
一种机器人固定用底部移动架.pdf

Jo****31


1/7

2/7

3/7

4/7

5/7

6/7

7/7
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

一种机器人固定用底部移动架.pdf
本发明公开了一种机器人固定用底部移动架,包括移动底板,所述移动底板的正下方的地面上固定有至少两条导轨,移动底板的底面的前部和后部的左右两侧均设有移动轮,移动轮安装在对应的导轨上;所述移动底板的顶面固定有支撑架,支撑架的顶板的底面中部固定有升降电机,升降电机的输出轴穿过支撑架的顶板并通过联轴器连接有竖直螺套;它可以沿着导轨进行长距离移动,而且其采用主伺服驱动电机带动运行,其移动方便,从而可以实现长距离移动,而且其可以将抓取机器人安装在连接座上,连接座可以根据需要进行高低调节,对抓取机器人的高度进行再度调节,

一种机器人底部移动机构.pdf
本发明公开了一种机器人底部移动机构,包括移动架和上方开口的梯形结构的承载板,所述移动架的内侧一端固定安装有驱动桥,所述驱动桥的中部固定安装有齿轮箱,所述齿轮箱的一侧转动安装有电机,所述齿轮箱通过传动轴与驱动轮固定连接,所述承载板的底面中部通过钢板弹簧与移动架连接,所述承载板的底部两侧通过销轴转动安装有减震器,所述移动架的另一端通过转轴转动安装有从动轮,所述承载板两个内侧壁之间通过减震器连接,所述承载板的上端开设有连接槽,通过设置行星齿轮,行星齿轮组的齿圈作为主动轴,行星齿轮作为从动件,其转矩是增加的,而且
一种教育机器人的底部移动结构.pdf
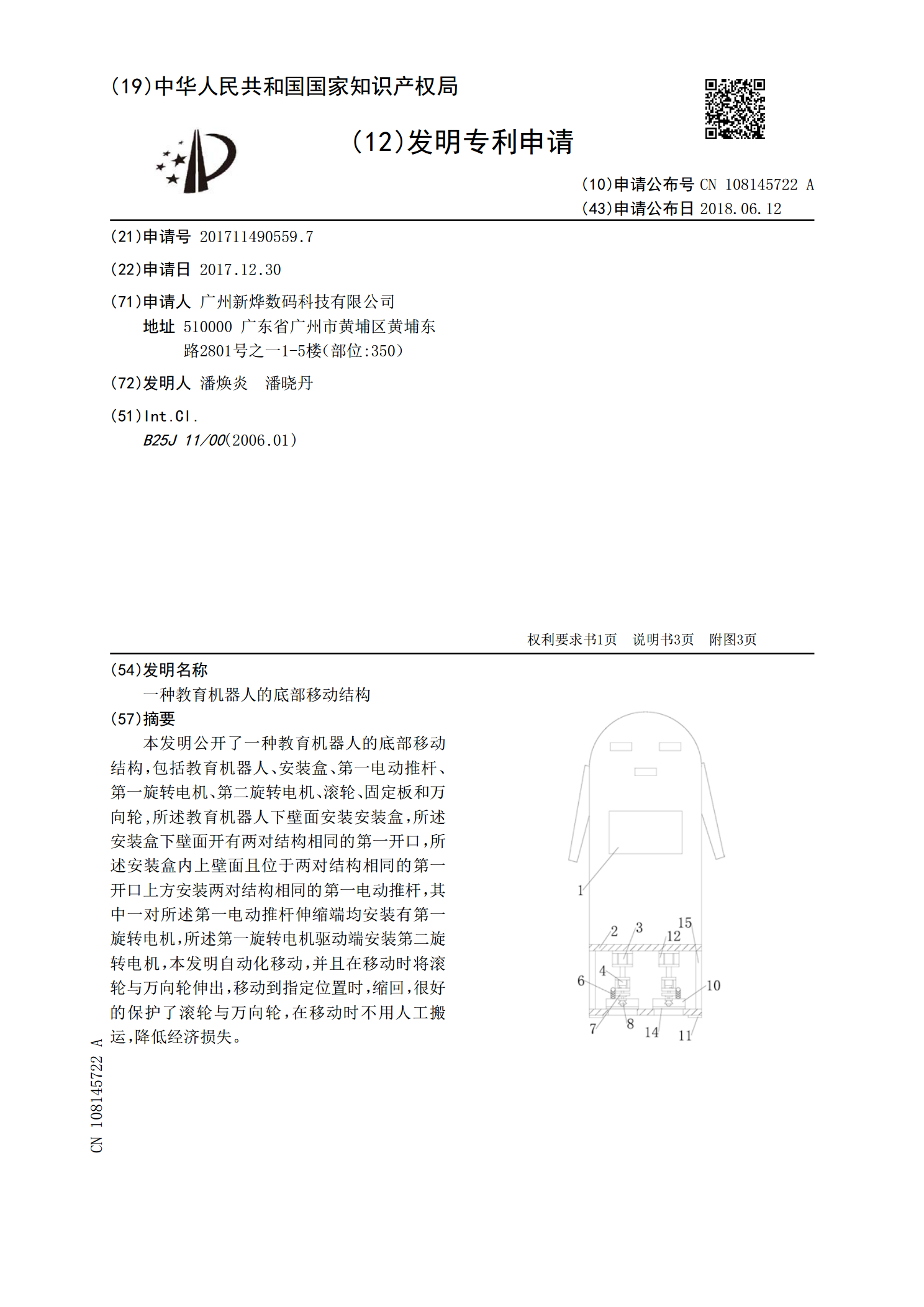
本发明公开了一种教育机器人的底部移动结构,包括教育机器人、安装盒、第一电动推杆、第一旋转电机、第二旋转电机、滚轮、固定板和万向轮,所述教育机器人下壁面安装安装盒,所述安装盒下壁面开有两对结构相同的第一开口,所述安装盒内上壁面且位于两对结构相同的第一开口上方安装两对结构相同的第一电动推杆,其中一对所述第一电动推杆伸缩端均安装有第一旋转电机,所述第一旋转电机驱动端安装第二旋转电机,本发明自动化移动,并且在移动时将滚轮与万向轮伸出,移动到指定位置时,缩回,很好的保护了滚轮与万向轮,在移动时不用人工搬运,降低经济

一种焊接机器人用焊枪固定架.pdf
本实用新型公开了焊接设备技术领域的一种焊接机器人用焊枪固定架,包括基座,所述基座的上表面两侧连接有安装板,两组所述安装板的内侧面顶部通过连接架安装有固定筒,所述固定筒内腔安装有焊枪,所述固定筒的前端开设有出口,且固定筒的外表面前端连接有安装环,所述安装环的内壁设有多组连通设置的吸尘嘴,所述安装环的出尘口通过连通管连通外部气泵,所述固定筒的内腔前后两侧壁设有固定盒,所述固定盒内设有降温机构,所述固定筒的后端面两侧连接有固定座,且固定座内设有定位机构,本实用新型解决了焊枪固定架无法对焊接过程中散发的有害烟尘进

一种用于智能机器人的底部移动机构.pdf
本实用新型公开了一种用于智能机器人的底部移动机构,包括外部防护机构、传动调向机构和传动移动机构,所述外部防护机构的内部中端设置有传动移动机构,所述传动移动机构的外侧设置有传动调向机构,所述外部防护机构包括防护筒、盖板、圆槽、传动板和凹槽,所述防护筒的内部处设置有传动板,且传动板的边缘处开设有凹槽。该用于智能机器人的底部移动机构,采用多个机构之间的相互配合,功能性强,可以传动板内的传动移动机构,来使该移动机构进行向前侧进行移动,以达到带动智能机器人移动的目的,并可使整个传动移动机构被带动进行旋转,以达到调节