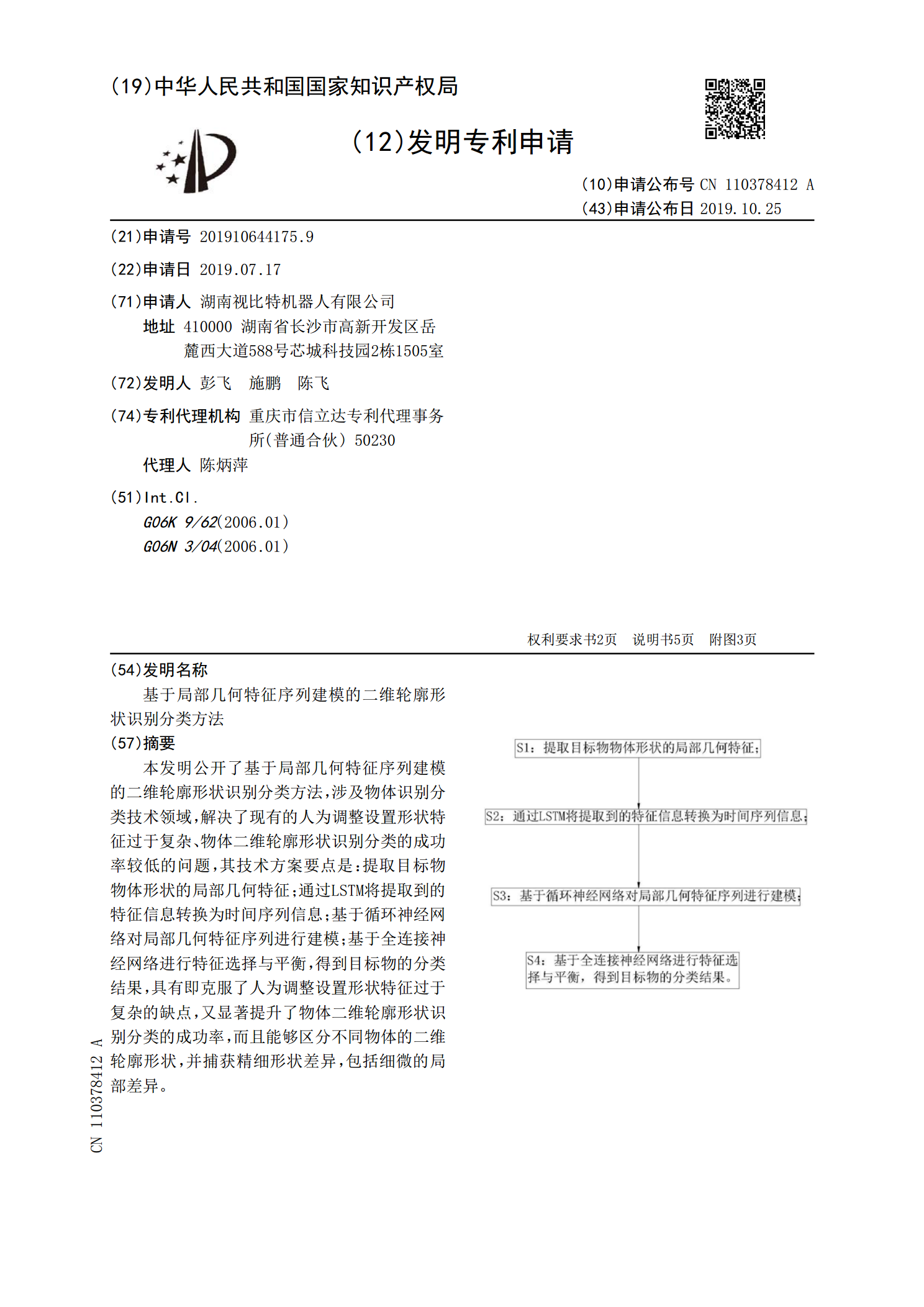
基于局部几何特征序列建模的二维轮廓形状识别分类方法.pdf
本发明公开了基于局部几何特征序列建模的二维轮廓形状识别分类方法,涉及物体识别分类技术领域,解决了现有的人为调整设置形状特征过于复杂、物体二维轮廓形状识别分类的成功率较低的问题,其技术方案要点是:提取目标物物体形状的局部几何特征;通过LSTM将提取到的特征信息转换为时间序列信息;基于循环神经网络对局部几何特征序列进行建模;基于全连接神经网络进行特征选择与平衡,得到目标物的分类结果,具有即克服了人为调整设置形状特征过于复杂的缺点,又显著提升了物体二维轮廓形状识别分类的成功率,而且能够区分不同物体的二维轮廓形状
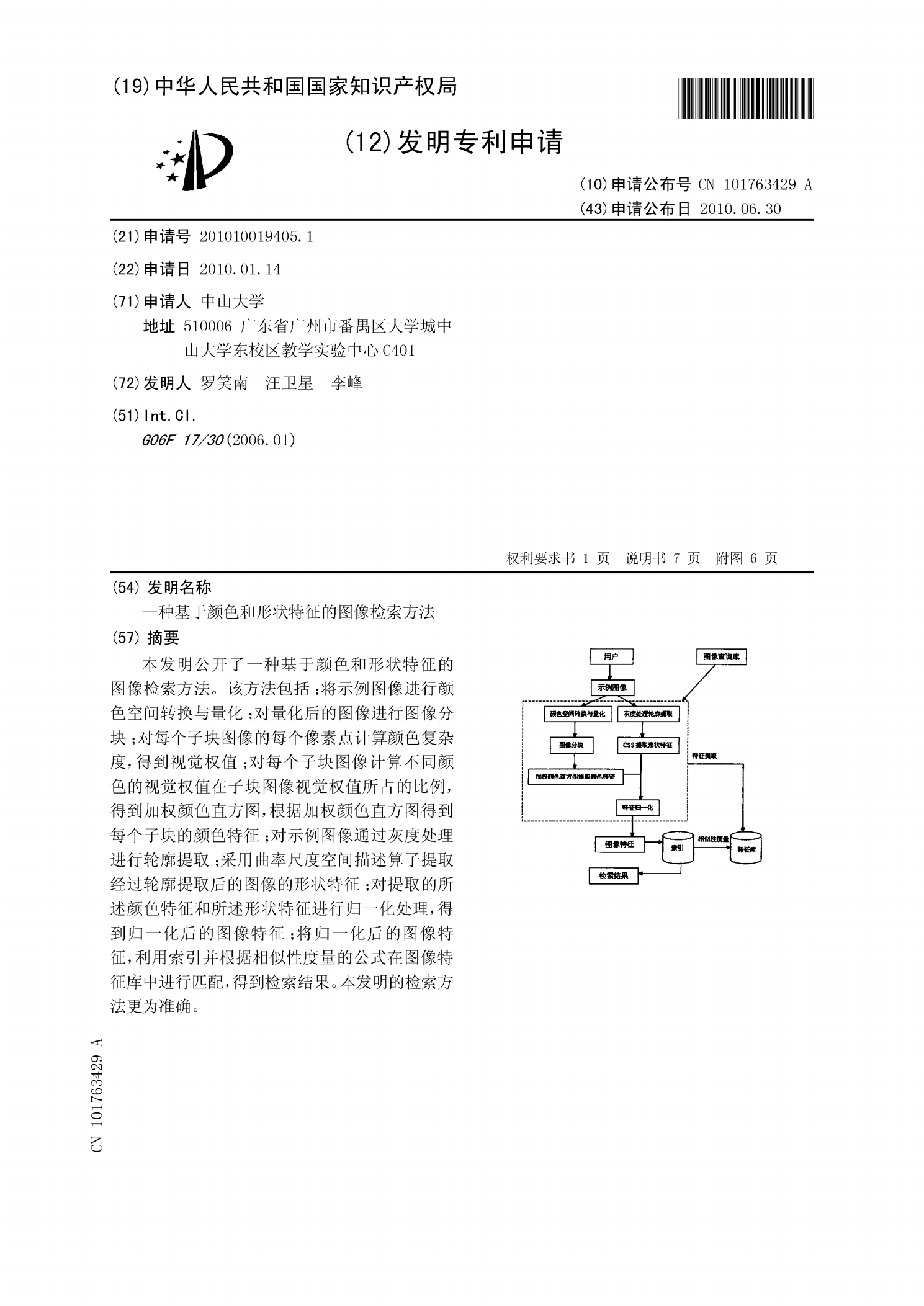
一种基于颜色和形状特征的图像检索方法.pdf
本发明公开了一种基于颜色和形状特征的图像检索方法。该方法包括:将示例图像进行颜色空间转换与量化;对量化后的图像进行图像分块;对每个子块图像的每个像素点计算颜色复杂度,得到视觉权值;对每个子块图像计算不同颜色的视觉权值在子块图像视觉权值所占的比例,得到加权颜色直方图,根据加权颜色直方图得到每个子块的颜色特征;对示例图像通过灰度处理进行轮廓提取;采用曲率尺度空间描述算子提取经过轮廓提取后的图像的形状特征;对提取的所述颜色特征和所述形状特征进行归一化处理,得到归一化后的图像特征;将归一化后的图像特征,利用索引并