
无人直升机前飞抗侧风控制技术.docx

快乐****蜜蜂


1/3

2/3

3/3
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

无人直升机前飞抗侧风控制技术.docx
无人直升机前飞抗侧风控制技术无人直升机前飞抗侧风控制技术摘要:无人直升机的应用领域日益扩大,然而在强侧风环境下的飞行控制一直是其面临的一个挑战。本文系统地探讨了无人直升机前飞抗侧风控制技术,包括侧风的影响机理、前飞抗侧风控制的优势以及现有的控制方法和技术挑战。随后,介绍了一种基于模型预测控制(ModelPredictiveControl,MPC)的控制方法,并对其进行算法设计和仿真验证。最后,探讨了未来的研究方向和可能的改进措施。关键词:无人直升机;前飞;抗侧风控制;模型预测控制1.引言无人直升机具有广泛
无人直升机的抗风方法及具有抗风装置的无人直升机.pdf
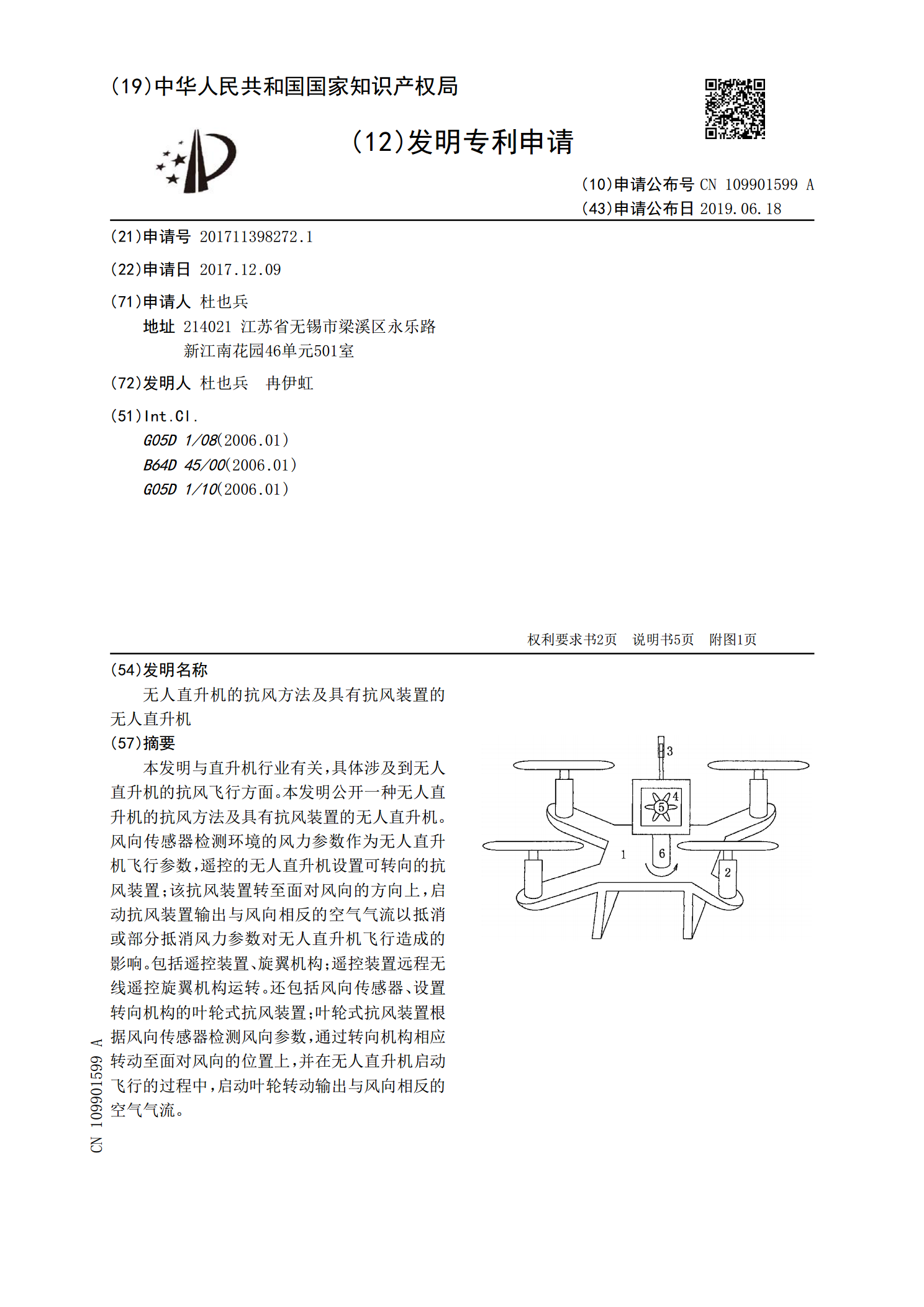
本发明与直升机行业有关,具体涉及到无人直升机的抗风飞行方面。本发明公开一种无人直升机的抗风方法及具有抗风装置的无人直升机。风向传感器检测环境的风力参数作为无人直升机飞行参数,遥控的无人直升机设置可转向的抗风装置;该抗风装置转至面对风向的方向上,启动抗风装置输出与风向相反的空气气流以抵消或部分抵消风力参数对无人直升机飞行造成的影响。包括遥控装置、旋翼机构;遥控装置远程无线遥控旋翼机构运转。还包括风向传感器、设置转向机构的叶轮式抗风装置;叶轮式抗风装置根据风向传感器检测风向参数,通过转向机构相应转动至面对风向

无人直升机前飞段纵向控制技术研究.doc
无人直升机前飞段纵向控制技术研究为了进一步完善无人直升机前飞段纵向控制技术,本文分别对高度/速度的协调控制、发动机功率保护的安全控制、直升机模型RotorLib的二次开发进行研究。首先为了实现高度/速度的协调控制。本文首先从操纵性耦合和状态耦合两个方面论证高度和速度的耦合,而后基于纵向周期变距补偿和总距补偿两种方法分别实现高度和速度的协调控制,实现结果表明基于总距补偿的高度/速度协调控制效果略优于基于纵向周期变距补偿的高度/速度协调控制,最终本文通过风干扰以及重心/质量不确定性验证了基于总距补偿的高度/速

无人直升机前飞段纵向控制技术研究.doc
无人直升机前飞段纵向控制技术研究为了进一步完善无人直升机前飞段纵向控制技术,本文分别对高度/速度的协调控制、发动机功率保护的安全控制、直升机模型RotorLib的二次开发进行研究。首先为了实现高度/速度的协调控制。本文首先从操纵性耦合和状态耦合两个方面论证高度和速度的耦合,而后基于纵向周期变距补偿和总距补偿两种方法分别实现高度和速度的协调控制,实现结果表明基于总距补偿的高度/速度协调控制效果略优于基于纵向周期变距补偿的高度/速度协调控制,最终本文通过风干扰以及重心/质量不确定性验证了基于总距补偿的高度/速

无侧滑角传感器的飞翼无人机抗侧风控制方法.docx
无侧滑角传感器的飞翼无人机抗侧风控制方法无侧滑角传感器的飞翼无人机抗侧风控制方法摘要随着无人机技术的发展,飞翼无人机成为其中一种常用的平台。然而,飞翼无人机在飞行过程中容易受到侧风的影响,导致其出现侧滑现象。传统的抗侧风控制方法主要使用侧滑角传感器进行侧滑角的测量和控制,但这种传感器的应用受到一些局限性的限制。本文提出了一种无侧滑角传感器的飞翼无人机抗侧风控制方法,通过多种传感器数据的融合和改进控制算法,实现了对侧风的抵抗和无人机的稳定飞行。关键词:飞翼无人机;侧滑角传感器;抗侧风控制;融合;改进控制算法