
一种主动抗风共轴直升机及主动抗风姿态控制方法.pdf

骊蓉****23


1/10

2/10

3/10

4/10

5/10

6/10

7/10

8/10

9/10

10/10
亲,该文档总共11页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
一种主动抗风共轴直升机及主动抗风姿态控制方法.pdf
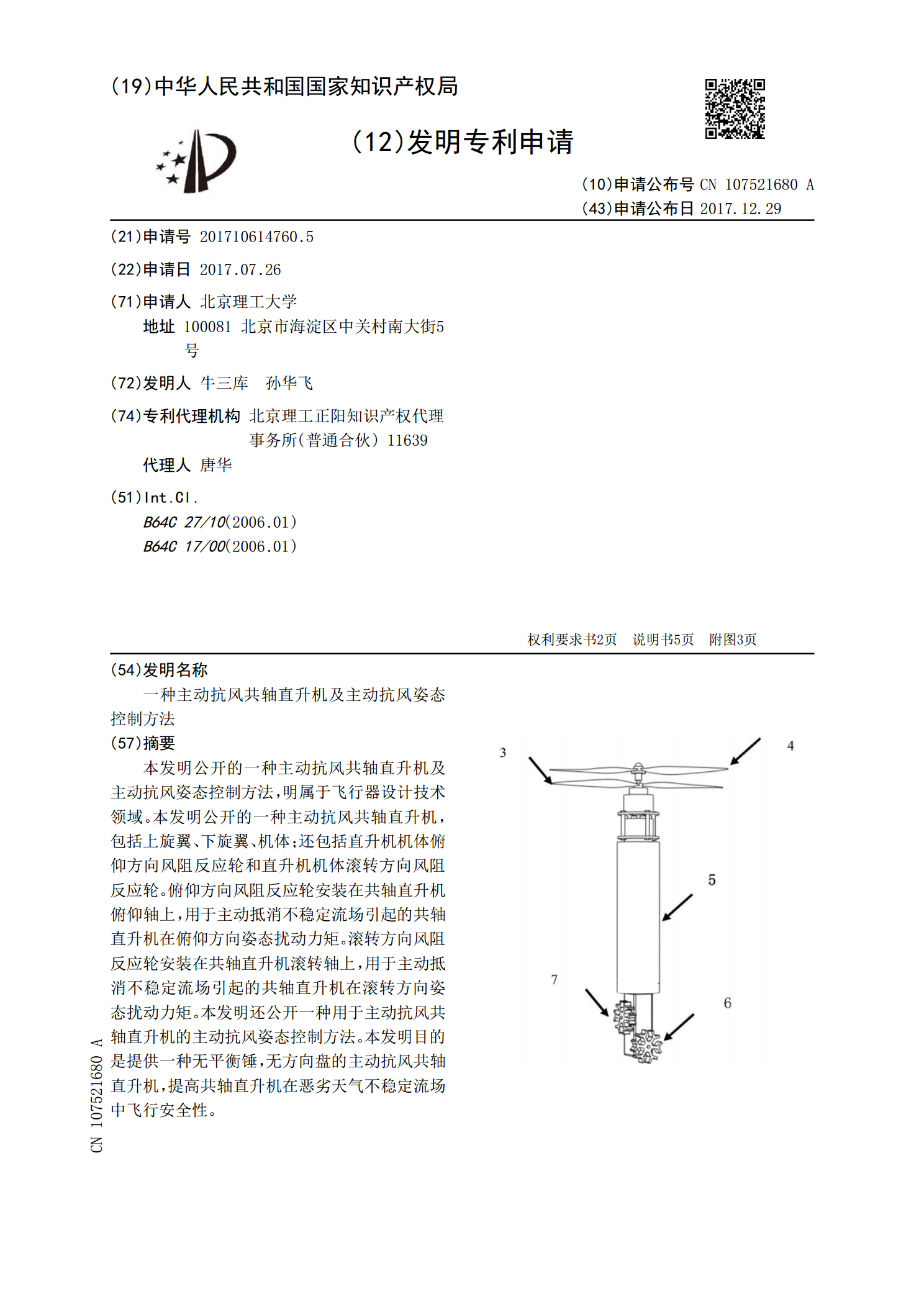
本发明公开的一种主动抗风共轴直升机及主动抗风姿态控制方法,明属于飞行器设计技术领域。本发明公开的一种主动抗风共轴直升机,包括上旋翼、下旋翼、机体;还包括直升机机体俯仰方向风阻反应轮和直升机机体滚转方向风阻反应轮。俯仰方向风阻反应轮安装在共轴直升机俯仰轴上,用于主动抵消不稳定流场引起的共轴直升机在俯仰方向姿态扰动力矩。滚转方向风阻反应轮安装在共轴直升机滚转轴上,用于主动抵消不稳定流场引起的共轴直升机在滚转方向姿态扰动力矩。本发明还公开一种用于主动抗风共轴直升机的主动抗风姿态控制方法。本发明目的是提供一种无平
无人直升机的抗风方法及具有抗风装置的无人直升机.pdf
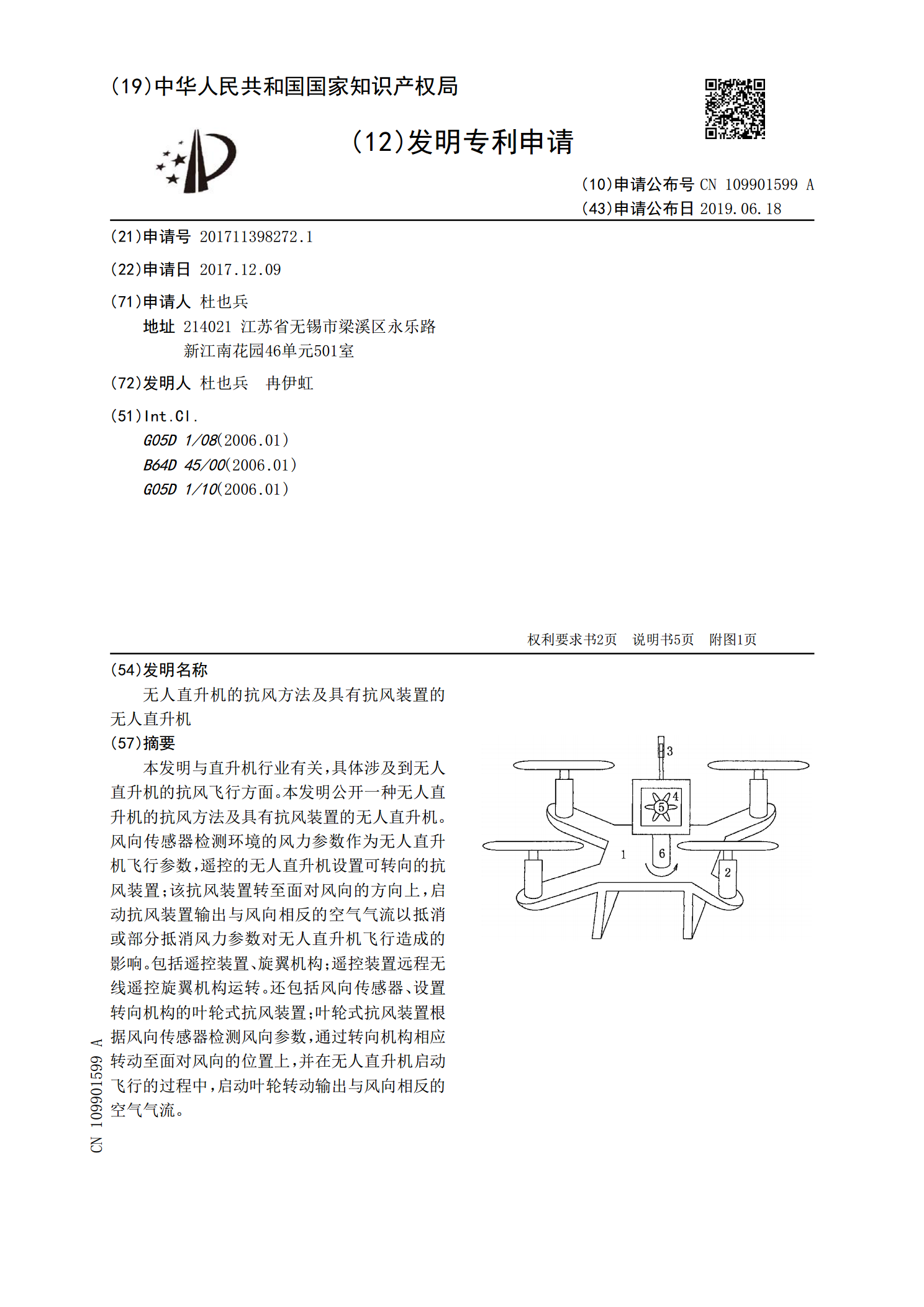
本发明与直升机行业有关,具体涉及到无人直升机的抗风飞行方面。本发明公开一种无人直升机的抗风方法及具有抗风装置的无人直升机。风向传感器检测环境的风力参数作为无人直升机飞行参数,遥控的无人直升机设置可转向的抗风装置;该抗风装置转至面对风向的方向上,启动抗风装置输出与风向相反的空气气流以抵消或部分抵消风力参数对无人直升机飞行造成的影响。包括遥控装置、旋翼机构;遥控装置远程无线遥控旋翼机构运转。还包括风向传感器、设置转向机构的叶轮式抗风装置;叶轮式抗风装置根据风向传感器检测风向参数,通过转向机构相应转动至面对风向

主动抗风的钢箱梁可动风嘴及其控制系统.pdf
本发明公开了一种主动抗风的钢箱梁可动风嘴及其控制系统,可动风嘴包括安装于伸缩挺杆上的左上可动面板、中上可动面板、右上可动面板、左下可动面板、中下可动面板和右下可动面板,可动面板在机械控制系统的作用下产生平动位移和转动位移,使得钢箱梁线形发生改变;控制系统包括机械控制系统、传感器系统,数据分析处理系统,数据传输系统,机械控制系统控制可动风嘴的平动和转动,传感器系统和机械控制系统通过数据传输系统连接至数据分析处理系统。本发明实现了钢箱梁风嘴外形可变,增强了主梁在各种风环境下的适应性,在大跨度桥梁风致振动控制领

线性主动抗扰(LADRC)算法的风电机组变桨距控制.docx
线性主动抗扰(LADRC)算法的风电机组变桨距控制标题:线性主动抗扰(LADRC)算法在风电机组变桨距控制中的应用摘要:风电机组变桨距控制是风电机组运行中的重要一环,其目的是在不同风速下通过调整桨距,最大限度地提高能量捕获效率以及稳定性。本论文主要介绍了一种基于线性主动抗扰(LADRC)算法的风电机组变桨距控制方法。首先,介绍了风电机组变桨距控制的背景和意义,然后详细介绍了LADRC算法的原理和优势,接着提出了一种基于LADRC算法的风电机组变桨距控制策略,并进行了仿真实验和结果分析。结果表明,LADRC

无人直升机前飞抗侧风控制技术.docx
无人直升机前飞抗侧风控制技术无人直升机前飞抗侧风控制技术摘要:无人直升机的应用领域日益扩大,然而在强侧风环境下的飞行控制一直是其面临的一个挑战。本文系统地探讨了无人直升机前飞抗侧风控制技术,包括侧风的影响机理、前飞抗侧风控制的优势以及现有的控制方法和技术挑战。随后,介绍了一种基于模型预测控制(ModelPredictiveControl,MPC)的控制方法,并对其进行算法设计和仿真验证。最后,探讨了未来的研究方向和可能的改进措施。关键词:无人直升机;前飞;抗侧风控制;模型预测控制1.引言无人直升机具有广泛