
用于自动牵拉拖车的机器人拖车牵拉车辆.pdf

书生****文章

1/10
2/10
3/10
4/10
5/10
6/10

7/10

8/10
9/10

10/10
亲,该文档总共13页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
用于自动牵拉拖车的机器人拖车牵拉车辆.pdf
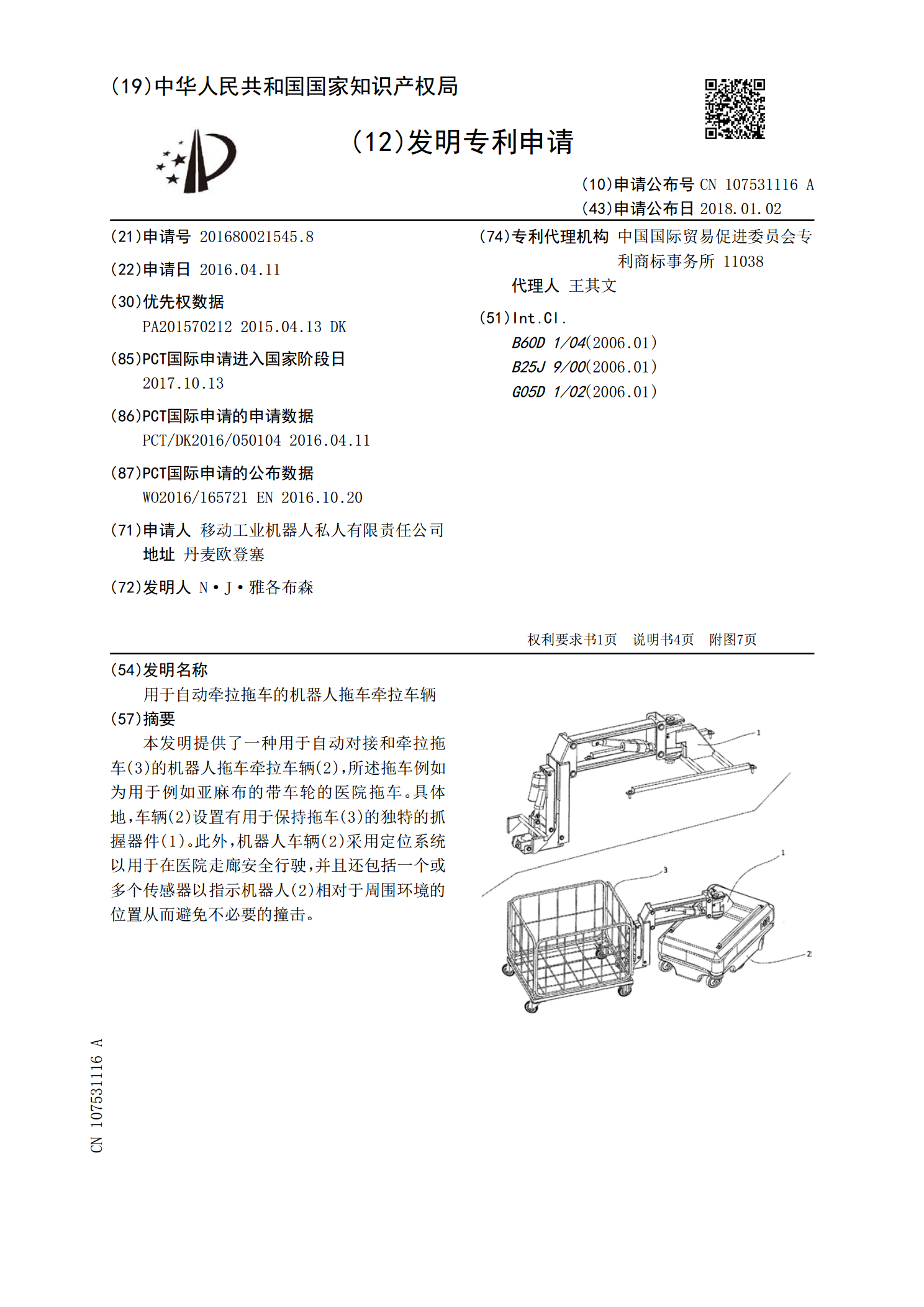
本发明提供了一种用于自动对接和牵拉拖车(3)的机器人拖车牵拉车辆(2),所述拖车例如为用于例如亚麻布的带车轮的医院拖车。具体地,车辆(2)设置有用于保持拖车(3)的独特的抓握器件(1)。此外,机器人车辆(2)采用定位系统以用于在医院走廊安全行驶,并且还包括一个或多个传感器以指示机器人(2)相对于周围环境的位置从而避免不必要的撞击。

用于儿童车辆的拖车.pdf
一种用于儿童车辆的拖车,其特征在于:用于容纳散布的材料的盆状件;驱动壳体,盆状件设置在该驱动壳体上;驱动轴,该驱动轴被可转动地支撑在驱动壳体中且被连接至驱动轮,以用于随该驱动轮转动,该驱动轮优选是驱动齿轮;传动装置,该传动装置优选是在驱动壳体中的齿轮系,该传动装置与驱动轮啮合;和散布盘,该散布盘与传动装置可转动地附连,其中盆状件包括具有用于散布的材料的排出口的底部,排出口设置在散布盘上方,以便排出的散布的材料掉落在散布盘上。
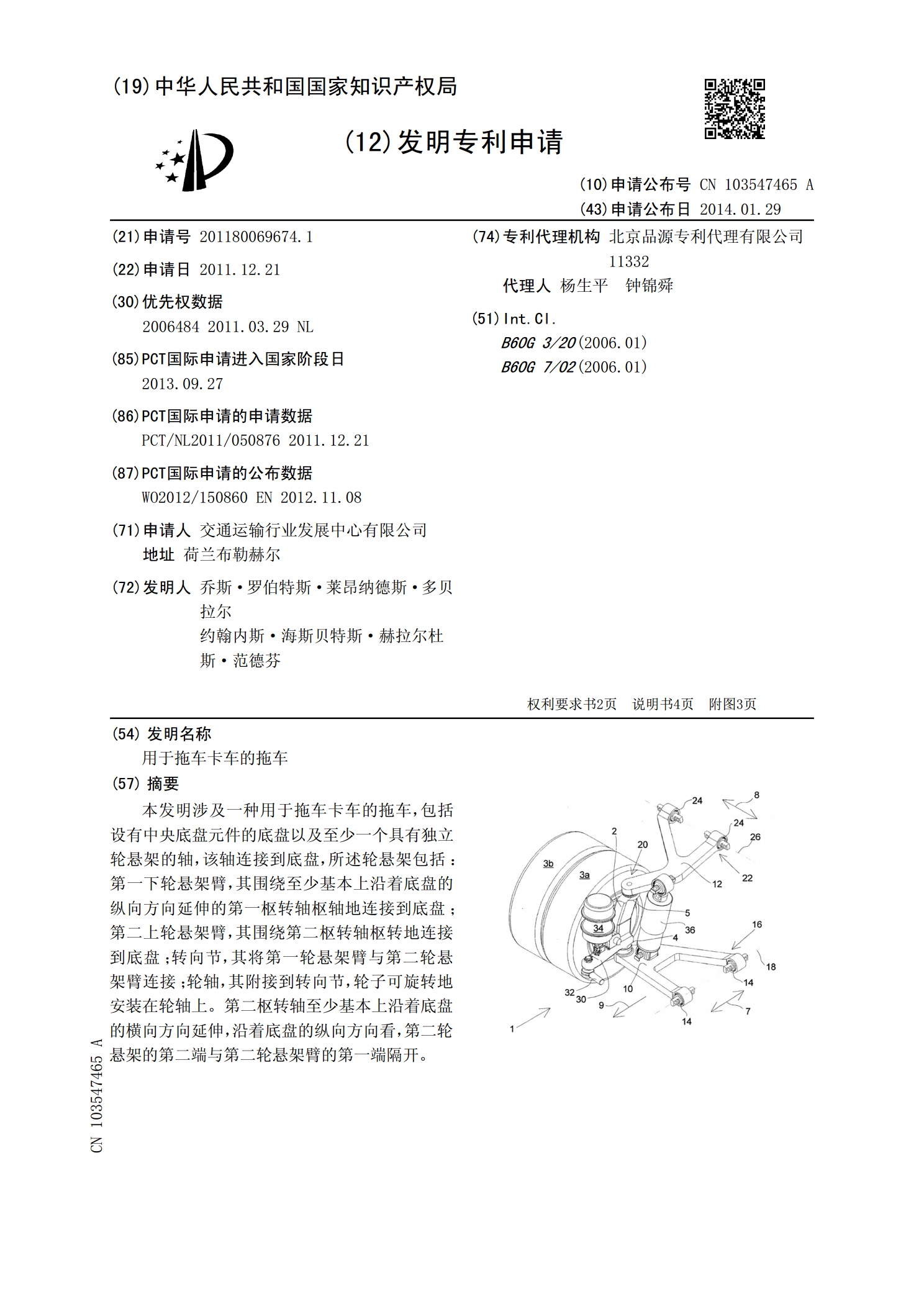
用于拖车卡车的拖车.pdf
本发明涉及一种用于拖车卡车的拖车,包括设有中央底盘元件的底盘以及至少一个具有独立轮悬架的轴,该轴连接到底盘,所述轮悬架包括:第一下轮悬架臂,其围绕至少基本上沿着底盘的纵向方向延伸的第一枢转轴枢轴地连接到底盘;第二上轮悬架臂,其围绕第二枢转轴枢转地连接到底盘;转向节,其将第一轮悬架臂与第二轮悬架臂连接;轮轴,其附接到转向节,轮子可旋转地安装在轮轴上。第二枢转轴至少基本上沿着底盘的横向方向延伸,沿着底盘的纵向方向看,第二轮悬架的第二端与第二轮悬架臂的第一端隔开。

车辆牵拉器.pdf
车用防尘罩,属于车辆零件、装置和附件技术领域,由回力发条、卷轴、车前窗罩、牵引条、体侧连接褶、侧翼、防尘罩体、牵引环、牵引轴、栓系绳、粘合磁条、栓系绳孔、卷轴体、卷轴体固定板、牵引槽固定丝、牵引槽、电机、牵引绳、滚轮、牵引绳固定圈、滚轮轴、轮轴连接杆、固定环条、牵引绳绕圈、牵引绳绕轴、牵引绳绕轴齿轮、导力链条、电机转子组成。车用防尘罩利用电机将位于卷轴体内的防尘罩体自动拉出,蒙盖在车体上,同时,将防尘罩体的侧翼放下,罩住整个车身用于防尘。防尘罩体可以设计成不同的外观,使其美观大方,从而避免了车辆的单调并美
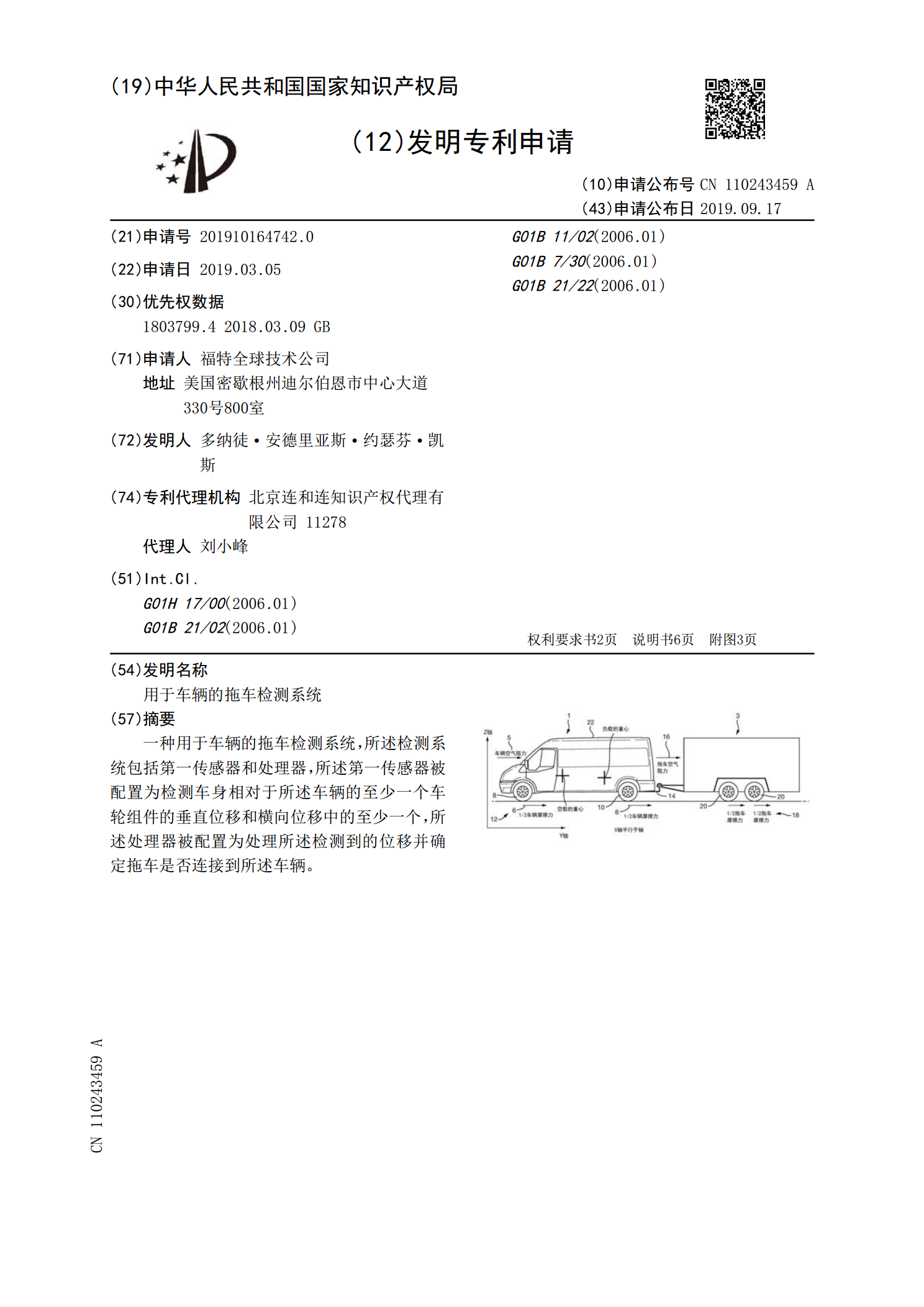
用于车辆的拖车检测系统.pdf
一种用于车辆的拖车检测系统,所述检测系统包括第一传感器和处理器,所述第一传感器被配置为检测车身相对于所述车辆的至少一个车轮组件的垂直位移和横向位移中的至少一个,所述处理器被配置为处理所述检测到的位移并确定拖车是否连接到所述车辆。