
一种机器人手臂用工作固定架杆.pdf

书生****文章


1/10

2/10

3/10

4/10

5/10

6/10

7/10

8/10

9/10

10/10
亲,该文档总共12页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

一种机器人手臂用工作固定架杆.pdf
本发明提供一种机器人手臂用工作固定架杆,包括机械手臂和通孔;所述圆柱杆顶部连接有固定安装台,且固定安装台顶部通过螺栓与机械手臂的底端安装面固定相连接;四组所述内弧形包裹片的外轮廓面设置有一组所述锁紧旋母,且锁紧旋母轴心位置处开设有一处所述通孔;所述锁紧旋母的外围设置有一圈所述环轮,且环轮内壁与锁紧旋母外壁之间通过三根所述连接杆相固定连接。本发明通过扭动锁紧旋母可使得四组内弧形包裹片的内弧面紧紧的与圆球外轮廓面相包裹固定,利于后续机械手臂作业时不会出现抖动和偏移的现象,内弧形包裹片的内弧面紧与圆球外轮廓面之
一种物流搬运机器人用的防滑固定夹持手臂装置.pdf
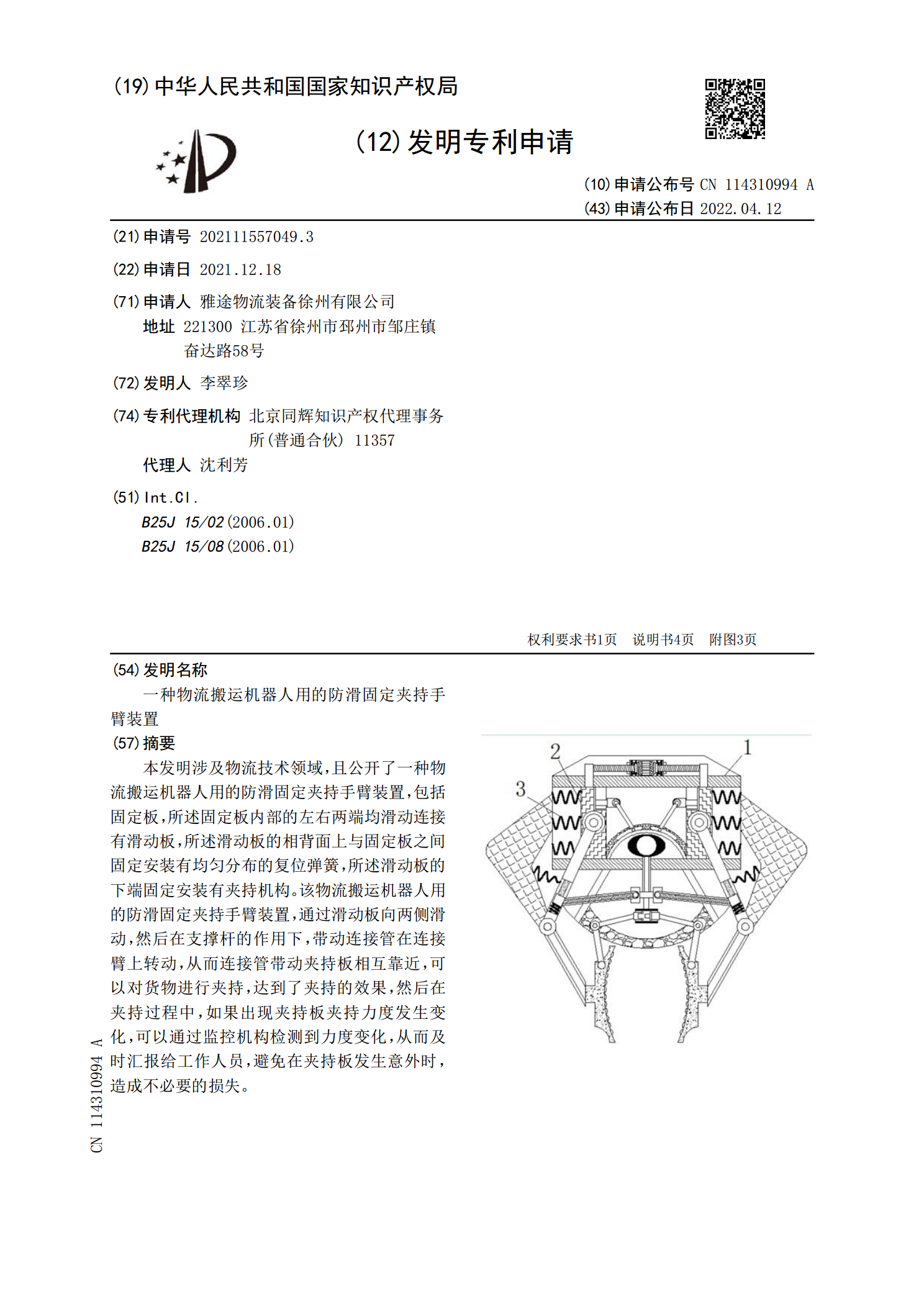
本发明涉及物流技术领域,且公开了一种物流搬运机器人用的防滑固定夹持手臂装置,包括固定板,所述固定板内部的左右两端均滑动连接有滑动板,所述滑动板的相背面上与固定板之间固定安装有均匀分布的复位弹簧,所述滑动板的下端固定安装有夹持机构。该物流搬运机器人用的防滑固定夹持手臂装置,通过滑动板向两侧滑动,然后在支撑杆的作用下,带动连接管在连接臂上转动,从而连接管带动夹持板相互靠近,可以对货物进行夹持,达到了夹持的效果,然后在夹持过程中,如果出现夹持板夹持力度发生变化,可以通过监控机构检测到力度变化,从而及时汇报给工作

一种机器人固定用底部移动架.pdf
本发明公开了一种机器人固定用底部移动架,包括移动底板,所述移动底板的正下方的地面上固定有至少两条导轨,移动底板的底面的前部和后部的左右两侧均设有移动轮,移动轮安装在对应的导轨上;所述移动底板的顶面固定有支撑架,支撑架的顶板的底面中部固定有升降电机,升降电机的输出轴穿过支撑架的顶板并通过联轴器连接有竖直螺套;它可以沿着导轨进行长距离移动,而且其采用主伺服驱动电机带动运行,其移动方便,从而可以实现长距离移动,而且其可以将抓取机器人安装在连接座上,连接座可以根据需要进行高低调节,对抓取机器人的高度进行再度调节,

一种医疗用手臂骨折临时固定架.pdf
本发明公开了一种医疗用手臂骨折临时固定架,包括固定底板,所述固定底板顶部且位于侧支撑架外侧的两端均设置有移动卡槽机构,所述移动卡槽机构的顶部固定连接有药剂瓶,所述移动内螺纹块的内部贯穿有药剂喷嘴,所述下固定架顶部固定连接有下固定软垫,所述固定底板内部的底端且位于鼓风机的左侧固定连接有空气制冷器,所述下固定架和下固定软垫内部均开设有制冷通气孔,本发明涉及医疗技术领域。该医疗用手臂骨折临时固定架,达到了不需要搬动手臂对其喷涂上药,预防手臂的二次伤害,减轻患者的疼痛感,便于医护人员操作,对伤口持续降温消肿,预防

一种焊接机器人用焊枪固定架.pdf
本实用新型公开了焊接设备技术领域的一种焊接机器人用焊枪固定架,包括基座,所述基座的上表面两侧连接有安装板,两组所述安装板的内侧面顶部通过连接架安装有固定筒,所述固定筒内腔安装有焊枪,所述固定筒的前端开设有出口,且固定筒的外表面前端连接有安装环,所述安装环的内壁设有多组连通设置的吸尘嘴,所述安装环的出尘口通过连通管连通外部气泵,所述固定筒的内腔前后两侧壁设有固定盒,所述固定盒内设有降温机构,所述固定筒的后端面两侧连接有固定座,且固定座内设有定位机构,本实用新型解决了焊枪固定架无法对焊接过程中散发的有害烟尘进